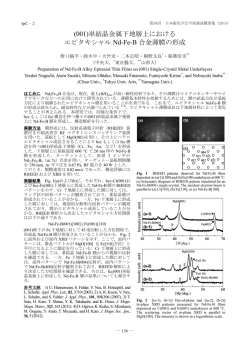
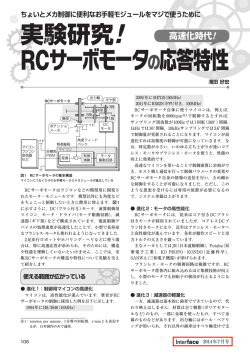
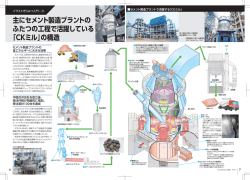
9 第 1 章 サーボモータドライブのシステム概要 岐阜大学 1.1 内藤治夫 技術動向 電動機が発明されてから 200 年弱の時が経過し、今や人間社会のあらゆると ころで電動機が使われている。現在、世の中で使われている電動機を台数で見 れば、その多くは特別な制御は施されず、ほぼ一定速度で使用されている。 速度制御を始めとする電動機の各種制御は、電動機を駆動する電源(電力変 換器)の制御により実現される。1970~80 年頃から、半導体素子及びそれに立 脚するパワーエレクトロニクス技術が急速に発展した。それらの主なものは以 下の通りである。 ・半導体素子の高耐圧、大電流化 ・半導体素子の動作周波数の向上と動特性の改善 ・電圧駆動ゲートドライブ回路を持つ半導体素子(IGBT、MOSFET など)の 発展 ・半導体素子のパッケージ化、配線の低インダクタンス化、効率の良い冷却 など、実装技術の向上 ・電力変換器の小型・軽量・低コスト化 ・マイクロコンピュータや DSP(Digital Signal Processor)などの演算処理素 子の高速化、高機能化、低コスト化 ・各種センサ、A/D 変換や D/A 変換などの周辺素子の高速化、低コスト化 以上の技術開発に伴って、電力変換器の制御がそれ以前に比べて格段に容易に なった。この制御技術が日々向上するに従い、それまで仕方なくほぼ一定速で 駆動していたモータを、用途・必要に応じて可変速で駆動するようになってき ている。 この技術開発の狙いは、モータの持つ機能・性能を最大限に引き出すことで ある。この目標は現在でも変わることなく追求されている。これに加えて、最 近では、もう 1 つ重要な意義がモータの可変速ドライブに課せられ、且つ期待 されている。それは省エネルギーである。民生用、産業用を問わず、世の中に 存在する全てのモータが、全電気エネルギーの 2/3 を消費すると言われている。 モータをその負荷の状態に関係なく、一定速度で駆動することはエネルギー消 10 費の点では問題が大きい。特に、地球温暖化など環境問題が深刻になりつつあ る現在では、モータでの省エネルギーは、上記の通りモータでのエネルギー消 費が多い分だけ重要度が高く、実施すればその効果も大きい。モータでの省エ ネルギーは、モータを、常に必要とされるトルクや回転速度で過不足なく運転 すれば達成できる。そのためにも、モータの可変速ドライブが必要とされるの である。 1 , 2) 小容量モータ(数 10kW 以下)では、上記の技術動向に加えて、最近、超強 力永久磁石が磁石材料の性能面でも、製造コストの点からも使いやすくなり、 永久磁石モータを用いたドライブシステムの小形・軽量化が格段に進展してい る。この結果、従来では考えられなかった小容量用途にも、適用が広がりつつ ある。 永久磁石材料として代表的なものは、現在も単なる磁石として家庭やオフィ スなどでも使われている、酸化鉄を主剤とするフェライト系磁石である。強力 磁石としては、希土類を用いた Sm-Co(サマリウム・コバルト)系磁石がまず 開発された。その後、同じく希土類のネオジウムを主要成分とする Nd-Fe-B(ネ オジウム・鉄・ボロン)系磁石が開発され現在に至っている。 磁石の強さの尺度である最大エネルギー積で見ると、Nd-Fe-B 系磁石は現時 点で約 55MOe 程度である。これは、ごく普通の磁石であるフェライト磁石の 約 10 倍の強さである。Nd-Fe-B 系磁石の最大エネルギー積の理論限界値は約 65MOe と予測されており、年々限界値に近づきつつある。 「希土類」とは言いながら、サマリウムやコバルトとは異なり、ネオジウム は埋蔵量が多く、素材そのものの価格はそれ程高くはない。それよりも、粉末 の素材から製品を成形・加工する基本製造技術の特許が高コストの原因であっ た。2000 年代初めにこの製造特許が切れたことで、Nd-Fe-B 系磁石の低価格化 が進んでいる。 Nd-Fe-B 系磁石のもう 1 つの難点は、許容温度の上限が低いことにあった。 1990 年代では、百数十度が限界で、モータとして使用するには、その設置場所 や冷却装置の取り付けなどに大きな制約があった。現在の許容温度上限は 200℃程度にまで達しており、モータ用としてかなり使いやすくなってきている。 Nd-Fe-B(ネオジウム・鉄・ボロン)磁石の製造基本特許が切れるまでは、 モータ用の永久磁石としては、もっぱらフェライト磁石が使われていた。磁力 が弱いため、モータ容量としては、せいぜい数百 W が上限で、用途も家電機器 や OA 機器に限定されていた。 Nd-Fe-B 系磁石が主流となった現在では、その磁力の強さの恩恵で、数十 kW の容量のモータも実用可能となっている。産業用機器、交通・昇降機、工作機、 11 ハイブリッド自動車、電気自動車、家電製品ではあるが容量の大きいエアコン 用など、従来主に誘導モータが使われていた用途での適用が進んでいる。更に は、従来はフェライト磁石を使用していた上記の家電機器や OA 機器にも広が りつつある。 1.2 基本構成 図 1-1 にモータドライブ制御系の基本構成を示す。図中、電源は一定の交流 電源ないしは直流電源である。 電源 電力 電力 変換器 変換器 モータ 電流 センサ 変換器 制御回路 負荷機械 位置/速度 センサ 電力線 制御回路 信号線線 機械連結 上位コントローラ 図 1-1 電動機ドライブ制御系の基本構成 電力変換器はパワーエレクトロニクス技術により、一定の電源から供給され る電力の形態を変換する装置である。電力の形態とは、電気の 6 つの要素、即 ち、①電圧、②電流、③周波数、④位相、⑤波形、⑥相数、である。 3) 電力変 換器は、これらのうちの幾つかないしは全てを、用途にふさわしく変換・制御 する。電力変換器が電力を供給する相手の装置、つまり負荷がモータである。 モータにとっては、電力変換器が電源であると考えても良い。電力変換器につ いては第 2 章で詳しく説明する。 モータは、電気エネルギーから回転力(トルク)を発生し、モータに接続さ れる負荷である負荷機械に機械エネルギーを与える。つまり、モータはトルク 発生装置であり、電気エネルギーを機械エネルギーに変換するエネルギー変換 装置でもある。モータについては第 3 章で DC サーボモータ、第 4 章でブラシ 12 レス DC モータ、第 5 章で AC サーボモータについて解説する。 なお、モータを電動「機」とし、電動「器」とはしないこと、或いは変換「装 置」とし、変換「器」とは呼ばない理由は、モータが動き(回転)を伴う装置 だからである。これに対し、電力変換器は、機械的な動きをしないので変換「器」 と称する。変圧器も同じ理由で、変圧「器」であって、変圧「機」ではない。 モータを制御するためには、モータの状態を監視しなければならない。この 目的で、モータ制御系では、通常、電流センサと、位置または速度センサある いは両方が取り付けられる。これらの電流・位置・速度の情報が、自動制御の 章(第 6 章)で説明するフィードバック信号である。制御の目的、やり方によ っては、速度ないし位置センサは省略されることもある。電圧センサが付加さ れることもある。但し、電流センサが省略されることは、コストが厳しい家電 製造や OA 機器用途を除き、あまりない。これは、モータがトルク発生装置で、 モータ制御にはトルクの監視が不可欠であること、そしてトルクは電流との比 例関係から算出できるためである(但し、第 5 章で説明する IPM 形の AC サー ボモータではこの比例関係が成り立たない)。変換器の制御方式によっては、電 源の情報(電源電圧・電流値、力率など)を取り入れることもある。以上の情 報を取り込み、比例・積分などの自動制御の補償要素の計算、ベクトル制御や 非干渉制御のための計算、及びシステムの状態監視などを制御回路で行う。制 御回路はマイクロコンピュータないしは DSP を主素子として、メモリ、各種セ ンサや変換器のゲート回路とのインタフェースである A/D、D/A 変換素子など で構成される周辺回路よりなる。モータの自動制御に関しては、第 6 章でモデ ル化の方法と仕様を満足するための設計法を述べる。センサは第 7 章で解説す る。 負荷機械は、モータの適用用途によって千差万別である。負荷機械はモータ にシャフトで直結、ないしはギヤやベルトなどを介して結合される。モータか ら与えられる回転力をそのまま使うか、直線運動などへ変換するかは負荷機械 の機能による。負荷機械については、モータの基本である DC サーボモータの 章(第 3 章)で取り上げる。 上位コントローラは、モータ制御系への指令値を作り出す部分である。例え ば、電車やエレベータなどの加減速パターン、鉄鋼圧延巻き取り機へのトルク プロファイルなどが、制御回路へ与えられる。人間が運転する自動車では人間 が上位コントローラに相当する。通常、上位コントローラはモータドライブ制 御系には含めないことが多い。本書でも割愛する。 66 第 3 章 DC サーボモータドライブ制御システム 岐阜大学 内藤治夫 本書で取り上げる DC サーボモータ、ブラシレス DC モータ、AC サーボモー タの根本原理は、どれも本章で、DC サーボモータに関して説明する回転原理 と共通である。加えて、ブラシレス DC モータ、AC サーボモータの等価回路は、 それぞれにつき第 4 章及び第 5 章で解説するインバータの制御法を適用すれば、 DC サーボモータの等価回路に帰着する。以上のことから、DC サーボモータは、 これらモータの基本であると言える。本章ではこの回転原理の他、モータのド ライブ制御法など、本書のモータに共通することはこの章で述べる。 なお本書では、「モータドライブ系」はモータとそれを駆動するチョッパや インバータなどの電力変換器より構成される系、「モータドライブ制御系」は、 モータドライブ系とその電流や速度を制御する自動制御系を含む系と呼ぶこと とする。 3.1 基本構成と回転原理 3.1.1 電磁力(アンペールの力) モータが基礎をおく物理現象は、電磁力と電磁誘導である。電磁力がトルク (回転力)として作用し、電磁誘導が逆起電力を生じる。これらはモータに共 通する電磁現象で DC サーボモータに限ったことではない。 本項では電磁力について説明する。モータはトルク発生機で、トルクは電磁 力により得られる。電磁力とは、磁界中におかれた電流に発生する力、つまり アンペールの力である。現実的には、電流を流している導体に力が働くと考え てよい。この導体が可動であれば、その導体は力の方向に動く。図 3-1 にはこ の状況を描いている。この電磁力が DC サーボモータをはじめとして、大半の モータ(リラクタンスモータを除く)のトルクの源泉である。 この電磁力の定式化の要点を以下に記す。単位長さ当たりの電磁力を F0、電 流を I、磁束密度を B とすると、以下の関係が成り立つ。 F0 = B × I (3.1) 67 可動導体 磁束密度 B :磁力線 力F 電流 I コの字形導体 人差し指:磁界 親指:力 中指:電流 図 3-1 電磁力とフレミングの左手の法則 ここで、全ての量はベクトル量、×はベクトル積(外積)を表す。ベクトル積 の公式により、I と B のなす角度をθとすると F0 = I B sin θ (3.2) である。 式(3.2)から、電流ベクトルと磁束密度ベクトルのなす角が 90 ゚のとき、電 磁力は最大であることがわかる。モータでは当然最大の力を引き出したいから、 この角度をできる限り 90 ゚になるよう設計する。特殊な状況でない限り、モー タではこの角度は 90 ゚としてよい。従って、モータでは可動導体の有効長を L として式(3.2)は、 F = BIL (3.3) とできる。これを BIL 則と呼ぶ。θ=90 ゚のときの 3 つのベクトルの向きの関係 をわかりやすく示すのが図 3-1 のフレミングの左手の法則である。 3.1.2 整流子とブラシ:持続するトルクの発生機構 図 3-1 の構成で得られる電磁力は併進力である。これをトルクとするには図 3-2 に示したように、導体(図では長方形の一巻きのコイル)を回転軸の回り に回転させる構造とする。図示したように、このコイルは実際には円筒状の鉄 心に巻き付ける。この鉄心は、絶縁被膜を施した薄い円形の鉄板を多数積み上 げた積層構造である。強磁性体である鉄に磁束を通すことで、磁界を空心時に 比べ数千倍に強くできる。このコイルと鉄心で構成されトルクが発生する構造 68 固定子 回転子 B 整 流 子 C む A ブ ラ シ 図 3-2 D DC サーボモータの原理的構成 物を電機子と呼ぶ。DC サーボモータでは電機子を回転させるので、電機子は 回転子でもある。この DC サーボモータの構造を回転電機子形と称する。磁界 は、台座に固定され回転子を収納する構造物でもある固定子に取り付けた永久 磁石より得る。この磁界を発生する機構を界磁と呼ぶ。 この図のコイルでは、辺 AB、CD に働く力 F が互いに平行・逆向きで、偶 力として作用し、コイルを回転させる。図では右回転である。辺 BC、DA には、 この図ではたまたまこの二辺と磁界の向き(図中 B の矢印)が平行なので、力 は発生しない。平行でない場合は、力が発生するものの、両辺の力は共にコイ ルの内側向きとなるので、互いに打ち消し合って、何の作用もしない。この両 辺をコイルエンドと呼ぶ。実際のモータでは、コイルエンドは磁界の外に配置 されるので、力すら発生しない。コイルエンドは当然なるべく短いほうがよい。 以上の行程だけでは一方向に持続するトルクが得られない。図 3-2 の配置か らコイルが 90 ゚以上回転し、且つ電流の向きが不変ならば、トルクは逆回転の 向きに作用する。持続回転を得るには、コイルが 90 ゚回転した時点で電流の向 きを反転させればよい。これを機械的接触の切換で行うのが、図 3-2 中に破線 96 第 4 章 ブラシレス DC モータドライブ制御システム 岐阜大学 内藤治夫 DC サーボモータは、直流電源の電圧だけで、電流ひいてはトルクが制御で きる。電源のハードウェアのコストの点からも、制御のソフトウェアの簡単さ の点からも優れたモータである。この特長は整流子-ブラシに負う。他方、整 流子-ブラシには機械的に脆弱など、3.1.5 項で指摘した問題点がある。これら は実用上かなり深刻で、ある程度以上の容量(100W 程度以上)のモータとし ては、現在は DC サーボモータはあまり使われていない。 整流子-ブラシの本質的機能は、適切なタイミングで電機子電流を切り替え ることである。この適切なタイミングの決定を磁極位置センサ、電機子電流の 切り替えを半導体素子のスイッチング機能で行うモータが、ブラシレス DC モ ータ(brush-less dc motor)である。DC サーボモータではこの切り替えをモー タ側で行うが、ブラシレス DC モータでは電源側の半導体スイッチで行う。ブ ラシレス DC モータ用電源(インバータ)では、その出力電圧だけではなく、 切り替えのタイミングも制御せねばならず、その分制御が複雑になる。 ブラシレス DC モータはその名の通り DC モータで、DC サーボモータの欠点 (整流子-ブラシ)を克服したモータなのである。 4.1 ブラシレス DC モータの基本構造基本構成と回転原理 トルク発生の原理は DC サーボモータと同じである。即ち、界磁中に流れる 電流に作用する電磁力がトルクの源泉である。 電源側の半導体スイッチで電機子電流を切り替える都合上、電機子巻線が固 定子に巻かれ、界磁である永久磁石が回転子に取り付けられる。この構造を回 転界磁形と呼ぶ。図 4-1、4-2 にブラシレス DC モータの基本構成図を示す。 図 4-1 では、固定子、回転子ともに非突極形である。電機子巻線は固定子に 分布巻きとしている。図 4-2 では固定子が突極形である。■はホール効果を利 用した磁極位置センサである。詳しくは次項で説明するが、磁極の位置に応じ て電機子電流を切り替えるための磁極位置情報を出力する。 電源電圧は 3 相交流電圧である。本書では 3 相を U 相、V 相、W 相とする。 単なる商用交流電源ではなく、インバータで供給される可変電圧、可変周波数 97 W U 3相 交流電圧 HU V N インバータ V S HV HW ゲート信号 U W 転弧制御 回路 磁極位置センサ 磁極(回転子)位置信号 図 4-1 非突極形ブラシレス DC モータの原理構造 3相 U HU 交流電圧 HV インバータ S W N HW V ゲート信号 転弧制御 回路 磁極(回転子)位置信号 図 4-2 磁極位置センサ 突極形ブラシレス DC モータの原理構造 の電源である。交流ではあるが、電圧波形は方形波のパルス列(PWM 波形) で、その平均値は DC サーボモータを駆動するチョッパと同じく直流である。 同じくインバータで駆動する次章の AC サーボモータでは、同様に方形波の電 圧パルス列(PWM 波形)が印加されるが、その基本波成分が正弦波となるよ うパルス列が成形される点が大きく異なる。 インバータでは磁極位置センサからの情報に基づき、適切なタイミングで電 機子電流を切り替えるとともに、回転子の速度に応じてその切り替えの頻度、 即ち出力電圧周波数(インバータ周波数)を変える。この磁極位置センサとイ ンバータの組み合わせにより、DC サーボモータのブラシ-整流子の機能を果 98 たしているのである。 磁極位置センサの解像度は、次項で説明する 120 ゚通電形のブラシレス DC モ ータでは 60 ゚でよい。60 ゚の解像度を得るには図 4-1、4-2 に示したように 3 個 の磁極位置センサで十分である。 4.2 トルク発生の原理 4.2.1 分布巻機のトルク発生原理 分布巻き機の固定子では図 4-1 に示したように、U、V、W 相の各相がそれ ぞれ 60 ゚ずつに 2 分割され、合計で円周の 120 ゚を覆うように巻線が施される。 図 4-3 は、1 相分の 60 ゚幅の巻線 2 つだけを示した図である。この図により、 分布巻きブラシレス DC モータのトルク発生原理について説明する。電源は電 圧源であるから、電流切り替えは各巻線への印加電圧切り替えの結果として、 過渡現象を伴って実現される。 (1)通流開始 同図(a)に示したように、60 ゚分の巻線が全て同一磁極に対向した瞬間、図 では回転磁極の境界が上側巻線の右端(下側巻線の左端)に到達した時刻から 通流を開始する。電機子電流に発生する電磁力の方向は、フレミングの左手の 法則からは左向きである。電機子巻線は固定されているので、電磁力の反作用 力がトルクとして作用し、回転子が右回転する。ここでは右回転トルクを正と する。 (2)通流終了 その後 120 ゚回転すると、回転磁極の境界が上側巻線の左端に到達する。こ のタイミングでこの巻線への通流を終了する(同図(b))。 (3)非通流期間 この後も回転子は回転を続け、同図(c)のように、回転磁極の境界を巻線が またぐ。この期間は 60 ゚続く。 もし、この間も通流を続けると、巻線の一部が S 極と対向するので(例えば、 同図(c)の上辺巻線では左の 2 本)、それらの巻線にはこれまでとは逆方向の 負トルクが発生する。巻線全体のトルクは各巻線のトルクの総和である。前半 30 ゚間、総トルクは正ではあるが減少する。このこと自体は必ずしも悪いこと ではなく、AC サーボモータではこの期間でも通流を続けるが、ブラシレス DC モータでは原則として通流させない。
© Copyright 2026 Paperzz