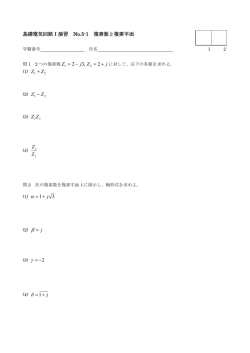
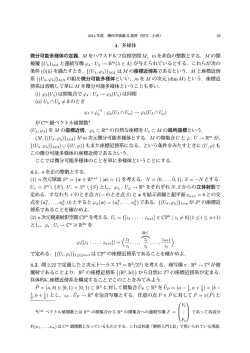
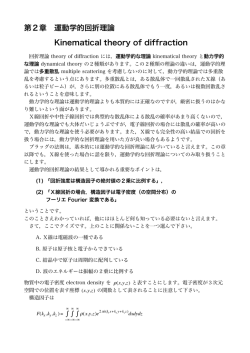
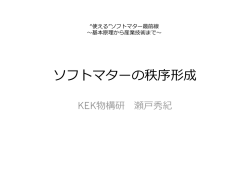
尺度空間 画像の導関数とスケール空間 (線形フィルタ処理) 1 尺度空間 画像の導関数(1/2) x 画像L( x, y )を微分可能な連続関数と仮定. 一次導関数 二次導関数 ∂L ( x , y ) ∂L ( x , y ) , Ly = Lx = ∂y ∂x ∂L y ∂L x ∂L x Lxx = , Lxy = , L yy = ∂x ∂y ∂y y 画像 L( x, y ) 画像L( x, y)の勾配 ∇L = (Lx , Ly ) T || ∇L ||= Lx + Ly , θ = tan −1 (Ly / Lx ) 2 2 方向v(方向ベクトル v)への画像 L( x, y )の勾配 Lv = v ⋅ ∇L 2 尺度空間 3 画像の局所座標系 画像 L ( x, y )の勾配方向とそれに垂 直な方向からなる座標 系 一次計量座標系 (first − order gauge coordinate s), あるいは レベル曲線座標系 この座標軸を u, vで表すと, ∇L = (cos α , sin α )T = v= || ∇L || u = v ⊥ = (sin α ,− cos α )T = 1 L2x + L2y 1 L2x + L2y ( Lx , L y ) T ( L y , − Lx ) T ただし, α = tan −1 (Ly / Lx ) 尺度空間 4 画像導関数と勾配 等レベル線 接ベクトル 接 平 面 原関数 勾配ベクトル ∇L y 一次導関数 x L y 二次導関数 ゼロ交差点 ∇L 接ベクトル 等レベル線 L ( x, y ) x 一次元関数に対する導 関数の例 二次元関数における勾 配の例 尺度空間 微分幾何:面の第一基本形 点( x, y )における微小変動(dx, dy )に対する画像L( x, y )の変化を dLとする. 左図中,ds = (dx, dy , dL)T で, n n:法線ベクトル s ( x, y , L ) ds s y sx ( x, y ) dx dy du du = (dx, dy )T dLは次式で表される. dL = Lx dx + Ly dy 従って, S (dL) 2 = ( Lx dx + Ly dy ) ⋅ ( Lx dx + Ly dy ) ⎡ Lx Lx Lx Ly ⎤ ⎡dx ⎤ = [dx, dy ]⎢ ⎥⎢ ⎥ L L L L ⎢⎣ x y y y ⎥⎦ ⎣dy ⎦ = duT Gdu G : 第一基本行列 5 尺度空間 微分幾何:面の第二基本形 位置( x, y )における微小変位 (dx, dy)に対する画像面上の 点s( x, y, L)の移動dsと,微小移動後の法線ベクトルの変位 dnとの内積を考える. ds = (dx, dy, dL) ,点sにおける T n 法線ベクトルは,n = s x × s y s x = (1,0, Lx )T , s y = (0,1, Ly )T より, n = s x × s y = (− Lx ,− Ly ,1)T dn = nx dx + n y dy ⎛ − Lxy ⎞ ⎛ Lxx dx + Lxy dy ⎞ ⎛ − Lxx ⎞ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ = ⎜ − Lxy ⎟dx + ⎜ − Lyy ⎟dy = −⎜ Lxy dx + Lyy dy ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ 0 ⎝ 0 ⎠ ⎝ 0 ⎠ ⎝ ⎠ sx dn n + dn s ds s + ds sy 6 尺度空間 7 微分幾何:面の第二基本形 以上のことから, ( d s ⋅ dn ) = −(dx, dy, dL) ⋅ ( Lxx dx + Lxy dy, Lxy dx + L yy dy,0)T = −( Lxx dx 2 + Lxy dxdy + Lxy dxdy + Lyy dy ) 2 ⎡ Lxx Lxy ⎤ ⎡dx ⎤ T = −[dx, dy ]⎢ ⎥ ⎢ ⎥ = − du B d u ⎢⎣ Lxy Lyy ⎥⎦ ⎣dy ⎦ ここで, ⎡b11 b12 ⎤ ⎡ Lxx =⎢ B=⎢ ⎥ ⎣b21 b22 ⎦ ⎢⎣ Lxy Lxy ⎤ ⎥ Lyy ⎥⎦ n sx B : 第二基本行列 この第二基本行列は,点( x, y)でのL( x, y)のヘッセ行列. sy 尺度空間 8 面の接ベクトルと曲率 n P C : 法線 nを含む平面 Pと 曲面 Sとの交線 C s sx n sy 接ベクトル st (t ) s ( x, y , L ) ds sx sy S C上の点を,s (t )と表す. 点sでの曲線Cへの接ベクトルst (t )は ( x, y ) dx dy du du = ( dx , dy ) T ds (t ) s (t + Δt ) − s (t ) = lim st (t ) = Δt →0 dt Δt 尺度空間 面の接ベクトルと曲率 曲線 Cの点 sにおける曲率 κは,接ベクトル st (t )によって dst (t ) || st (t ) × stt (t ) || 1 κ (t ) = ⋅ = dt || st (t ) ||3 s t (t ) と表される.この κで,面 Sの法線曲率 κ nが表現される. ・点 sにおける κ nは,平面 Pの向きの関数. ・点 sにおける κ nは,異なる2つの向き で最大,最小化. 最大,最小曲率 κ 1 , κ 2を,点 s における主曲率 ( principal curvature )と呼ぶ. 9 尺度空間 画像面の平均曲率とガウス曲率 主曲率 κ 1 , κ 2は,第二基本行列 Bの固有値として求めら れる.また,各固有値 に対する固有ベクトル を,主軸 ( principal direction )と呼ぶ. これより,κ1 , κ 2は, det(B − κI ) = κ 2 − (b11 + b22 )κ + (b11b22 − b12b21 ) = 0 の根となり,次の関係式を満たす. κ1 + κ 2 = tr ( B) κ1 ⋅ κ 2 = det( B) 平均曲率Hとガウス曲率Kは, κ1 + κ 2 1 H= = tr ( B ) 2 2 K = κ1 ⋅ κ 2 = det( B ) 10 尺度空間 導関数の差分近似 画像 L ( x , y )の n 次導関数 L x ( n−1 ) ( x + Δ x , y ) − L x ( n −1) ( x , y ) ∂ L x ( n−1 ) ≡ lim Lx( n ) = Δx → 0 ∂x Δx L y ( n−1 ) ( x , y + Δ y ) − L y ( n −1) ( x , y ) ∂ L y ( n −1) ≡ lim Ly(n) = Δy → 0 ∂y Δy 導関数の差分近似(1 つの例) Lx( n ) ( x, y ) ≅ L x ( n −1) ( x + Δ x , y ) − L x ( n −1) ( x , y ) Δx Δ x ←1 = L x ( n −1) ( x + 1, y ) − L x ( n −1) ( x , y ) L y ( n ) ( x, y ) ≅ L y ( n −1) ( x , y + Δ y ) − L y ( n −1) ( x , y ) Δy = L y ( n−1) ( x , y + 1) − L y ( n −1) ( x , y ) Δ y ←1 11 尺度空間 差分フィルタ L x ( n −1 ) ( x , y ) Δx Lx ( n ) ( x, y ) L y ( n −1 ) ( x , y ) Lx( n) = Δx ⊗ Lx( n−1) Δy L y ( n ) ( x, y ) Ly( n) = Δy ⊗ Ly( n−1) の関係で表される線形フィルタΔx, Δyを一次の差分フィルタ と呼ぶ. Lx ( x, y ) = ∑ Δx(k , l ) ⋅ L( x − k , y − l ) = L( x + 1, y ) − L( x, y ) k ,l Ly ( x, y ) = ∑ Δy (k , l ) ⋅ L( x − k , y − l ) = L( x, y + 1) − L( x, y ), k ,l より,Δx(k , l) , Δy (k , l )のインパルス応答とマ スク表現は, Δx(n1, n2 ) 1 ‐1 n2 n2 Δy(n1, n2 ) −1 n1 ‐1 −1 1 n1 Δx 1 1 Δy 12 尺度空間 13 差分フィルタ 同様に, Δ2 x = Δx ⊗ Δx, Δ2 y = Δy ⊗ Δy とすれば,Δ2 x, Δ2 yは二次の差分フィルタ n2 n2 1 −2 1 1 n1 Δ2 x(n1 , n2 ) −2 ⎛ 遅延器 z1 , z2 ⎜ ⎜を,Δ2 x, Δ2 yに ⎜ ⎜ 接続 ⎝ −1 n1 1 Δ2 y(n1 , n2 ) −1 ⎞ ⎟ ⎟ ⎟ ⎟ ⎠ n2 n2 1 −2 1 1 n1 −2 n1 1 Δ2 y(n1 , n2 ) Δ2 x(n1 , n2 ) 1 2 Δ2 x Δ2 y 0 1 0 1 ‐4 1 0 1 0 ラプラシアンフィルタ 1 2 Δ2 x 1 1 Δ2 y 尺度空間 14 曲面多項式表現と導関数近似 注目画素 p0 ( x0 , y0 )と8近傍点 pi ( xi , yi ), (i = 1,8)の画素値 zi , (i = 0,8) p0 注目画素p0の近傍を2次の多項式 f ( x, y ) = a1 x 2 + a2 y 2 + a3 xy + a4 x + a5 y + a6 で近似. Fa = z の関係より,係数ベク トル a は, a = ( F T F ) −1 F T z ただし, ⎡ x0 2 y0 2 x0 y0 x0 y0 1⎤ ⎛ z0 ⎞ ⎛ a1 ⎞ ⎜ ⎟ ⎜ ⎟ ⎥ ⎢ 2 2 ⎜ z1 ⎟ ⎜ a2 ⎟ ⎢ x1 y1 x1 y1 x1 y1 1⎥ , z = ⎜ ⎟, a = ⎜ ⎟ F =⎢ ⎥ M M L ⎜ ⎟ ⎜ ⎟ ⎢ ⎥ ⎜a ⎟ ⎜z ⎟ ⎢x 2 y 2 x y x y 1 ⎥ 8⎠ ⎝ 6⎠ ⎝ ⎣ 8 8 8 8 8 8 ⎦ このとき, 注目画素p0における 導関数は多項式係数 から得られる. (例)ラプラシアン: ∂2 f ∂2 f ∇ f = 2 + 2 ∂x ∂y = 2(a1 + a2 ) 2 尺度空間 ガウス関数とその導関数(1/3) •ガウス関数による平滑化 σ : スケールファクタ ガウス関数 ⎛ x2 + y 2 ⎞ ⎟ G( x, y;σ ) = exp⎜⎜ − 2 2 ⎟ 2πσ ⎝ 2σ ⎠ 1 画像 f ( x, y )の平滑化 : G ( x, y; σ )による畳込み処理 L ( x , y ; σ ) = (G ⊗ f ) 平滑化画像L( x, y; σ )の微分 ∂G ∂L ∂ Lx = = (G ⊗ f ) = ⊗ f = Gx ⊗ f ∂x ∂x ∂x ∂L ∂ ∂G Ly = = (G ⊗ f ) = ⊗ f = Gy ⊗ f ∂y ∂y ∂y 15 尺度空間 ガウス関数とその導関数(2/3) 16 平滑化画像 L ( x, y )の微分(続き) ∂Ly ∂Lx ∂Lx = Gxx ⊗ f , Lyy = = Gyy ⊗ f , Lxy = = Gxy ⊗ f Lxx = ∂x ∂y ∂y ガウス導関数 ⎛ x2 + y2 ⎞ ⎛ x2 + y2 ⎞ y ⎟⎟, G y = − ⎟⎟ exp⎜⎜ − exp⎜⎜ − Gx = − 4 2 4 2 2πσ 2σ ⎠ 2πσ 2σ ⎠ ⎝ ⎝ ⎛ x2 + y2 ⎞ ⎛ x2 + y2 ⎞ x2 − σ 2 y2 −σ 2 ⎟⎟ ⎟⎟, G yy = exp⎜⎜ − exp⎜⎜ − Gxx = 6 2 6 2 2πσ 2σ ⎠ 2πσ 2σ ⎠ ⎝ ⎝ x ⎛ x2 + y2 ⎞ ⎟⎟ exp⎜⎜ − Gxy = 6 2 2πσ 2σ ⎠ ⎝ xy 平滑化画像L( x, y )の微分 ガウス導関数による畳込み 尺度空間 ガウス関数とその導関数(3/3) ガウス導関数の例 G ( x, y ;1.0) Gx ( x, y ;1.0) Gxy ( x, y ;1.0) Gxx ( x, y ;1.0) G y ( x, y ;1.0) G yy ( x, y ;1.0) 17 尺度空間 ガウス導関数と画像の畳込み ガウス導関数による画像の畳込み L( x, y;2.0) Lx ( x, y;2.0) Lxy ( x, y;2.0) Lxx ( x, y;2.0) Ly ( x, y;2.0) Lyy ( x, y;2.0) 18 尺度空間 19 ガウス関数のカスケード構成 ⎛ t2 ⎞ exp⎜⎜ − 2 ⎟⎟とおくと,(ガウスカーネル) g (t ; σ ) = 2πσ 2 ⎝ 2σ ⎠ G ( x, y; σ ) = g ( x; σ ) ⋅ g ( y; σ )と表される. 1 ガウス関数G ( x, y; σ )は分離型フィルタの一種であり,そのインパ ルス応答hG ( x , y ;σ )は,g (t ; σ )に対応するインパルス応答hg ( t ;σ )によって, 以下のようなカスケード接続で表現可能. hG ( x , y ;σ ) hg ( x;σ ) hg ( y ;σ ) 尺度空間 ガウス導関数のカスケード構成 ガウス導関数についても Gx ( x, y; σ ) = g x ( x; σ ) ⋅ g ( y; σ ), G y ( x, y; σ ) = g ( x; σ ) ⋅ g y ( y; σ ) Gxx ( x, y; σ ) = g xx ( x; σ ) ⋅ g ( y; σ ), G yy ( x, y; σ ) = g ( x; σ ) ⋅ g yy ( y; σ ) Gxy ( x, y; σ ) = g x ( x; σ ) ⋅ g y ( y; σ ), M hGx ( x , y ;σ ) hg x ( x;σ ) hg ( y ;σ ) hG y ( x , y ;σ ) hg ( x;σ ) hg y ( y ;σ ) M M 20 尺度空間 ガウス核の離散化とマスク表現例 ガウスカーネルの線形フィルタマスク表現 8 6 4 2 0 2 4 6 8 g (x; 5 ) 回転 8 6 4 2 0 g ( y; 5) 2 4 6 8 g( ⋅ ; 5) g ( ⋅ ; 10 ) g ( ⋅ ; 15 ) 21 尺度空間 ガウス核導関数の離散化例 g t (⋅ ; 5 ) g tt (⋅ ; 5 ) g t (⋅ ; 10 ) g tt (⋅ ; 10 ) g t (⋅ ; 15 ) g tt (⋅ ; 15 ) 22 尺度空間 画像の多重スケール表現(1/3) • 画像の多重スケール表現の背景 画像計測 :あるアパーチャを持つ計測装置に依存 ある場合は、高解像度での計測を、またあるとき は粗い解像度で広い範囲を計測したい。 最適アパーチャサイズを決めておくことは困難 アパーチャサイズ(画像のスケール)をパラメータとして、 複数のスケール画像を表現する方法が考案 Multi-scale Representation 23 尺度空間 画像の多重スケール表現(2/3) • 初期の多重スケール表現 Quad Tree(四分木表現)(1971) 均一性に基づいて画像を再帰的に分割し,木構造 で表現.(均一とされた領域は木の葉として表現) 初期の濃淡画像分割に利用:”Split-and merge”法 Pyramids(ピラミッド表現))(1981) サブサンプリングとスムージングの組合せ Coarse-to-fine表現法 ピラミッド表現:現在も利用. 24 尺度空間 25 画像の多重スケール表現(3/3) • ピラミッド表現 入力画像I:2 K × 2 K ,I ( K ) = I スムージングフィルタ :等方性,分離可能性 を仮定 一次元処理として以下 のように表現 f (256 × 256) ( k −1) ( x) = N (k ) c ( n ) f (2 x − n) ⋅ ∑ n=− N 例えば, N = 1の場合, c ( n) = ( 14 , 12 , 14 ) N = 2の場合, c ( n) = ( 201 , 14 , 52 , 14 , 201 ) (128 × 128) (64 × 64) (32 × 32) L 尺度空間 スケール(尺度)空間とは • 四分木表現・ピラミッド表現: サイズ(スケール)を縮小(疎化)することで多重スケー ル表現する方法。 • スケール空間: 連続なスケール変数を持ち、全てのスケールで同じ画像 サイズ(同じ空間サンプリング数)を保持する多重ス ケール表現法。 1次元信号に対するガウシャン・スケール空間:1983 因果性: スケール変数の増加に伴って、新たなレベル面 (局所的最適値)が出現することはない。(1984) LGderivative ( x, y; σ ) = Gderivative ( x, y; σ ) ⊗ f ( x, y ) :画像f ( x, y )のGderivative 尺度空間表現 26 尺度空間 σ =0 σ = 9 .0 27 スケール空間の例 σ =1 σ = 8 .0 σ = 2 .0 σ = 3 .0 σ = 4 .0 σ = 6. 0 σ = 7. 0 σ = 5 .0 σ x y LG 尺度空間
© Copyright 2026 Paperzz