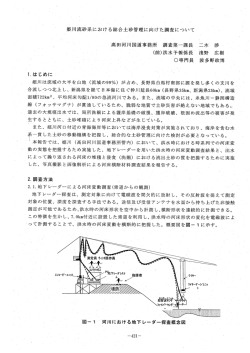
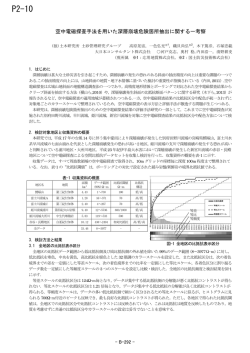
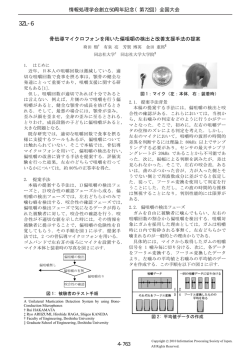
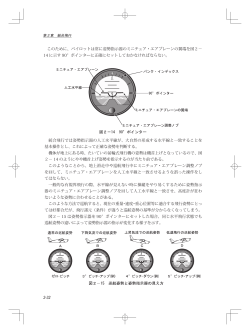
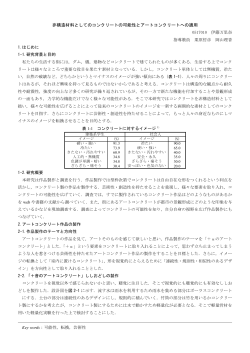
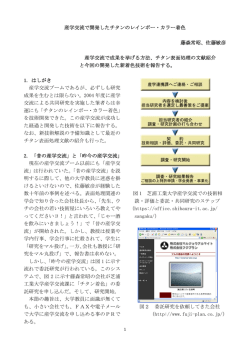
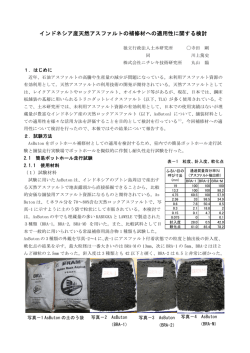
移動マニピュレータによるプラットフォームとアームの双方向協調 山本研究室 上水 光士 緒言 移動マニピュレータは,機動性の高い移動プラットフォー ムと,それに搭載された多関節ロボットアームから構成さ れる.そのため,固定式のマニピュレータに比べ,非常に広 範囲な作業領域をもつだけでなく,プラットフォームの機動 性を積極的に作業に導入することにより,固定式のマニピュ レータの作業と比較して作業時間の短縮など作業性の向上 が可能となる.このようにアームと移動ロボットの協調動 作を用いたシステムは,製造業における搬送やメンテナン スのほか,福祉や災害救助など様々な分野での活躍が期待 される.従来から移動マニピュレータに関する研究は数多 くされているが,力学解析や制御方法,および移動経路の 計画を容易にするために,アームと移動プラットフォーム をそれぞれ独立したシステムとして扱う場合が多い.この 場合,アームと移動プラットフォームのどちらかだけが動 いている状態になり,実際の作業では非効率的である.ま た 本のアームだけで実行可能な作業には限界があり,人 間の腕のように 本のアームが備わることにより作業の範 囲が飛躍的に広がる.そこで本研究では, 本の多関節アー ムを 台の移動プラットフォームに搭載した双腕型の移動 マニピュレータの双方向協調のシステム開発をすることを 目的とする. 双腕型移動マニピュレータの構成 ¾º½ ハードウェアの構成 ¾º¿ マニピュレータの構造概要 システムのモデリング ½ ½ ½ ½ ÚÚ ½ Ì ½ ¾ ¾ ¾ ¾ ¾ ÚÚ ¾ Ì ¾ Ú Ú Ú ÚÚ Ì Ú Ú ½½ Ú ¾¾ ½ 式 は 本のアーム,式 は移動プラットフォーム の運動方程式を表している.式 , における右辺第 項は,移動プラットフォームの加速度運動が各アームに及 ぼす動的干渉力を,式 の右辺第 , 項はアームの加速 度運動により,移動プラットフォームが受ける動的干渉力 をあらわす. 本研究で使用した双腕型移動マニピュレータの脚部に相 当する移動プラットフォームは 輪独立駆動型の車輪型移 動ロボットで, 社製 を使用してい る.双腕マニピュレータの各アームは,肩に 自由度,肘・ 手首に 自由度を有し, 本のアームを支える架台の昇降 に 自由度の計 自由度を持っている.移動マニピュレー タの概観を図 に示す. 双腕型移動マニピュレータの模式図 図 に双腕型移動マニピュレータの模式図を示す.ここで ¼ における車輪間の中点の座標 ¼ ¼ , は移動プラットフォーム進行方向が 軸と成す角度, Ö と Ð は移動プラットフォームの右輪と左輪の回転角, は 車輪の半径, は車輪間距離である.移動プラットフォー ムは,車輪を有するため式 のホロノミックな制約と式 , の非ホロノミックな制約を受ける. ¾º¾ 双腕型移動マニピュレータ マニピュレータの関節設定 今回使用した双腕マニピュレータは片腕 自由度ずつと, 架台の昇降が 自由度の計 自由度を有する.各リンクの 座標系の設定を図 に示す. ¼ は慣性座標系 Ö Ð ¼ ¼ ¼ ¼ Ö Ð 移動プラットフォームは,車輪を有するため式 の左 右の車輪の回転角の差によって,移動プラットフォームの 進行方向の角度が決定されることを示す.式 はプラット フォームの瞬間的な横方向の速度成分がゼロであることを 表している.式 は車輪と床の間にすべりを生じないと Ì いう制約を与えている.ここで ¼ ¼ Ö Ð とすると非ホロノミック拘束条件式 は次のように表 せる. ここで ! ¾ ¾ Ö Ö " をその列ベクトルが非ホロノミック行列 ヌル空 間に存在するような の行列であるとすると, は を満足する.拘束条件式 より,速度ベク トル も非ホロノミック行列 のヌル空間に存在しなけ ればならない.つまり ½ ¾ である.こ Ì が存 のとき次式を満たす滑らかなベクトル ½ ¾ 在する. 式 を時間微分すると次のようになる. Ì Ú Ú Ú Ì ÚÚ Ì Ú ½½ Ì Ú ¾¾ 式 を用い,式 に左から Ì を掛けると 式 と式 に式 を代入したものを整理すると 双腕型移動マニピュレータのモデルとして次式が得られる. Ì Ú Ì Ú Ì Ú ½ ½ ½ ½ ½ Ú ¾ ¾ ¾ Ú Ì Ú Ì Ú ½ ½ ½ Ú ¾ ¾ ¾ Ú Ì Ú Ú ½ ¾ Ì ½¾ 制御システム 協調方法 双腕マニピュレータと移動プラットフォームの協調方法 は,まず双腕マニピュレータが初期状態(可操作性最大)時 の両手先の中点に移動プラットフォームの参照点を設定す る.双腕マニピュレータが目標に向かって手を伸ばすと,移 動プラットフォームは手先の中点に設定された参照点を追 従するように移動する.手先が目標に到達すると手先はそ の位置を維持しながら、参照点が手先位置と一致するまで 移動プラットフォームは移動する.参照点と手先位置が一 致した時点で,双腕マニピュレータが初期状態(可操作性 最大)の状態になり,双腕マニピュレータと移動プラット フォームはともに動作を停止する. 動作シミュレーション %&'$()*+ を使用して先で述べた協調方法の動 作シミュレーションを作成した.このシミュレーションはマ ニピュレータに目標位置 13 座標 を与えると,マニピュ レータは目標を追うようにアームを伸ばす.アームが動くこ とで両手先の中点に設定した参照点が動き、アームを可操 作性最大,つまり初期状態と同じ状態になるように動作す るプラットフォームはこれを追従するように動き出す.アー ムは目標位置に近づくにつれて伸びていたアームが初期状 態と同じ状態になるように動き,その時点で結果てきにプ ラットフォームも動作を停止する.つまり,目標位置に到 達するとアームと移動プラットフォームは初期状態と同じ 姿勢で止まる.シミュレーションの事例を図 に示す. 制御システム 双腕型移動マニピュレータの制御システムは,マニピュ レータと移動プラットフォームがそれぞれ別のパソコンで制 御され,両者の協調動作に必要な情報が 台のパソコン間で ボードを介して交換される.マニピュレータの制御には #$ ボード %% 社製 を用い,ソフトウェアには %&', $()*+, , *-( . +/ 0 を用いる.移動プラット フォームの制御には無線イーサネットを用い,&)1 上の 2 言語プログラムによって制御する.ソフトウェアには $ 0/ 用いる. 制御システムを図 に示す.まずマニピュレータの現在 の姿勢情報を 2 により読み取り、その情報を 2 から 2 に送信される. 2 から移動プラットフォームにマニ ピュレータの姿勢情報に応じた制御命令を生成し、無線を 介して送信する.次に移動プラットフォームの現在の位置 情報が 2 に返される.その情報を 2 から 2 に送ら れ, 2 からマニピュレータに位置情報に応じた制御命令 が生成され、送られる.この制御システムによりマニピュ レータとプラットフォームの双方向協調が可能となる。 シミュレーションの事例 結言および今後の課題 双腕型移動マニピュレータの双方向協調の制御システム の開発, %&',$()*+ による動作シミュレーショ ンを作成した.今後の課題として具体的な作業を想定して のシミュレーションの考察,実機による双方向協調の制御 システムの開発,実機による動作確認などが挙げられる.
© Copyright 2026 Paperzz