科学・技術の世界:ロボットは感情を持つか
ーロボット(人工知能)は学べるか?
• 5/12 情報理工学コース(旧CS,現 情報理工学)(原口)
5/19 情報理工学コース(旧CS,現 情報理工学)(有村)
6/9 情報理工学コース(旧CS,現 情報理工学)(工藤)
• 本日分のミニレポート: 1週間後の5月19日火曜12:00
• 分量は 400字程度で可(たくさん書きたい人はそれ以上でもOK)
•
「ロボット(人工知能)は学べるか?,感情を持てるか?」を,
講述された内容に即して論じること.
● 提出先: 教務 レポートボックス 担当教員 原口誠(情報科学研究科)
原口分の講義資料は http://www-kb.ist.hokudai.ac.jp/~mh-j/robot.pdf
感情を持てたことの証,もしくは結果
物語を理解する,
理解・要約の仕方は様々.
人によって悲しく,人によっては楽しく
そしてそれを身体的に表現する
文書要約・理解
• 文書の全体像把握に向けた重要文抽出のために
概要をつかむための視点を追加
猪が国を荒らしました。
文書は複数の話題から構成
誰も猪のいる森には入りませんでした。
森
森
猪
王様は猪を倒すように頼みました。
兄と弟は森を探しました。
森
兄・弟
兄・弟
単語による文の関係
兄は弟の命を狙っていました。
話題
兄は弟を襲いかかりました。
話題間の構造
橋
兄は弟の遺体を橋の下に埋めました。
ひとりの羊飼いが歩いていました。
羊飼い
羊飼いが橋で骨を拾いました。
橋
話題をつなぐ役割に重要度
文脈語
羊飼いは骨で笛を作りました。
橋
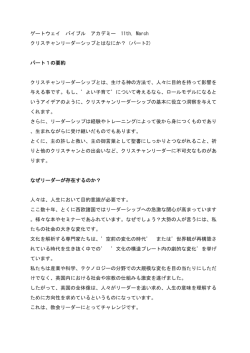
シーンへの分節化(セグメンテーション)
1
2
3
4
5
6
7
A
A
A A
B B
B
B
C C
C C
D
D
E
E E
F F
F F
k =3
Point to compare the
left and right k
sentences
類似度
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
0
2
4
6
8
10
12
基準点
出現する単語の出方(パターン、分
布)が位置により変化する。同じ話題
の中では、その変化は少なく、異なる
話題・シーンへ移ると、その変化は極
大化 (類似性極小)
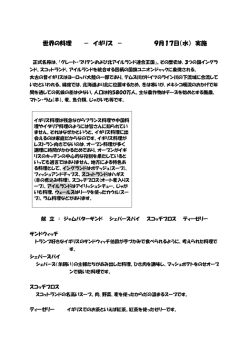
文脈的な言葉: トピックを繋ぐ
トピック:中心語彙群:…
兄と弟のシーン
w1
兄と弟は森を探しました。
兄
兄は弟の命を狙っていました。
兄は弟を襲いかかりました。
兄は弟の遺体を橋の下に埋めました。
中心的な役割を演じ
るもの、人、で、相互
に共起しあう語彙群
w2
弟
共起グラフにおけるクリー
ク(密結合な部分)
目立たない語もシーンを繋ぐことがある
場所,文脈等を表す言葉は,省略されることが多い
シーンの最初で述べておけばわかる....
OR 次のシーンに移動する前に一言述べておく ...
多くの中心語彙と結合される、
中心語彙ではない言葉
猪が国を荒らしました。
誰も猪のいる森には入りませんでした。
森
森
猪 -森 -兄・弟
兄・弟 -橋 -骨(笛)
猪
王様は猪を倒すように頼みました。
兄と弟は森を探しました。
森
兄・弟
兄・弟
兄は弟の命を狙っていました。
兄は弟を襲いかかりました。
話題連結語 (キーグラフ)
キーワード: 中心語彙群と話
題連結語の2種類
橋
兄は弟の遺体を橋の下に埋めました。
ひとりの羊飼いが歩いていました。
羊飼い
羊飼いが橋で骨を拾いました。
橋
羊飼いは骨で笛を作りました。
橋
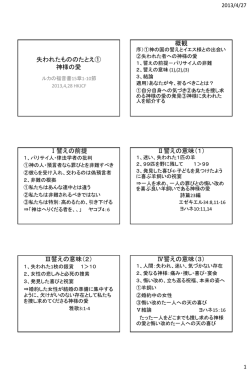
マルコフ連鎖による、確率的重要度の付与: PageRank モデル
近
接
性
の
重
み
兄、弟、森
共起語を介して、文から文
へ渡り歩く: マルコフ過程
兄、弟、橋
q = (1 − α )Mq + αp
猪が国を荒らしました。
猪
誰も猪のいる森には入りませんでした。
森
森
王様は猪を倒すように頼みました。
兄と弟は森を探しました。
森
兄・弟
兄・弟
兄は弟の命を狙っていました。
羊飼い、橋、骨
話題連結語を含む文に一
定の重要度を与える
骨、王、歌う
兄は弟を襲いかかりました。
橋
兄は弟の遺体を橋の下に埋めました。
ひとりの羊飼いが歩いていました。
羊飼い
羊飼いが橋で骨を拾いました。
橋
羊飼いは骨で笛を作りました。
橋
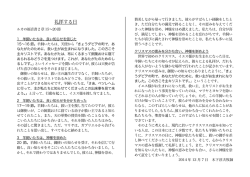
新聞社説の要約: 文脈語の重要性
圧縮率 12/33 = 36 %
2.
8.
会談では,○○半島の恒久的平和体制の確立が,
主要議題になる.
これを平和の状態に変えるには
「平和協定」の締結が不可欠だ.
感情の身体表現
モーション
データベース
標準動作
重たい気分で歩いていた。
悲しさ、憂鬱さの身体表現
体がだるいとき、膝を痛めたと
きも、外形的にはそうなる。
変換
「歩く」
動作データ: real robot と同じ座標系
• 動作データ M はフレームF i の列
M = ( F ,, F ,, F )
i
1
F = { p ,θ ,,θ }
i
i
0
i
1
j
K
i
22
pelvis
j+1
– Pi0: 腰の基本座標系に関する位置
– Θij: 関節jの方向(体節の姿勢: 相対座標系)
– 間節(に筋肉駆動のモータがついていたとして、力やトル
クの値を、座標系列から計算できる : ロボット工学におけ
る動力学)
F1
F2
Fi
状態列とエネルギー,実コスト
d
W = P = Fv
dt
t2
W = ∫ Fvdt
t1
関節を動かしたときに生じる
力: Newton-Euler 法など
体節の動きは隣接した体節
に影響を及ぼし …
コスト: 仕事量: エネルギー使用量
コストは,状態系列(力,速度)を時間に関して足しこむ
(トルク,角速度)
人工知能を用いたモーションプランニング
標準的な動作
負荷のかかる(たくさんのエネルギーを要する)関節に対して、負荷分散すべく、
隣接した関節を少しづつ動かし、負荷分散に寄与する動作系列があればそれを挿入する
F1
例:
膝のコストが最大
g(F0 ,F1)
見積もりコスト: 体節の相互作用を無
視した近似的なコスト
h(FV,F1)
実コスト
Fv
腰を曲げる
F0
g(F0 ,FV)
If g(F ,F ) > g(F , F ) +h(F ,F )
0
1
0
V
V
1
FVを経由状態の候補とする
筋骨格系パラメータが異なる場合に適用
標準キャラクタ S
強度パラメータを
変えた場合の処理: 強い
人はそれなりに、弱い人
もそれなりに ….
Sの仕事/Sの強度
膝が弱い人の歩行にお
いて、膝への負荷を減ら
すプランニングを行う
悲しげに、重たげに
見えるだろうか ….
膝の弱い人
= Tの仕事/Tの強度
目標キャラクタ T
まとめ
• 感情の身体表現の可能性(認知的には重要だが、情報処理技術とし
ては未発達。要素技術・理論: ロボット工学。ヒューマノイド工学、3D
表現)
• シナリオ、要約の可能性(言語処理の中心課題。現在進行中。要素技
術・理論: 計算言語学、グラフ理論、データマイニング,機械学習)
• シナリオ、要約に基づき、アニメーション表現する可能性(開発途上。
試験的研究はあるが、これといった決定版は未だない
© Copyright 2026 Paperzz