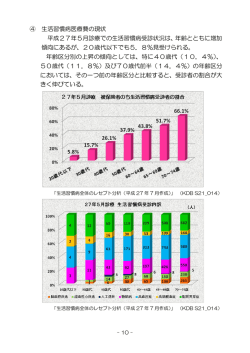
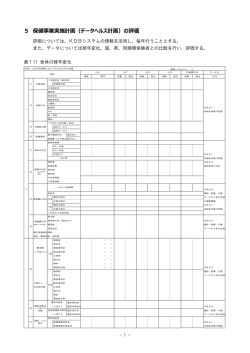
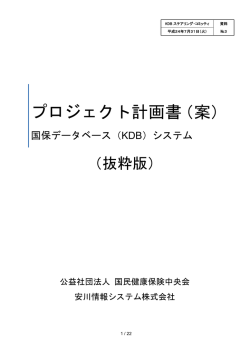
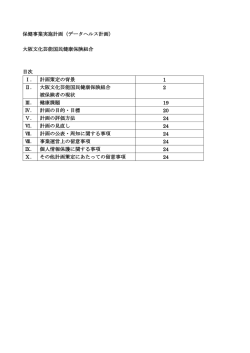
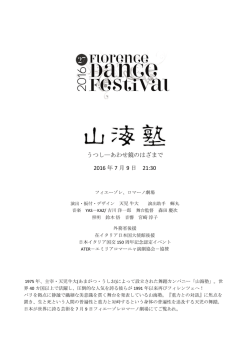
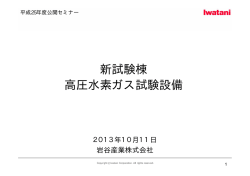
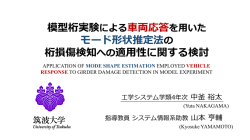
ハイブリッドシステムモデルに基づく モデル予測型前方車追突回避アシストシステムの設計 Model Predictive Collision Avoidance Assisting Control Based on Hybrid System Model ○非 鳥居 武仁,非 三上 晃司,正 奥田 裕之,正 田崎 勇一,正 鈴木 達也,非 武田 一哉(名大) Takehito TORII, t [email protected], Koji MIKAMI, Hiroyuki OKUDA, Yuichi TAZAKI, Tatsuya SUZUKI and Kazuya TAKEDA, Nagoya Univ. This paper presents verifications of proposed personalized assisting control using an actual car. A single-seated small electric vehicle is used to log driver’s behavior in vehicle following tasks. Driver model is expressed as a PieceWise AutoRegressive eXogeneous(PWARX) model widely recognized as hybrid dynamical system. First, the braking assistance system with the model is designed and examined on a driving simulator. The optimum assisting control is based on model predictive control and given by solving Mixed Integer Programming(MIP) on-line. After implementation of the assistance system on the electric vehicle, it is aimed to verify the effect by comparing actual car’s and simulated results. Key Words : hybrid system, model predictive control 1. は じ め に 近年,自動車運転における安全性や快適性を高めるた め,様々な運転支援システムが開発されている.これま での運転支援システムの機能や性能は平均的な運転者に 対応するものであったが,より積極的なアシストを実現 するには,車を一種の「人間–機械系」として捉え,運転 者の行動特性を解析し,得られた特性をベースに個人適 合型の運転支援システムを開発・設計することが必要と なる. (1) 筆者らは従来研究 において,人間の行動が離散的処 理と連続的処理の混在である点に着目し,連続 / 離散の ハイブリッドシステムとして運転行動のモデル化を行っ た.得られたドライバモデルを明示的に組み込んだ最適 化問題を混合整数計画 (Mixed Integer Programming) とし て定式化し,実時間で解くことで,ドライバの判断特性 や操作特性を明示的に考慮したアシストシステムを実現 したが,シミュレータを用いた仮想的な環境下での走行 データを基にした解析,アシスト設計にとどまっていた. 本研究では,上記の既存研究の手法を踏襲し,実車での 有効性検証を行う.具体的には,まず,小型の電気自動車を 用いて前方車追従運転を行い,ハイブリッドシステムの分 野で広く知られている PWARX(PieceWise AutoRegressive eXogeneous) モデル(2)により運転行動を数理的に表現す る.次に,構築されたモデルを基にアシスト量最適化問 題を実時間で実行し,モデル予測制御の手法を用いるこ とでシミュレータ上で実時間の減速アシスト実験を行い, その有用性を検証する.最後に,提案手法を実車に実装 後,同様のアシスト実験を行い,実車における有用性を 検証すると共に,シミュレータによる結果と比較検証す ることを目指す.本稿ではシミュレータによる実験によ り得られた結果について報告する. 2. 実験環境と想定タスク 2·1 想定タスク 本研究では,前方車追従タスクを 対象とし,下記の手順で実験を行う. 1. 平常走行(実車) 2. 運転モデル構築 3. アシスト走行(シミュレータ) 4. アシスト走行(実車) なお,本研究ではアシスト走行実験においては衝突回避 を目的とした,ブレーキによる減速アシストのみを対象 とする. 2·2 実験環境 本研究に用いる実車とシミュレータ 環境について述べる. 2·2·1 実車実験環境 本研究では,図 1 に示す超 小型電気自動車 COMS を使用する.COMS は最高速度 50[km/h] の一人乗り用電気自動車であり,後部に積載し た PC と PLC にはそれぞれ計測制御プログラムが実装され ており,10[msec] 毎に環境情報や操作量を記録し,アシス ト量指令を行うことができる.環境情報の取得には,レー ザレンジファインダ (LRF),慣性計測装置 (IMU),GPS, タイヤエンコーダを用いる.LRF より前方車との車間距 離が,IMU より自車速度,加速度,車体の姿勢角がそれ ぞれ取得できる.操作量は,ブレーキ,アクセル,ステア リングにそれぞれ取り付けられたポテンショメータより 取得する.車載 PC では,最適アシスト量を演算し,PLC を介してブレーキ,アクセル,ステアリングにそれぞれ指 令を行う.アクセルには直接電圧を入力し,ブレーキ,ス 5 Range Rate[m/s] 40 Range[m] 30 20 10 0 -50 0 0 -5 50 0 10 KdB 20 30 40 Range[m] 1 Pedal Operation 0.5 Fig. 1 Experimental vehicle 0 -0.5 -1 -2 テアリングはモータを使用して物理的に動作させる.走 行環境には,約 200[m] の直進道路を使用した.前方車に は 4 人乗り普通乗用車を用い,LRF の性能制約上,車間 距離が 30[m] 以内となるよう走行する. 2·2·2 シミュレータ環境 本研究で用いるドライビ ングシミュレータ (DS) は,三面スクリーンによる前方 180◦ の視覚呈示が可能なシミュレータであり,制御用, スクリーン表示演算用,最適アシスト量演算用の 3 台の PC で構成される.制御用 PC は,車両ダイナミクスの計 算,ステアリング,アクセル,ブレーキ操作情報の収集 を行う.車両ダイナミクスの計算には,バーチャルメカ ニクス社の CarSim を用いている.制御系 PC は環境情報 を最適アシスト量演算用 PC に転送し,計算されたアシ スト量を受け取る.本 DS では,16[msec] 毎に車両ダイ ナミクスの計算を行っている.想定環境として,片側二 車線で,無限遠に伸びる直進道路環境を用意した.前方 車速度や車間距離に制約はないが,実車実験をよりリア ルに再現するため,できる限り実車実験と同様の条件と なるよう走行する. 3. 運転行動のモデル化 本章では,個人適合型のアシストを実現するためのド ライバモデルについて,モデルの入出力,構造,そして 同定結果を順に示す. 3·1 モデルの入出力変数 前方車追従行動をモデル 化するための入出力変数を以下に示す.モデルの入力情 報として, • u1 :接近離間状態評価指標 (KdB)[dB](3) • u2 :前方車と自車の車間距離 [m] • u3 :前方車と自車の相対速度 [m/s] を,次に出力情報として, • y:自車加速度 [m/s2 ] を用いた. KdB はドライバの網膜に映る前方車の背面積の変化率 を表すリスク認知指標の一つであり,その有用性は文献 (4) においても認められている.u1 ,u2 ,u3 ,y はモデル化 を行う前に正規化された値を用いることとする. 3·2 PWARX モデルによる表現 前項の入出力の定 義に基づき,ドライバの前方車追従行動を PWARX モデ ルを用いて表現する.PWARX モデルは離散的な状態遷 Fig. 2 -1 0 1 Range Rate[m/s] 2 3 Data distribution of vehicle following task (without assist) 移と連続的なモデル (ARX モデル) を組み合わせたモデル で,ハイブリッドシステムの中でも代表的なシステム同 定用モデルの一つである.具体的には,3·1 節で述べた入 出力項 u,y が,多面体領域 Ui のどの領域に属するかに よってダイナミクスが切り替わる.また,人間が入力情 報を認知してペダル操作をするまでの遅れを 1 ステップ, ペダルの操作の後に車両の加速度に反映されるまでの遅 れを 1 ステップと仮定すると,式 (1) の様に記述すること ができる.ここで i は PWARX モデルのモード番号を表 し,θi は各モードの ARX モデルのパラメータである.以 降,計算負荷の問題からモード数を 2 とする.各モード の分離面パラメータを η とすると,式 (1) の 2 モード時 における U1 ,U2 のモード遷移条件は次式で表現される. yk = θi1 u1,k−2 + θi2 u2,k−2 + θi3 u3,k−2 +θi4 yk−1 if u ∈ Ui u ∈ U ⇔ S = η · u + · · · + η · y + η ≥ 0 1 1 1 1 4 5 u ∈ U ⇔ S = η · u + · · · + η · y + η < 0 2 1 1 1 4 (1) (2) 5 3·3 モデル化結果 2 章で述べた実車平常走行で得 られたデータを用いて,パラメータ同定およびモデル化 を行った.具体的なパラメータ同定の方法は割愛するが, 各データ点周りでの局所的なダイナミクスを表わす特徴 量に基づいて,k-means クラスタリングによりデータを分 (2) 割し ,最小二乗法やサポートベクターマシーン (SVM) によりパラメータ θ ,η を推定した.モード数を 2 とし たときのデータ分割結果を図 2 に示す.図 2 はそれぞれ, KdB–車間距離,車間距離–相対速度,相対速度–ペダル操 作量の関係を表す.また,推定されたパラメータ θ ,η を 表 1,表 2 に示す.図 2 より,Mode 1(赤) は相対速度が負 で,ブレーキ操作が多い特徴があることから,ドライバ にとって危険な状況である.そこで,Mode 1 を危険モー ドと定義し,Mode 1 に滞在している際に減速アシストを 行うことで,より安全な走行の達成を目指す. Table 1 Identified parameters (θ ) Mode 1 Mode 2 θ1 θ2 θ3 θ4 -0.0072 0.0104 -0.0092 -0.0467 0.2827 0.3632 0.7726 0.4769 • 相対速度の考慮 相対速度 u3 = 0 付近ではアシストが不要であると考 えられるため,閾値 vth を設け,減速アシストを抑制 する. u3,k > vth → ω1 = 0 Table 2 Identified parameters (η ) η1 η2 η3 η4 η5 2.1214 3.9095 -8.4369 -13.3302 -10.5862 4. アシストシステムの構築 3 章で示したドライバモデル,4·2 節で述べるアシスト 量の制約,4·3 節で示す前方車モデル,自車モデルを制約 条件として組み込み,混合整数計画 (MIP) として定式化 する.ここで,MIP は論理条件や非線形の拘束条件を扱 えない.そこで,論理条件を含んだドライバモデルを線 形不等式群で表現し,非線形である KdB の線形化を行い, 最適化問題を定式化する.また,モデル予測制御の考え 方を導入することで,リアルタイムに最適アシスト量を 計算する.以下ではアシスト量の最適化問題に用いる拘 束条件について説明する. 4·1 PWARX モデルの MLDS 表現 MLDS(Mixed Logical Dynamical System) とは,論理記述を含んだ動的 システム表現方法であり,論理式を線形不等式で表現す (5) ることが特徴である .紙面の都合上,詳しい説明は省 略するが,式 (1) のような PWARX モデルで表現された システムを線形不等式表現に変換し,MIP として記述で きることが知られている.上記の手法により,得られた ドライバモデルを拘束条件として組み込む. 4·2 その他の制約 • KdB の線形化 ドライバモデルの入力項 KdB は非線形な式である. そこで,KdB を車間距離と相対速度の 2 変数関数と みなし,1 次項までのテイラー展開を行うことで擬 似的に線形式にする. • アシスト量に関する制約 減速アシストの最小値を y− asm ,加速アシストの最大 値を y+ asM として,過度なアシストによる危険を抑制 する. + + − y− asm ≤ yas,k ≤ 0 , 0 ≤ yas,k ≤ yasM (3) • アシスト変化量に関する制約 + アシストの変化量に閾値 y− asth ,yasth を設け,アシス ト量の急激な変化による違和感を抑制する. − y− − y− as,k as,k−1 ≤ yasth (4) y+ − y+ ≤ y+ as,k asth as,k−1 • ペダル操作との整合 ペダル操作に反したアシストを行わないため,ドラ イバがアクセルを踏んでいるとき (pedal + ≥ 0) の減 速アシスト,ブレーキを踏んでいるとき (pedal − ≥ 0) の加速アシストを抑制する. pedal + ≥ 0 → ω = 0 1 (5) pedal − ≥ 0 → ω = 0 2 (6) 4·3 前方車モデルおよび自車モデル 4·4 節で述べ るドライバモデルの出力推定を行う数ステップ間におい て,前方車の動きを予測する必要がある.前方車の加速 度は一定であると仮定し,近似的に線形の前方車モデル の設計を行い,前方車の速度 p f ,k や位置 v f ,k の予測を行 う.また,同様に自車のモデルも速度 po,k や位置 vo,k と して近似的に表現すると以下のようになる.これらの予 測値を用い,車間距離や相対速度の予測値を求める. v f ,k = v f ,k−1 + a f · T p = p f ,k f ,k−1 + v f ,k−1 · T (7) v = v + y · T o,k o,k−1 total,k−1 p = p +v ·T o,k o,k−1 o,k−1 また,アシストは式 (1) の自車加速度 yk に加えられ,後 の動きに反映されるので,アシストが加えられた車両の 自車加速度 ytotal,k は,式 (8) のように表現する. + ytotal,k = yk + y− as,k−1 + yas,k−1 (8) 4·4 MIP としての定式化 ドライバモデル,アシス トに関する制約,前方車モデル,自車モデルを制約条件 として組み込んで MIP として定式化する.アシスト量を 決定する最適化問題は,以下のように定式化できる. アシスト量最適化問題 Given: Find: u1,1 , u2,1 , u3,1 , y2 , ω1 , ω2 (9) u1,2 , · · · , u1,K , u2,2 , · · · , u2,K , u3,2 , · · · , u3,K , − + + y3 , · · · , yK , y− as,2 , · · · , yas,K , yas,2 , · · · , yas,K (10) which minimize: K J = ∑ [{ω1 · ζi2 + y− as,i } 2 i=1 2 +{ω2 (u3,i − û3 )2 + y+ as,i }] (11) ドライバモデル (4·1 節) アシストに関する制約 (4·2 節) 前方車モデル,自車モデル (4·3 節) subject to: 以上の最適化問題を解くことで,KdB,車間距離,相対 速度,自車加速度の現在値を既知とし,ドライバモデル や自車モデルなどを用いることで数ステップ先までの各 車の状態量や,ドライバによる自車加速度を推定しつつ, ステップごとの最適アシスト量を求めることが可能とな る.ここで,ζ は ζ = u3 /u2 で表される危険度指標であ り,ζ の値が大きいほど危険な状態を表す.K は horizon と呼ばれ,最適化の対象となる区間ステップ数を表す. Table 3 Number of Data in Mode1(all data: 765) with assist 175 293 50 KdB without assist 0 -50 110 115 120 125 130 135 140 145 150 155 115 120 125 130 135 140 145 150 155 115 120 125 130 135 140 145 150 155 115 120 125 130 135 140 145 150 155 115 120 125 130 135 140 145 150 155 30 20 10 110 Range Rate [m/s] 5 0 -5 110 2 [m/s -0.5 -1 110 1 2 [m/s Accel. ] Assist ] 0 0 -1 110 time[sec] Fig. 3 Data profiles with proposed assisting system 5 Range Rate[m/s] 40 30 Range[m] 式 (11) について述べると,第一項,第二項は減速アシ ストに関係しており,過剰な減速アシストを避けつつ,危 険度を低減する.第三項,第四項は,加速アシストに関 係しており,過剰な加速アシストを避けつつ,前方車と の相対速度を 0 にする.ω1 は危険度指標,ω2 は相対速 度に対する重みであり,それぞれの値によって減速アシ スト,加速アシストの働きやすさを調節できる.重みが 大きい場合はアシストが働きやすくなり,逆に小さい場 合はアシストが働きにくくなる.ただし,実験において は衝突回避のみを目的とし,ω2 = 0,y+ as = 0 とする. 4·5 モデル予測制御の実現 モデル予測制御は, Receding Horizon と呼ばれる出力の予測区間および入力 を決定する区間を 1 サンプル時間ずつ先にずらしながら, (6) 最適化問題を解く手順を繰り返す手法である .まず,時 刻 t において観測された操作量や環境情報を用いて MIP を解き,K ステップ先までの最適アシスト量を計算する. その後,サンプル時間 T の間は同じ大きさのアシスト量 を加える.時刻 t + T で再び操作量や環境情報を観測し, 時刻 t の時と同様の計算やアシストを繰り返す.本研究 では,サンプリング時間 200[msec] 内で MIP の計算を終 えるために予測区間を 8step とした. Range [m] 40 20 10 0 -50 6. お わ り に 本研究では,既存研究の手法を用い,実車実験データ を用いてドライバモデルを作成した.前方車追従行動に おける運転行動を PWARX モデルとして表現し,構築し たモデルを用いたアシスト実験を行い,シミュレータ上 でその有用性を確かめた. 今後,モデル入出力変数の見直しや,入力項の遅れス テップ数の再検討によるモデル精度の向上を目指す.実 車にブレーキアシストシステムを実装し,シミュレータ と同様のアシスト実験を行い,シミュレータと実車の結 果比較から,実車での本手法の有用性を確かめる.また, モデルを利用したアシストシステムに対する依存を検出 し,アシスト量最適化問題に依存度を組み込むことで,よ -5 50 0 10 KdB 5. アシスト実験結果 3 章で作成したドライバモデルを制約条件に組み込み, 4 章で述べた手法でシミュレータにアシストシステムを 構築し,前方車追従行動に対するアシスト実験を行った. 解析結果を図 3,図 4 に示す.図 3 において,横軸は時 間,縦軸は KdB,車間距離,相対速度,アシスト量,自 車加速度を示す.また,図 4 はそれぞれ,KdB–車間距離, 車間距離–相対速度の関係を表す.アシスト走行では平常 走行に対して,減速アシストの影響により KdB が全体的 に減少し,Mode 1 の領域が狭まることが確認できる.同 時に,表2に示すように,Mode 1,すなわち危険モード の滞在が増加することもわかった.これはアシストの働 きにより安心感が増すことで,ドライバがより積極的な 追従行動を取っていることが原因と考えられる.本傾向 (1) は文献 で示されている結果と類似しており,実車での アシスト実験の成果が期待できる. 0 0 Fig. 4 20 30 40 Range[m] Data distribution of vehicle following task (with assist) り高度な支援が実現できると期待される. 本研究は,JST CREST 行動モデルに基づく過信の抑止 プロジェクトの一部として行われた. 文 献 (1) 三上晃司,奥田裕之,鈴木達也,田崎勇一,伊佐治和美, 津留直彦: ハイブリッドシステム論による前方車追従行動 におけるモデル予測型アシスト制御の実現, 計測自動制御 学会産業論文集, Vol.9, No.5, pp.29-36, 2010. (2) G.Ferrari-Trecate, M. Muselli, D. Liberati, M. Morari: A clustering technique for the identification of piecewise affine system, Automatica, Vol.39, pp.205-217, 2003 (3) 伊佐治和美,津留直彦,和田隆広,今井啓介,土居俊一, 金子弘: 前後方向の接近に伴う危険状態評価に関する研究 (第1報) −ドライバ操作量に基づく接近離間状態評価指 標の提案−. 自動車技術会論文集,Vol.38, No.2, pp.25-30, 2007 (4) T.Akita, T.Suzuki, S.Hayakawa, S.Inagaki: Analysis and Synthesis of Driving Behavior based on Mode Segmentation, Proc. of Int. Conf. on Control, Automation and Systems, pp.2884-2889, 2008 (5) A.Bemporad, M.Morari: Control of systems integrating logic, dynamics, and constraints, Automatica, Vol.35 pp.407-427, 1999 (6) 大嶋,小河:モデル予測制御−1−基礎編, 発展の歴史と現 状.システム/情報/制御,Vol. 46,No. 5,pp.286-293,2002.
© Copyright 2026 Paperzz