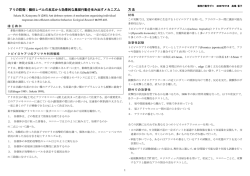
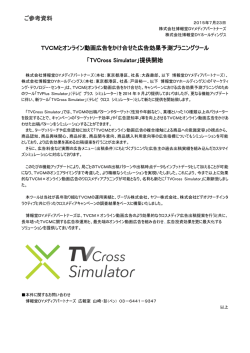
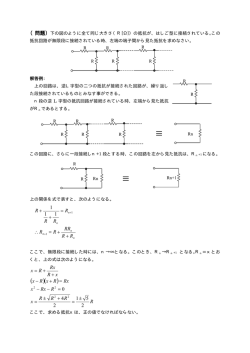
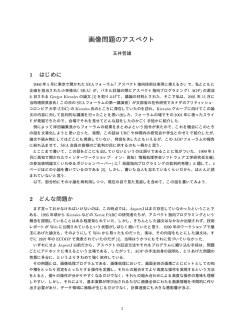
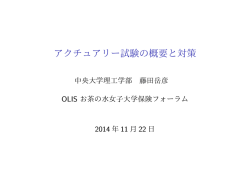
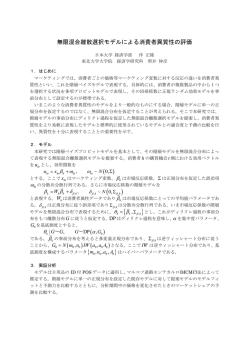
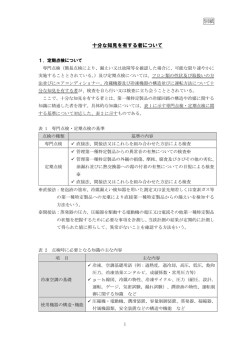
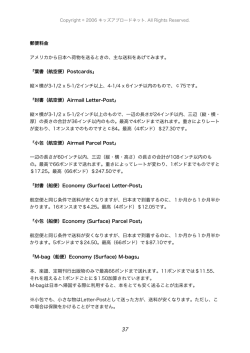
K7-66 宇宙往還機用フライトシミュレータの開発 -シャトルの操舵システムの構築と空力データの実装Development of flight simulator for a space transportation system Construction of control surface system and an algorithm of aerodynamic data ○八木進平 1, 小島一樹 1, 津川優太郎 2, 内田智規 2, 嶋田有三 3, 安部明雄 3 Sinpei Yagi1, Kazuki Kojima1, Yutaro Tsugawa2, Tomonori Uchida2, Yuzo Shimada3, Akio Abe3 * Abstract: In this study, the authors have developed a special-purpose flight simulator which can simulate a space transportation mission. The simulator consists of a control system for calculating the motion equation of the vehicle, and 3D visual system to output the scenery image. However, it didn’t build the interface system for generating the control surface signals from the command signals which are transmitted from a cockpit. Additionally, an algorithm for calculating the aerodynamic forces and moments was not model of space shuttle was not constructed. Therefore, in this paper, the authors show the system configuration of the flight simulator for the space transportation system, and the outline of the interface for the control surface and the algorithm for the aerodynamic model 1.はじめに 本研究室では,宇宙空間からの大気圏突入から着陸 までをシミュレートする宇宙往還機用フライトシミ ュレータを開発してきた.これまでに,スペースシャ トルのコックピットを模擬した操縦部,機体の運動計 算,窓外映像および計器への信号を出力するソフトウ ェアの構築・実装してきた. しかし,操縦桿から出力される信号を舵面信号に適 切に変換し,機体の運動計算部に受け渡すインターフ ェース,さらにはスペースシャトルの空力モデルの実 装がなされていなかった. 本稿では,宇宙往還機特有のエレボンの稼動範囲を 考慮した舵角と操縦桿との関係を構築し,さらに空力 モデルとしてスペースシャトルのモデルを適用した. 2.宇宙往還機用フライトシミュレータについて Figure.1 にシステムの構成図を示す.本システムは エレボン要素とエレベータ要素を持つ操縦桿からの 角度情報を dSpace 社製 DS1104 ボードに入力し,出力 される機体姿勢情報等を元に視界画面及び計器表示 を行うものである. 3.シャトルの舵面と操縦桿との対応 本研究でモデルとして取り扱うスペースシャトル は,エレベータとエルロンの機能を持つエレボンを有 している.スペースシャトルのエレボンは,Figure2. に示すように稼動範囲に制限があること,稼動範囲が 非対称であることが特徴である.ただし,Figure2.で 示したのは δ a ≥ 0 場合のみであり,Figure2.は本来,横 軸に対して対象な図形になる.本節では,エレベータ 要素とエルロン要素を持つ操縦桿から百分率で出力 された信号を,操舵信号へのスケール変換を行い,稼 働域を考慮した信号に変換するシステムについて述 べる. 15 20 −35 δ e [deg] −20 −40 0 15 20 Figure2. Operation range of elevon δ e ′ [%] δ = [δa′ δe′]T Flightsimulator MainPC Cockpit dSPBoard −100 100(20 deg ) r (θ ) θ 100 δ a ′ [%] Speaker CPU Projectors & Scree − 100(− 35 deg ) Instrument Figure3. Operation range of joystick and elevon Figure1. System configulation of Flight simulator 1:日大理工・学部・航宇 2:日大理工・院・航宇 3:日大理工・教員・航宇 952 Figure.3 に,操縦桿の稼働範囲と,エレボンの稼動範 囲との対応関係を示す.図中 δ a′ , δ e′ は,それぞれ操縦 桿から出力されるエルロン舵角,エレベータ舵角の指 令信号である. エレボンの稼動域を操縦桿の稼動域 に反映すると Figure3.の中の六角形になる.操縦桿の 位置が Figure3.の斜線領域外にあるときは,図 2 のエ レボンの稼動範囲外となる.そのため,次式を用いて 操縦桿からの指令信号の出力値を制限する. r (θ ) × r (θ ) (1) saturate ここで, r (θ ) は Figure3.の原点から六角形の各辺へ の距離を表す関数,δ = [δ a δ e ]T は操縦桿からの指令信 号を示す.次に,操縦桿の指令信号からエレボン舵角 信号への変換について述べる.Table1 に示すように, 操縦桿からの指令信号の範囲とエレボンの実際の稼 働域は一致していないため,次式を用いて修正する. δ = δ ′(θ ) × (csmax )(1 + sign(δ )) − (csmin )(1 − sign(δ )) 200 (2) ここで,cs max は舵面の最大値,cs min は舵面の最小値, δ ′(θ ) は操縦桿からの指令信号に(1)式で制限を設けた 信号である. Table1. Relation between joystick and control surface Control Joystick[%] Surface ' v=M Range of Control surface [deg] Elevator −100∼100 −35~20 Aileron −100∼100 −15~15 舵角と操縦桿の関係を示すブロック線図を Figure4. に示す.ここで, δ a,δ e は機体の運動計算部に出力さ れるエルロン舵角,エレベータ舵角の値である. C∞ Re ∞ (4) ここで,M はマッハ数,Re∞はレイノルズ数である, また C∞' は次式で定義される. 5 − ⎞ K⎛ T∞ ⎟ ⎜ ⎞ ⎛ ′ + × T T 122 . 1 10 (5) ' J ∞ C∞ = ⎜⎜ ⎟⎟ ⎜ 5 ⎟ ⎝ T∞ ⎠ ⎜ T ′ + 122.1 × 10− T ′ ⎟ ⎝ ⎠ ここで,K と J はそれぞれ実験定数であり,その値 は K=0.5,J=1.0 である.また,T‘は参照温度,T∞は一 様流温度,Tw は壁面温度である.C L BASIC , ΔC L は参考文 献[1]を用いて,上記変数を用いた線形補間により計算 する. 1 Lift coefficient CL [-] δ ′(θ ) = δ 空力係数は舵角に依存しない基本空力係数 CLBAISC と, 舵角に依存して変化する空力係数の和として定義さ れている.空力係数の変化量は舵角,迎角,横滑り角, 粘性パラメタ,動圧,マッハ数,高度,速度,角速度 の関数である.ここで,粘性パラメタは次式で定義さ れ,スペースシャトルの空気力を導出するのに必要と される[2]. 0.8 0.6 0.4 0.2 0 -0.2 0 100 200 300 400 Time [s] 500 600 Figure5. Time history of lift coefficient Figure.5 は以上の計算をもとに算出した揚力係数の 時間履歴である.これは本研究室で行ったスペースシ ャトルの自動着陸シミュレーション時の舵角を用い て計算したものである. Figure4. Relation between joystick and elevon 4.空力モデル 本節では,揚力係数を例に,フライトシミュレータ に実装する空力係数の計算方法について述べる.まず, シャトルの揚力係数は次式で得られる[1]. C L TOTAl = C L BASIC + [ΔC ELEVATOR + ΔC AILEROn ]ELEVON + ΔC BODY + ΔC RUDDER + ΔC SPEEED + ΔC Lα& FLAP + ΔC Lqˆ BRAKE α&c 2V (3) qc + ΔC L FLEX + ΔC LANDING + ΔC GROUND 2V GEAR EFFECT + ΔC SILTS POD 953 5.まとめ 本稿では,操縦装置の出力値をエレボン舵角に対応 させるプログラムの作成及びスペースシャトルの空 力係数の計算方法を示した.今後は,今回求めた揚力 係数の結果が妥当かどうかを検討する. 6.参考文献 [1] NASA Center for Aerospace Information (CASI).:Aerodynamic design data book. Volume 1M:Orbiter Vehicle STS-1,1980. [2] NASA CR-171860 Preoperational aerodynamic design data book. Vol. 1. Orbiter vehicle Appendices [3] 戸ヶ崎 由浩: 「宇宙往還機の自動着陸問題への適 応飛行制御系の応用と性能解析」日本大学修士論文 2005 年度 3 月
© Copyright 2026 Paperzz