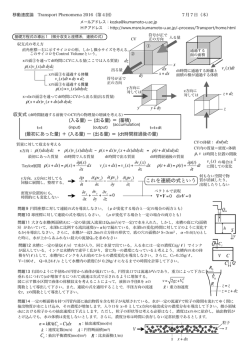
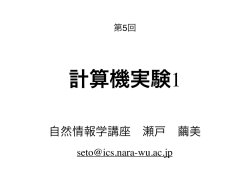
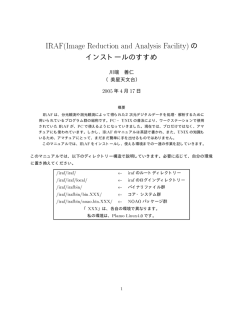
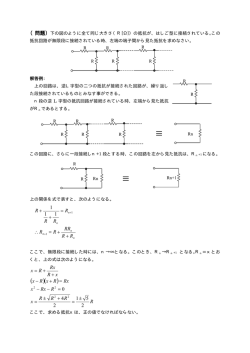
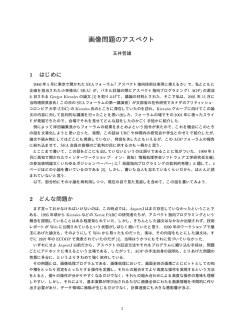
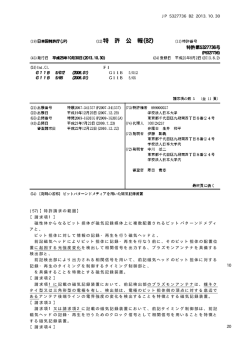
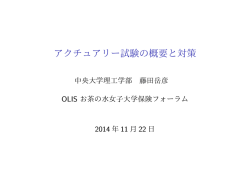
第6章 流体の運動方程式の記述 - 161 - 第6章 流体の運動方程式の記述 すでに、第 5 章において流体は連続体であり、流体内の微小部分に無数に集 まっている粒子の塊、すなわち微小な体積要素に注目して、体積要素内での質 量保存の考え方を基礎として、連続の式の導出方法を学んだ。ここでは、微小 な体積要素に作用する力のつりあいを考え、主としてニュートンの運動の第2 法則を用いて、流体の運動方程式を記述する方法を学ぶ。 6.1 流体運動の記述方法 流体の運動の記述にはつぎの2つの方法がある。 1)ラグランジュ(Lagrange)の方法 この方法は、特定の流体塊に注目し、その位置における、速度、圧力、温度 などの変化を時々刻々追跡する方法である。例えば、時間 t 0 で、直交座標系 x, y, z において x0 , y0 , z 0 にあった流体が時刻 t t a において位置 xa , ya , z a に 移動した場合、 x a f 1 ( x0 , y 0 , z 0 , t ) ; y a f 2 ( x0 , y 0 , z 0 , t ) ; z a f 3 ( x0 , y 0 , z 0 , t ) (6.1) として、 t t a における新しい移動後の座標位置を求める方法である。質点の力 学では多くの場合この方法が用いられる。 2)オイラー(Euler)の方法 空間内のすべての位置における速度、圧力、温度などを座標の関数として表 す方法である。例えば、任意の時刻 t に任意の位置 x, y, z にある流体塊の速度成 分 u, v, w 、圧力 p 、温度 T および密度 を、それぞれつぎのように与える。 u g1 ( x, y, z, t ) ; v g 2 ( x, y, z, t ) ; w g 3 ( x, y, z, t ) p g 4 ( x, y, z, t ) ; T g 5 ( x, y, z, t ) ; g 6 ( x, y, z, t ) (6.2) 熱流体の場合、特定の流体塊を追跡しながらその位置を確認するのは極めて困 難であるから、一般的にオイラーの方法を用いることが多い。 (第 5 章ではこの 方法の一部を学んだ。) 6.2 運動する流体の加速度 ここでは、運動方程式をたてるために必要となる加速度について考えること にする。 - 162 - 6.2.1 直交座標系における流体の 加速度 図 6.1 において、オイラ ーの方法に基づき、点 A を 時刻 t に通過した流体塊の 加速度を表現してみる。(以 下、ベクトル量は斜体大文 字または赤色で表す。) ・点 A の速度ベクトルを VA =V x, y, z, t VB Z VA B A y X 微小時間 dt 後、点 A の流 体は点 B を通過した。そ 図 6.1 のときの速度を VB =V x dx, y dy, z dz, t dt 流体の運動軌跡 とする。ただし、 dx, dy, dz は時間 dt 経過後における x, y, z 方向への移動量。 ・移動量 dx, dy, dz について、 dt 時間後の移動量は、 x, y, z 方向の速度成分を u, v, w とすれば、 dx udt ; dy vdt ; dx wdt (m ) である。 ---------------------------------------------------------------------------------------------------------注)ここで、つぎのようなテイラー展開公式を思い出す。すなわち関数 V (x) の dx 離れた位置における値 V ( x dx) は、 V ( x dx) V ( x) dV ( x) dx dx (以下高次の項は省略) ---------------------------------------------------------------------------------------------------------したがって、その差 V ( x dx) V ( x) は、 V ( x dx) V ( x) dV ( x) dV ( x) dx udt dx dx すると、加速度α x , y , z は、 V x dx, y dy, z dz, t dt V x, y, z, t dt dt 0 lim 1 V V V V lim dt dx dy dz x y z dt 0 dt t V V V V u v w t x y z - 163 - (6.3) となる。式(6.3)の右辺第1項は局所加速度(local acceleration)とよばれ、 流れの非定常性による速度変化である。第2~第4項は対流加速度(convective acceleration)とよばれ、流体が移動したことによる速度変化分である。 ・実質加速度(substantive acceleration) 実質加速度はつぎのように表記されることもある。 DV Dt ここで、式(6.4)中の D Dt は (6.4) D u v w Dt t x y z (6.5) を意味し、 D を実質微分(material derivative)といい、流体塊が保有する物 Dt 理量の時間変化率を表している。 ☆ 加速度α x , y , z の各軸 ( x, y, z ) 方向成分はつぎのようになる. x Du u u u u u v w Dt t x y z (6.6) y Dv v v v v u v w Dt t x y z (6.7) z Dw w w w w (6.8) u v w Dt t x y z z Vz Vθ 6.2.2 円筒座標系における流体の加速度 1)円筒座標系について Vr 円筒座標系は、図 6.2 に示されるように、 3つの座標 (r , , z ) が用いられる。一般的 によく用いられる直交座標系 ( x, y, z ) と円 筒座標系 (r , , z ) との関係はつぎのように y なる。 θ x r cos y r sin zz x r (6.9) 図 6.2 2)円筒座標系における流体の加速度 - 164 - 円筒座標系の速度 円筒座標系において (r , , z ) 方向の単位ベクト θ z e t dt ルを er , e , ez とし、微小時間 dt 後に流体は座 標 (r , , z ) から、 r dr, d , z dz に移動した e ez e (t ) とする。 から、 d への移動は単位ベクトル d e と e の変化を誘起することに注意する必要が r e t dt ある。すなわち、図 6.3 から明らかなように、d r d →0のとき d の方向は e の方向に一致し、e er (t ) er の方向は er の方向の反対向きに一致するように r なる。したがって、これらは近似的に、 er er t dt er (t ) e d (6.10) 図 6.3 単位ベクトルの変化 e e (t dt ) e (t ) er d (6.11) Z と表される。さらに、微小な位置の変位 dr , d , dz と微小時間 dt の関係は、つぎの V+Δ V Vz+dVz ようになる。 dr Vr dt rd V dt Vθ +dVθ dz Vz dt (6.12) dz Vr+dVr 以上のことを前準備として用いると、任 意の時間 t における速度ベクトル V VZ V Vr ,V ,Vz は、単位ベクトルを用いて表 z すと、図 6.4 に示されるように V Vr er V e Vz ez Vθ Vr (6.13) となり、微小時間 dt 後の速度を V V とすれば、 V は次式となる。 dθ X θ r y r+dr V Vr er V e Vz ez Vr er V e Vz ez (6.14) - 165 - 6.4 円筒座標系における速度 さらに、式(6.14)で示された r 、 方向の単位ベクトルは角速度 V r で方向 が変化するので、 er e d V r e dt;e er d となる。つぎに、速度の微小変化 V Vi V r e dt;e r z 0 (6.15) r, , z,t は、全微分をとることによって Vi V V V dt i dr i d i dz t r z (6.16) であり、添字 i は i r , , z に適用される。さらに、dr Vr dt , rd V dt , dz Vz dt で あるから、式(6.16)はつぎのように書き表される。 V V Vi V V Vi i Vr i Vz i dt ただし、 i r , , z r r z t (6.17) ☆結論 以上から、結局、円筒座標系における加速度αは V V 2 V V V V r r z V V , V V , V V (6.18) r z t r t r t となる。ここで、 V Vr V Vz r r z (6.19) -------------------------------------------------------------------------------------------------------☆6.2.2 円筒座標系の研究課題 1.円筒座標系 (r , , z ) において、 t 時間後の速度変化 V が (r , , z ) 方向の単位 ベクトルを er , e , e z とするとき、 V Vr er V e Vz ez Vr er V e Vz ez で表されることを証明せよ。 2.円筒座標系における加速度 の各軸成分 r 、 および z を次式 V V 2 V V V V r r z V V , V V , V V r z t r t r t V Vr V Vz r r z - 166 - から求めよ。 --------------------------------------------------------------------------------------------------------6.3 連続の式 6.3.1 直交座標系における連続の式 この式はすでに第5章で質量保存の法則から導出した。結果のみを以下に要 約して記述しておく。 ☆2 次元圧縮性非定常流の連続の式 u v (5.14) 0 t x y ☆3次元圧縮性非定常流の連続の式 u v w 0 t x y z (5.15) あるいは、流体の速度ベクトルV を用いて、 div ( V ) 0 t と表される。 ---------------------------------------------------------------------------------------------------------☆コーヒーブレイク:ベクトル関数 A の発散とは ベクトル関数を A x, y, z とするとき、 divA は A Ay Az divA x x y z (6.20) で表され、 A の発散と言い、これを上式のように divA で表す。ここでは上式の ベクトル A の成分が、 Ax u ; Ay v ; Az w と考えればよい。 ---------------------------------------------------------------------------------------------------------6.3.2 円筒座標系における連続の式 円筒座標系における軸対称流れで、 V 0 の場合、連続の式についてはすで に第5章で学び、その結果はつぎのようであった。 1 Vr r Vz 0 t r r z (5.16) そこで、この節では、V ≠ 0 の一般的な場合について連続の式を導こう。図 6.5 に示したように、扇形の微小要素における質量の変化を考える。まず、 - 167 - ☆ r 方向の質量流量の変化は、 入る質量流量: Vr rddz ( Vr ) r dr ddz 出る質量流量: Vr r 差し引き( r に関する高次の項を省略して)、 ( Vr ) rddz Vr drddz r ( Vr r ) drddz r z dθ (6.21) V z ( V z ) dz z dr V である。 ( V ) d Vr dz ☆ 方向の質量流量変化は 入る質量流量: V drdz 出る質量流量: ( V ) V d drdz V V z θ Vr ( Vr ) dr r r 差し引き: ( V ) drddz (6.22) 図 6.5 円筒座標系の連続の式 となる。 ☆ z 方向の質量流量変化は 入る質量流量: Vz rdrd ( V ) z dz rdrd 出る質量流量: V z z 差し引き: ( V z ) rdrddz z (6.23) となる。単位時間当たりの微小要素の質量変化は、時間を dt として、 rdrddz t (6.24) 結論として、円筒座標系の連続の式はこれらをまとめて 1 vr u 1 ( Vr r ) 1 ( V ) ( Vz ) 0 0; t r r x t r r r z - 168 - (6.25) ( V 0 ) ( V 0 ) となる。参考までに、軸対称流れの連続の式を右側に示した。 dy 6.4 流体に働く力 熱流体の微小要素には流体要素に直 接働く力(重力、遠心力、電気力、ロー レンツ 力など )として、 質 量力 (body z 密度ρ dz Fy force)と、隣り合う流体要素から面を通 じて働く力(圧力、粘性力など)とし て面積力(surface force)が考えられる。 この中で質量力としての圧力はすでに 第 2 章で学んだ。ここでは圧力以外の 質量力および面積力について学ぶ。 Fx dx Fz F(x,y,z) y x 図 6.6 質量力 6.4.1 質量力(体積力加速度) 図 6.6 に示すように、単位質量当たりに働く質量力を F x, y, z とすれば、微 小直方体 dxdydz に働く力はつぎのようになる。 (6.26) Fdxdydz ちなみに、質量力 F の x, y, z 成分が であれば、質量力は F (0,0, g ) zx xx zy yz xz と書き表される。 6.4.2 面積力 図 6.7 に示すような微小直方体の 面に働く力を面積力といい、単位面 積当たりの面積力を応力(stress) という。応力を各軸方向に成分表示 zz z Fx 0 ; Fy 0 ; Fz g xy yx yy y x をする場合には、 などと表示す ij 図 6.7 面積力 る。ここで、第1添字 i は応力が働いている面の方向、第2添字 j は力の方向を 表すことに決める。すると、応力として図に示した9個の成分が考えられ、こ - 169 - れらを総称して応力テンソル(stress tensor)という。 xx yx zx xy xz yy yz zy zz (6.27) 応力テンソルにおける対角要素 xx; yy; zz は垂直応力(normal stress)といい、 面に垂直に働く応力を表し、その値は一般には異なった値をとる。流体中の微 小要素では、それらの平均値が圧力 p となり、 p は(圧縮を正にとる)つぎのよう に定義される。 ( xx yy zz ) (6.28) p 3 応力テンソルにおける残った 6 個の要素は面に平行に働く応力であり、せん断 応力(shearing stress)という。このせん断応力はモーメントのつり合いから、 つぎの関係式が成り立つ。 xy yx , yz zy , zx xz (6.29) このように、流体に働く面積力としては、圧力と粘性力を考えればよい。 6.4.3 粘性法則 すでに、第 2 章においてニュートンの粘性法則からせん断応力が (du dy) というように、速度勾配に比例して発生することを学んでいる。これらをまと めると、ニュートン流体では、応力とひずみ速度に関して以下の仮定が成り立 つ。 (1)静止流体には粘性による応力は働かない。 (2)粘性による応力はひずみ速度と一次式で結ばれる。 (3)特別な方向性はない。等方性。 この仮定から、せん断応力 ( xy , yz , zx ) とひずみ速度の関係は、第2章で学ん だせん断ひずみ速度を参照して、つぎのようになる。 ---------------------------------------------------------------------------------------------------------tan θ1 tan θ 2 v u ☆復習:せん断ひずみ速度h (1 / s ) (2.14) dt dx y --------------------------------------------------------------------------------------------------------- v u w v u w xy yx ; yz zy ; zx xz (6.30) z x x y y z - 170 - 一方、非圧縮流体の場合、第2章伸びひずみ速度を参照して、流体要素が x 方 向に伸び、 y 方向に縮むときの垂直応力 xx yy は ---------------------------------------------------------------------------------------------------------- u dxdt 2点間の伸び u x ☆復習: x方向伸びひずみ速度a 元の距離 時間 dxdt x v dydt 2点間の伸び v y y方向伸びひずみ速度b 元の距離 時間 dydt y (2.11) (2.12) --------------------------------------------------------------------------------------------------------- u v xx yy (6.31) x y と考えられ、この式(6.31)から u v xx yy 2 x y となり、これらを変形して整理すれば、垂直応力はそれぞれ u v u xx 2 x x y yy 2 u v v y x y (6.32) (6.33) となる。さらに同様にして、 xx zz はつぎのようになる。 u w x z このようにして得られた以上の各式の和をとれば u v w u 3 xx xx yy zz 6 2 x x y z xx zz 2 (6.34) (6.35) となる。ここで圧力 p が ( xx yy zz ) 3 p であることを考慮すれば、各方向 の垂直応力はそれぞれつぎのように与えられることがわかる。 u 2 u v w xx p 2 x 3 x y z (6.36) v 2 u v w y 3 x y z (6.37) yy p 2 - 171 - zz p 2 w 2 u v w z 3 x y z (6.38) とくに、非圧縮性流体では上式の右辺第3項は連続の式( divV 0 )からゼロとな り、この場合には垂直応力 ( xx , yy , zz ) は最終的につぎのようになる。 v u w ; yy p 2 ; zz p 2 x z y xx p 2 (6.39) 6.5 粘性流体の運動方程式 6.4 節で流体の加速度、流体に働く質量力、面積力および粘性力について述べ てきた。ここではこれらの結果を使って粘性流体の運動方程式を導く。 6.5.1 ナビエ・ストークスの運 動方程式 図 6.8 に示されるように流 れ場に想定した微小な直方体 dxdydz を考える。そして、運 動方程式を組み立てるために、 ニュートンの運動第2法則を 微小要素に適用して、以下、 順次考察して行く。 ☆面 x に働く x 方向の応力に 基づく x 方向の力 dy z zx zx yx xx xx xx dz yx yx zx dx y x 図 6.8 微小要素に働く各種応力 x x における応力は xx 、 x dx の位置における応力は xx xx であり、応 力に基づく力はつぎのようになる。 xx xx xx xx x dx dydz x dxdydz (6.40) ☆面 y に働く y 方向の応力に基づく x 方向の力 yx yx dy dxdz dxdydz yx yx y y ☆面 z に働く z 方向の応力に基づく x 方向の力 zx zx zx zx z dz dxdy z dxdydz (6.41) (6.42) 以上の力を合計すると、 x 方向の面積力が求められる。ここで、単位質量あた - 172 - りの質量力(体積力加速度)の x 方向成分を X とすれば、ニュートンの運動の 第2法則を適用することによって、 x 方向の運動方程式は次式となる。 dxdydz yx zx Du dxdydz Xdxdydz xx Dt y z x (6.43) この式に先に求めた式(6.33)の( xx 、 yx 、 zx )を代入して整理すると、 2 u 2 u 2 u 1 u v w Du 1 p X 2 2 2 Dt x y z 3 x x y z x (6.44) 同様にして、 y 方向および z 方向の質量力をそれぞれ Y 、 Z とすれば 2 v 2 v 2 v 1 u v w Dv 1 p Y 2 2 2 Dt y y z 3 y x y z x (6.45) 2 w 2 w 2 w 1 u v w Dw 1 p Z 2 2 2 Dt z y z 3 z x y z x (6.46) となる。ただし、動粘度は 、実質微分 D Dt は以下のように表される。 D u v w Dt t x y z (6.5) これをナビエ・ストークス(Navier-Stokes)の式(以下、NS 方程式と記述)と いう。もう尐しこの NS 方程式を簡略化して表わすと Du 1 p (6.47) X 2 u Dt x Dv 1 p Y 2 v Dt y (6.48) Dw 1 p Z 2 w Dt z (6.49) となる。ここで、演算子 2 は、 2 2 2 2 2 2 x y z (6.50) 2 で与えられる。 6.5.2 円筒座標系における NS 方程式 直交座標系と同様にして、円筒座標系における左辺の実質微分項は 6.2 節で - 173 - すでに求められており、その結果はつぎのように表された。 V V 2 V V V V r r z V V , V V , V V r z t r t r t (6.18) ただし、 V (6.19) Vz r r z さらに、 r , , z 方向の質量力を R, , Z とすれば、円筒座標系における NS 方程 V Vr 式はつぎのようになる。 V Vr V 1 p 2 V V Vr R 2Vr 2r 2 t r r r r (6.51) V VV V 1 p 2 Vr V V r 2V 2 2 t r r r (6.52) Vz 1 p V Vz Z 2Vz t z (6.53) 2 ここで、演算子 2 は、 2 1 1 2 2 (6.54) r 2 r r r 2 2 z 2 ---------------------------------------------------------------------------------------------------------☆6.5.2 円筒座標系における NS 方程式の研究課題 1.円筒座標系の NS 方程式(6.51)、(6.52)および(6.53)について、各軸成分 2 Vr ,V ,Vz を用い、演算子を開放した形で記述せよ。 2.直交座標系における NS 方程式(6.47)、(6.48)および(6.49)を円筒座標系に変 換し、式(6.51)、(6.52)および(6.53)となることを導け。 ---------------------------------------------------------------------------------------------------------6.6 理想流体の運動方程式(オイラーの運動方程式) 6.6.1 直交座標 理想流体は非圧縮、非粘性である。したがって、NS 方程式において、動粘度 または粘性係数を 0 、 0 とおけばよい。 Du 1 p Dv 1 p Dw 1 p X; Z Y ; Dt x Dt z Dt y 実質微分の部分を書き換えれば、 x, y, z 方向運動方程式は、 - 174 - (6.55) u u u u 1 p u v w X t x y z x (6.56) v v v v 1 p u v w Y t x y z y (6.57) w w w w 1 p u v w Z t x y z z (6.58) 直交座標系におけるオイラーの運動方程式は、このように書き表される。 6.6.2 円筒座標 円筒座標系の加速度はすでに、6.2.2 節において以下のように求められている。 V V 2 V V V V r r z V V , V V , V V (6.18) r z t r t r t ただし、 V Vr V Vz r r z (6.19) したがって、この場合のオイラーの運動方程式は、単位質量あたりの質量力の r, , z 方向成分を R, , Z とすれば次式となる。 DVr V 1 p R Dt r r DV VrV 1 p Dt r r 2 (6.59) (6.60) DVz 1 p Z Dt z (6.61) ここで実質微分は D V Vr Vz Dt t r r Z (6.62) で与えられる。実質微分を展開すればつぎのようになる。 Vr V V Vr V V 1 p Vr r Vz r R t r r z r r 2 V V V V V V V 1 p Vr Vz r t r r z r r Vz Vz V Vz V 1 p Vr Vz z Z t z r z z (6.63) (6.64) (6.65) ---------------------------------------------------------------------------------------------------------第6章 総合演習問題 - 175 - 1.断面積が一定のまっすぐな水平管内を、非圧縮性の理想流体が加速度αで 流れるとき、管軸 x 方向の圧力 p の分布式を求めよ。ただし、重力の影響 は無視できるものとする。 解答: p x const 2.鉛直軸(重力場)のまわりに、流体が一定角速度 で回転しているとき、流体 内の圧力分布を求めよ。ただし、流体は非圧縮性で密度は とする。 2r 2 gz const 解答: p 2 3.一定の水平軸まわりに、流体が一定の角速度 で回転している時、流体内 の圧力分布を求めよ。ただし、流体は非圧縮性で密度は とする。 ヒント: u 0, v z, w y ; x Y 0, Z g 2r 2 2 y z 2 gz const 解答: p 2 4.静止流体の基礎方程式を、NS 方程式またはオイラーの運動方程式から証明 せよ。 5.速度成分がそれぞれ、 u Ax ; v Ay で与えられるような非圧縮性2次元 流れがある。 A は定数。流体の密度を として、 x 軸上の圧力分布を求め よ。ただし、質量力、粘性の影響は無視できるものとし、原点 x y 0 に おける圧力は p 0 とする。 1 解答: p A 2 ( x 2 y 2 ) p0 2 6.定常非圧縮性2次元流れで、 x 方向速度が u Ay x 2 y 2 のとき、 y 方向 速度 v を連続の式から求めよ。ただし、 y 0 のとき v A x とする。 Ax 解答: v 2 x y2 7.定常非圧縮性2次元流れで、原点から流体がわき出しているとき、半径方 向速度 Vr を連続の式から求めよ。ただし、 r R で、速度 Vr U とする。 解答:Vr UR r 8.図 6.9 に示した、間隔 H の平行平板間を、平板に平行な方向に非圧縮性ニ ュートン流体が層状に流れている。最大速度を u max として、速度分布を求 めよ。ただし、流れの方向を x 軸、平板に垂直な方向を y 軸とし、外力は無 - 176 - 視できるものとする。 y u H u u max x 図 6.9 平行平板間の流れ 9.直交座標系における非定常3次元完全流体の運動方程式(オイラーの運動方 程式)を円筒座標 r , , z で表せ。 ---------------------------------------------------------------------------------------------------------- - 177 -
© Copyright 2026 Paperzz