Paper
zz
Explore Categories
Log in
Create new account
No category
物理学概論 (`14年版)
Download
Report
複素関数論演習問題解答
(2) 空気抵抗がある場合の運動方程式は
中間テストの救済措置(追加レポートについて)
ドレンかご - 栗原建材産業;pdf
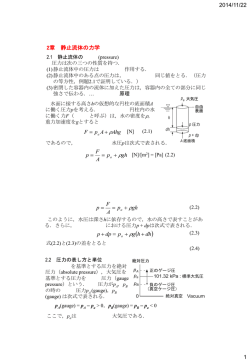
第2章 静止流体の力学
Document 5388243
newton1
© Copyright 2026 Paperzz
About Paperzz
DMCA / GDPR
Report