計測自動制御学会論文集,Vol. 41, No. 10, pp. 797-802, 2005.
計測自動制御学会論文集
(
)
等価入力外乱推定による外乱除去性能の向上
余
錦 華 ・大 山 恭 弘
小 林
裕 之 ・忻
欣
£ £ £ ££
えで,その推定値を融合した新しいサーボ系を構築し,外乱
はじめに
除去性能の向上を図る。
近年,制御系の制御性能を高めるために,外乱を推定す
る手法が数多く提案されている ∼ 。しかし,提案手法の
ほとんどは出力の微分値を必要としている。一方, ∼! は
出力の微分値が必要ではないが, ," は未知入力外乱にラ
ンク条件を課し,# は外乱の最大値に関する情報が必要であ
り,! は制御対象の逆モデルが外乱推定に直接用いられてい
た。これらの問題点を解決するために,$ は外乱曲率モデル
に基づく手法を提案した。この手法は出力の微分値を必要と
しないだけではなく,不安定なゼロ・極消去を引き起こす恐
れのある制御対象の逆モデルも直接に用いていない。しか
し,外乱推定に制御対象の状態が必要であった。
外乱抑制問題においては,制御入力を用いて外乱を抑制
しなければならないため,外乱そのものを推定するよりは,
新しいサーボ系
本章では,等価入力外乱を定義し,その存在性を示した
後,等価入力外乱の推定器を従来のサーボ系に挿入し,新し
いサーボ系を構築する。
等価入力外乱
に示す以下のような線形時不変な制御対象を考
える。
% & %
% & %
上式において,
とする。
' % ' %
()
制御入力チャンネルにおいて,出力に同じ効果をもたらす等
d(t)
Bd
u(t)
B
価的な入力信号(本論文ではこれを等価入力外乱とよぶ)を
推定することが望ましいと考えられる。
本論文では,まず,等価入力外乱を定義し,次に,制御対
.
x(t)
象の出力を用いた外乱推定の新しい手法を提案する。そのう
!" # $%& ' % (
)% * + "
)%
(,' %+ )
(,' %+ )
東京工科大学バイオニクス学部 東京都八王子市片倉町
岡山県立大学情報工学部 岡山県総社市窪木
s−1I
x(t)
C
y(t)
A
*
−
d(t)
u(t)
B
.
−
x(t)
−1
s I
A
−
x(t)
−
y(t)
C
* - . & ' +
/$(
0 d(t)
Plant
Internal Model
.
xR (t)
xR (t)
BR
s−1I
r(t)
−
Disturbance
Estimator
u f (t)
u(t)
KR
−
AR
Bd
~
d(t)
F(s)
.
x(t)
B
s−1I
y(t)
x(t)
C
A
^
d(t)
T
B
BTB
−
.
^
x(t)
B
State
Observer
L
−1
s I
^
x(t)
−
C
^
y(t)
A
KP
$1 %&' %
この制御対象に関して,以下の標準的な仮定をおいておく。
[仮定 ]
% は可制御であり,% は可観測である。
本 論 文で は 1 入力 1 出 力(()(*)の 場合 ,す な わち ,
& と & の場合だけ考える。外乱は制御入力
と違うチャンネルから印加される可能性があるため, と
の値および次元は違うこともあり,特に,外乱の入力チャ
ンネルは 以上になる可能性もある。一方,外乱は制御入
力チャンネルより印加される(
)とすると,制御対象
は以下となる。
+% & +%
+% & +%
' % ' +%
(")
したがって,等価入力外乱を以下のように定義する。
& ,,状態 % & , とする。外乱
% に対する制御対象 % の出力を % とし,外乱 +% に
対する制御対象 %" の出力を +% とする。すべての ,
に対して,+% & % が成り立つならば, +% は % の等
価入力外乱と呼ぶ。
% により生じる出力が % と
なるならば, という概念に基づいて,
制御入力チャンネルにおける等価入力外乱 +%
もし,外乱
が構築できることが知られており,以下の補題を得る。
%
に印加される外乱
%
により
に属す場合,その等価入力外乱
は必ず存在する。
生じる出力が +%
-%
& -% ' % ' .% -% / (#)
+% および等価入
が成り立つ。また,制御対象 %" の状態 +
力外乱の真値 % について,
+%
& +% ' .% ' +% /
(!)
が成り立つ。ここで,
+%
& -% %
(0)
と分解し,それを式(!)に代入して整理すると
-%
& -% '% ' +% ' % % (1)
【定義】 制御入力 %
[補題 ] 制 御 対 象
展開する。 # において,状態オブザーバに関して,
等価入力外乱の推定
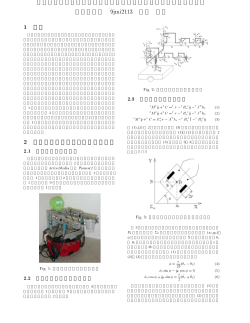
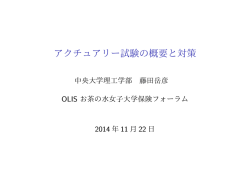
本論文で提案する新しいサーボ系の構成を
に示す。
を得る。一方,逆システムの実現アルゴリズム
より状態
% を生成する制御入力 2 % は存在し,以下を満たす。
%
& % ' 2 %
上式を式(1)に代入し,等価入力外乱の推定値を
-% & +% ' 2 %
(3)
($)
として整理すると,
-%
& -% ' .% ' -% /
(4)
を得る。式($)と(4)は,等価入力外乱をもつ制御対象の
状態を常にオブザーバの状態と同じく,
-% とした場合,実
状態との差は等価入力外乱の推定誤差に帰着できることを
意味する。
& ,,式 %#
と %4 より
テムにおいて, と は状態フィードバックゲイン,
-% & .% -% / ' % % (,)
が得られる。さらに, -% をローパスフィルタ % に通す。
ここで, % は外乱推定の周波数帯域を選定する働きを持
するローバスフィルタである。
5%
このシステム構成は,従来のサーボ系(内部モデル,状態オ
ブザーバおよび状態フィードバック)と等価入力外乱を推定
する外乱推定器とを融合したものと考えられる。このシス
はオブザーバゲイン, % は外乱推定の周波数範囲を選定
以下では等価入力外乱を持つ制御対象 %" を対象に議論を
つ。したがって,最終的に得られた等価入力外乱の推定値
は
5 %
& % - %
()
計測自動制御学会論文集
第
巻
第
号 年 月
F(s)
G(s)
~
d(t)
^
d(t)
A
.
∆x(t)
∆x(t)
s−1I
B
−1
u(t)
B
KP
.
x(t)
s−1I
BT
BTB
−C
L
C
−BR
x(t)
.
xR (t)
A
s−1I
xR (t)
AR
KR
'% ' -& 1 ' +
5 % と - % はそれ
により与えられる。ただし,ここで,
ぞれ信号
5%
と
-%
のラプラス変換である。
備考:等価入力外乱を推定するので,得られた等価入力外
乱の印加チャンネルは,実際の外乱の印加チャンネルとは違
う。そのため,一般的に同一次元オブザーバを用いる必要が
ある。また,外乱が存在する場合,その影響により推定され
た等価入力外乱をもつ制御対象の状態は実際の制御対象の
状態とは異なる。
外乱除去
等価入力外乱の推定結果ともとのサーボ系の制御則を融
合すると,以下の制御則
& % 5%
(")
が得られる( #)。この新しい制御則はシステムの外乱
%
除去性能を向上させる。本制御則は従来の手法に見られない
以下の特徴がある。
スフィルタの設計に的を絞り具体的に検討する。
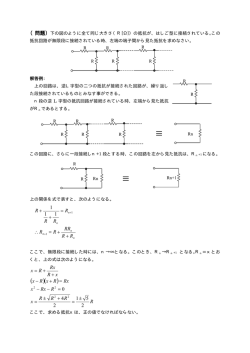
状態オブザーバのゲイン とローパスフィルタ % は,
システムの安定性が保証されるように設計しなければなら
ない。システムの安定性を考える場合,%
% & , とおき,また,2% & -% %
テムを
( " ) 外乱の推定結果を既存のサーボ系の制御則と直接
のように描きなおす。このとき,制御対象は
%
& % ' %
となる。式 %# ,%" および上式より
2% & % 2% ' 5%
来のサーボ系に外乱推定器をプラグインした構造と考えら
れるため,その構造自身は非常に簡単でわかりやすい。特徴
+%
に収
束することを保証し,また,適切なローパスフィルタ %
により -%
5% -% となることが保証される。した
がって, 5% は
+%
(#)
(!)
を得る。一方,式 %, は
-% & 2% ' 5%
と等価であるため,%! と %0 より
%
融合することにより,外乱除去性能が容易に向上できる。
特徴 について,本論文で提案する新しいサーボ系は従
が
として,シス
(0)
5%
から
-%
までの
伝達関数が
( ) システム構成が非常にシンプルである。
" について,適切なオブザーバの設計は, -%
& , および
の適切な近似となる。
状態オブザーバとローパスフィルタの設計
このシステムでは,現代制御理論における分離定理(閉
ループ系の極を制御に関するものと観測に関するものに分
離できる) もそのまま成り立つ。すなわち,状態フィー
ドバックゲインの設計がオブザーバのゲインおよびローパ
スフィルタの設計と独立にできるという特徴も持っている。
以下では,状態フィードバックゲインがすでに設計されてい
るとし,システム安定性の立場から状態オブザーバとローパ
& . % / & % . % / (1)
で与えられ,スモールゲイン定理 より以下の定理を得る。
《定理 》 状態フィードバックにより系を安定化するフィー
ドバックゲイン . / に対して,
% % (3)
ならば,制御則 %" は制御系 # の安定性を保証する。
備考:提案するサーボ系の安定性は二つの部分に分けて考
えることができ,すなわち,状態フィードバックサーボ系の
安定性と条件 %3 である。条件 %3 におけるパラメータは
と % だけであるため,ローパスフィルタで系全体の安
定性を保証しなければならない外乱オブザーバ の設計に
比べ,本論文で提案する手法は非常に簡単である。
外乱を除去する角周波数領域
6 & 7
/$(
0 において,ローパスフィルタ % は
% 6
と選ぶことが望ましい。そのため,式 %3 を満たすような
y(t)
&
&
' .6/ は電機 子コイルの抵 抗,
.;/ はコイ
ルのインダクタンス, .</ と .=/ は定数,
% .=/ は電 機子を流 れる電流 ,% .</ はモー タに印
加 す る 制 御 電 圧 , % .</ は 電 圧 外 乱 で あ る 。状態 を
% & . %
% % / と選ぶと,式 % における
ここで,
(",)
-1 + '
(4)
を満たすように選べばよい。ここでシステム
を構築し,それに対して,以下のようなスカラーパラメータ
, を含む状態フィードバック
& を考える。もし % が最小位相系ならば,
. % / & ,
,
,
,
& , & , , , ,, & , & 各パラメータは以下のようになる。
が成り立つ完全制御 を達成する は存在すること
が知られている。ここで,. % / は % の
分子の一部であることに注目すると,十分に大きな は,す
6 に対して,% を十分に小さくすること
べての ができることがわかる。したがって,完全制御という概念に
基づいて,条件 %3 を満たす適切な と % を求めるこ
とができ,その設計手順を次節にまとめる。
設計手順
,
この制御対象において,% & & & "
& & & とし,
目標入力を単位ステップ信号とすると,
設計アルゴリズム:
従来の手法(たとえば,最適制御)により状態
外乱を除去する角周波数帯域 6 を選択し,式
式 %4 が成り立つように,十分に大きな を
を満たすローパスフィルタ % を選択する。
%
%
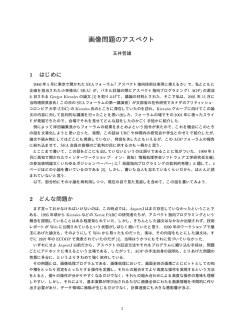
数値例
本章では,いままで説明した新しいサーボ系の設計法を二
本指ロボットハンド の位置決め制御に適用し,その有効
性を示す。二本指ロボットハンドは,
に示すように,
%
&
二本の指の中,一本が固定され,もう一本がプーリベルト機
構と 89 モータにより駆動される。そのダイナミックスは
次式により与えられる。
%
' % & % ' %
ただし,ここで, % ./ はハンドの移動距離, .:/ は
可動部の質量, .:/ は粘性摩擦係数, % ./ はモー
タの駆動力, % ./ は力外乱である。モータの電機子の
とする。
前章の
, #,
("")
,
, #,
," "% , " % ,
'! % ", , #,
("#)
" 0 節に示した設計手順に従い,新しいサーボ系
を設計する。まず,外乱を無視し,プラントと内部モデルを
含んだ以下の拡大系を構築する 。
Æ%
Æ %
動特性が無視できない場合は,次式のように表せる。
' % & % % ' %
% & %
(")
, #,
,
0 "% , ' "0 !% ,
&
'"0 1% , 選択し,対応するオブザーバゲイン を計算する。
& % & , & となる。また,外乱を
フィードバックゲイン と を設計する。
が最小位相系とな
ンとローパスフィルタを設計することができる。ここで,
計アルゴリズムは以下となる。
,
るため,前章で提案した設計法を用いてオブザーバゲイ
以上の議論をまとめると,本論文で提案するサーボ系の設
%$
Immobile finger
Mobile finger
オブザーバのゲイン は
% % ., '
DC motor
Belt-pulley
mechanism
($)
&
'
%
ただし,ここで,
,
,
,
Æ %
Æ%
Æ %
("!)
|1/F(jω)| (solid), |G(jω)| (dotted) [dB]
計測自動制御学会論文集
40
第
0
−40
−2
10
10
−1
10
0
1
10
10
ω [rad/s]
2
3
10
& % %'
Æ %
& % %'
&
Æ %
である。次の評価関数
Æ %
& ,, ,,
4
10
と求められる。次に,
ザーバゲイン
&
00!44 ,#413 434,!,
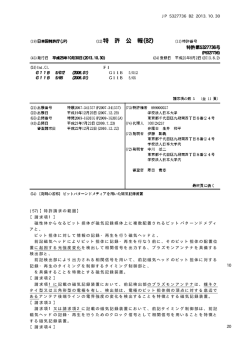
が得られる。ちなみに, % と %
のゲイン特性は
に示しており,明らかに,安定条件 %3
が満たされ,
設計されたサーボ系は安定である。
シミュレーション結果を
Æ%
Æ %
' Æ %
, に示す。 3 にお
& の時点より印加し,
出力が定常状態に入った後, & , の時点より外乱 %""
と %"# を系に印加した。
いて,ステップ目標入力信号を 外乱推定を行わない場合,従来のサーボ系は外乱をある程
&
度抑えることができるが,それを除去することはできない。
を最小にするフィードバックゲインが
/&.44334
&
% % ' %
& , & を最小にするように設計する。 を式 %4 が満たされるよ
うに調整した結果, & , となり,それに対応するオブ
& % %'
Æ %
そのため,定常状態において大きな追従偏差(ピークピー
4#"!4 "$"##$ ,,,,,/
ク値:,,!!,)が残った。その場合の制御入力を同図に示
& ,, として 6 を選び,
1.5
r (dotted), y (solid)
ローパスフィルタを
1.5
r (dotted), y (solid)
ρ=1
ρ=1000
ρ=100000
−20
.
に対して,次の評価関数
23 ' 23
号 年 月
! & ,,
% &
! ' 第
と選ぶ。また,最適なフィルタゲイン は,システム %",
|1/F(jω)|
20
Æ%
巻
1.0
0.5
1.0
0.5
0.0
−0.5
0.0
0
10
20
30
40
0
10
20
30
40
0
10
20
30
40
−0.5
0
10
20
30
40
10
~
d
d u (dotted), d f (solid)
10
5
0
0
−10
−5
−10
0
10
20
30
40
10
u
u
10
0
0
−10
−10
0
10
20
30
40
t [s]
% - ' + %
t [s]
% - ' + %
/$(
0 す。一方,本論文で提案する手法を適用することにより,系
の追従特性に大きな改善が見られた。そのシミュレーション
結果( $)から,過渡応答および定常応答において,外
乱の影響は除去され,特に定常状態における定常追従偏差
のピークピーク値は ,,,"4 まで減少し,外乱推定しない
場合のわずか 3> となっている。推定された等価入力外乱を
$ に示す。同図からも外乱を抑制する分だけ制御入力が
増加し,外乱を有効に抑えていることがわかる。
おわりに
本論文では,サーボ系の外乱除去性能を向上するために,
等価入力外乱を推定する手法を提案し,それに基づき,新し
いサーボ系の構築手法を示した。従来の手法に比べ,本手法
28983
)岩井善太,井上昭,川路茂保:オブザーバ,コロナ社 28993
:)平井一正,池田雅夫:非線形制御システムの解析,オーム社
28963
)! - ' , 5 4D% >+
> A )&% , ' A )&
% # 896
283
7)木村英紀,杉山治:完全制御と完全観測を用いたロバスト制御
系の設計法 計測自動制御学会論文集 87786
2893
6), = !- ' +5 $%+
/4$ ? - $ ' / >&& >
-# ,+ !' &&' ((
9 2
3
)#A A-5 >&&' )&% $ E (% F
? ? E /%&%F )
*
2883
は以下の特徴がある。
出力測定値の微分情報は必要としない。
不安定なゼロ極消去は生じない。
システムの設計は,状態フィードバック,オブザーバと
[著
余
錦
ローパスフィルタという二つの部分に分離して行うことが
提案した手法の有効性は二本指ロボットの位置決め制御によ
り検証された。
文
! "
"#
: :7:9 2
3
大
山 恭
弘
88 /#>$
897
年東京工業大学大学院理工学研究科博士課
程修了。同年(株)アドバンストコントロールラ
ボラトリ取締役就任。産業用ロボットコントロー
ラ,
コントローラ,制御工学学習機器の開発
に従事。 年東京工科大学工学部講師を経て,現
在東京工科大学バイオニクス学部教授。福祉制御
機器,ロボティクス,オンライン教育システムに
関する研究に従事。電気学会,日本
学
会の会員(工学博士)。
$
8
A
小
# 6)@ B ' 4 5 ' 4' )+ % 2
3
)B $ # ' ' ? @ 5 > - + ' + + " $ :
9888 2
3
9)0! @ )% ' 4 5 > - >&& (% ' ," ? + % " : :9:97
2
73
8)A, ! C 4 ' , 5 /
A % 6
96 28863
) ? ? $ ' *'5 /
' ) & 8:
8 28863
)> /'5 %
" ' (' &
8:
/(((
献
)4 $ ' 0 5 ' /& (% $ % 6 76
28893
)4 ! ' ,0 *5 )&% # %
- - /& :
78 28893
:)/; ! ' < )< = <5 > (% ' ,
+ $ ? % 969 28883
) ) 4 ' @ !5 (% '
1 ' % %
9 7:67 2883
7)$ A ' ! *5 /?% ' '
? + )+ A %/ %
89:
システム構成は非常にシンプルである。
考
介]
年中国中南大学工学部制御工学卒業,
年東京工業大学大学院理工学研究科博士課程修了。
同年東京工科大学工学部講師,
年同助教授,
現在東京工科大学バイオニクス学部助教授。おも
に制御理論応用,繰返し制御,エキスパート制御,
ロボティックス,インターネットの制御応用に関
最優秀論文賞受賞。
する研究に従事。 年
の会員(博士(工学))。
電気学会,
できる。
参
華
者 紹
林 裕
之
886
年東京工業大学大学院理工学研究科修士
課程終了,
年同大学大学院理工学研究科博
年東京工科大学バイオニクス
士課程修了。
学部助手,現在に至る。ロボット工学および制御
工学分野の研究に従事。電気学会,日本ロボット
学会の会員(博士(工学))。
忻
欣
:
:
867 9 6
8:
9
年 月 日生。 年中国科学技術大学卒
業, 年東南大学大学院自動制御理論および応用
年東京工業大
専攻博士課程修了,工学博士。
学博士(工学)の学位取得。その間,
年大
阪大学留学。 年東南大学助教授, 年東京工
業大学
派遣研究員, 年同助手を経て
年岡山県立大学助教授となり,現在に至る。
非線形制御,ロバスト制御,ロボット工学に関す
る教育研究に従事。
などの会員。
87
(?)
8
/(((
88:
86
© Copyright 2026 Paperzz