三角関数
担当 三澤
1 . 角度の表し方
1 . 1 度数法:
直角を 90 o とし、その 1
o
90 、1 を単位として角度を表す方法をいう。
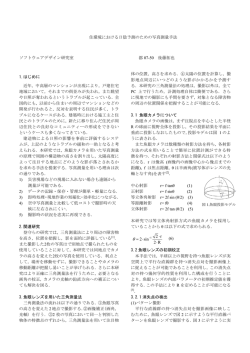
1 . 2 弧度法:
B
左図の ∠AOB を考えるとき、o 点を中心とした半径 r の円を描き、線分
s
P
oA、oB との交点をそれぞれ Q、P とする。円弧 PQ の長さ s は、∠AOB に
比例する。また、半径 r にも比例する。従って、半径 r が 1 の時の円弧
r
θ
o
の長さで、∠AOB の大きさを表すことにする。このような角度の表し方
A を弧度法という。弧度法で ∠AOB を表したときの値を θ とすれば、
Q
s
θ = (1)
r
図−1
で与えられる。上式の右辺からわかるように円弧の長さ s を半径(の長さ)r で割っているので、θ に
は単位がつかないが、度数法で表した角度と区別するためにラジアン(rad)をつける。上式から明
らかなように中心角 ∠AOB が θ (rad) である半径 r の円弧の長さは rθ で与えられる。360°は、弧度
60°は π/3、
30°は π/6 である。
法(角度を半径 1の円の円弧の長さ)
で表せば、2πである。また、180°は π、
2 . 鋭角の三角比
A
辺
)
b( 対辺 )
c( 斜
B
θ
図−2に示す直角三角形 ABC の ∠ABC を θ とするとき、この角を
取り囲む3辺の比(対辺:斜辺、底辺:斜辺、対辺:底辺)をそれ
ぞれ次のように書き表し、
b
= sin θ (サイン (sine) シーターと読む)、
c
a
= cosθ (コサイン (cosine) シーターと読む)、
c
b
= tan θ (タンジェント (tangent) シーターと読む)、
a
C
a( 底辺 )
図−2
これらを正弦、余弦、正接と呼ぶ。またこれらを三角比と言う。直角三角形で考えているから、角度
θ は 0°から 90°である。
3 . 三角関数
y
図−3に示すように、 xy 平面上で、正の x 軸を始線にとり、角度
座標
θ が表す動径 OPと原点 oを中心とする半径 rの円との交点 Qの座
P
Q(x,y)
y
y
r
を (x,y) とする。このとき、 ,
r
o
θ
図−3
x
S
X
x
x y
, の値は角 θ の値のみに依存す
r x
る。したがって、これらに比を三角比の場合に倣い次のように書
き表し、
一般角の正弦、 余弦、
正接の定義
余弦、正接の定義
y
= sin θ 、 (2)
r
x
= cosθ 、 (3)
r
y
= tan θ 、 (4)
x
1
これらを一般角の正弦、余弦、正接という。角度は、正の x 軸から反時計回りにはかり、これと反対
向き(時計回り)に測った角には、負号を付ける。ここで一般角の正弦、余弦、正接は、動径 OP と
原点 o を中心とする半径 r の円との交点 Q の座標 (x,y) と円の半径 r を用いて定義されていることに
注意する必要がある。θ の大きさによって、座標値 x,y は正の値、0、負の値をとるから、正弦、余弦、
正接の値は正の値、0、負の値をとる(図−3,4,5,6参照)。正接(tangent)の値は、交点 Q が
y 軸に限りなく近づく( x 座標が限りなく 0 に近づく)とき、その値は ∞ 、あるいは −∞ となる。
P
Q(x,y)
y
y
y
y
r
S
x
θ
o
θ
x
S
x
X
θ
x
o
r
y
y
Q(x,y)
x
S
o
r
P
図−5
図−4
x
Q(x,y)
P
図−6
表 1:正弦、余弦、正接の値の変化
関数
θ =0 0 <θ <
π
2
θ=
π
2
π
<θ <π θ =π
2
π <θ <
3π
2
θ=
3π
2
3π
< θ < 2π
2
θ = 2π
sin θ
0
+
1
+
0
-
-1
-
0
cosθ
1
+
0
-
-1
-
0
+
1
tan θ
0
+
±∞
-
0
+
±∞
-
0
(注意)tan θ の値は、θ が π 、3π に値が小さいほうから近づくときは、∞ に、逆に θ の値が大きい
2
2
ほうから π 、3π に近づくとき、−∞ になる。
2
2
3 . 1 三角関数の性質
3 . 1 . 1 性質 その1.
三角関数の定義から、次式が成立する。
y
y r sin θ
(5)
tan θ = = =
x x cosθ
r
図−3,4,5,6の円の半径 r と動径 OP と円の交点 Q の座標 (x,y) の間には、
x 2 + y 2 = r2
科成立する。上式の両辺を r 2 で割れば、
2
2
x y
=1
+
r r
となり、これを式(2)、
(3)、
(4)の関係を用いて書き直せば、
cos2 θ + sin 2 θ = 1 (6)
2
となる。上式の両辺を cos2 θ で割り、式(5)の関係を用いれば、
1 + tan 2 θ =
1
(7)
cos2 θ
を得る。
(注)(cosθ ) 2 、(sin θ ) 2 や (tan θ ) 2 を通常 cos2 θ 、sin 2 θ 、tan 2 θ と書き表す。
3 . 1 . 2 性質 その2.
y
P`
Q`(x,-y)
-y
r
o
y
θ
−θ
S
x
r
Q(x,y)
P
x
先に述べたように、角度は正の x 軸から反時計回りにはかり、こ
れと反対向き(時計回り)に測った角には、負号を付ける。そこ
で負の角の正弦、余弦、正接と同じ大きさの正の角の正弦、余弦、
正接の関係について考えてみる。図−7に示すように、角度 -θ が
座標
表す動径 OP と原点 o を中心とする半径 r の円との交点 Q の座
を (x,y) とする。この点 Q と x 軸に関して対称の位置にある点を Q’
座標は (x,-y) である。線分 oQ’ と正の x 軸とのな
とする。 Q’ 点の座
す角は、θ である。正弦、余弦、正接の定義(式(2),
(3),
(4)
参照)から、以下の関係式が導かれる。
sin(−θ ) =
y
−y
= − sin θ (8)
=−
r
r
x
= cosθ (9)
r
y
−y
= − tan θ (10)
tan(−θ ) = = −
x
x
すなわち、cosθ は、θ の偶関数、sin θ および tan θ は θ の奇関数である。したがって、縦軸に cosθ 、
sin θ および tan θ を採り、横軸に θ を採ったグラフを描けば、cosθ は縦軸に関して対称、sin θ および
tan θ は縦軸に関して反対称となる。
π
次に − θ の正弦、余弦、正接と θ の正弦、余弦、正接との関係
y
2
P
Q(x,y)
S
π
y
について考えてみる。角度 − θ を表す動径 OP と原点 o を中心と
r π_
2
−θ
P`
2
座標を (x,y) とする。正の x 軸となす
r
Q
する半径
の円との交点
の座
θ
x
Q`(y,x) 角が θ である動径 OP’ と半径 r の円との交点を Q’ とすれば、図−
r
y
θ
o x S` X x 8に示すように ∆oQS と ∆oQ' S' が合同であるから、Q’ 点の座
座標
図−7
cos(−θ ) =
は、(y,x) となる。したがって、正弦、余弦、正接の定義と ∆oQ' S ' を
考えることにより、以下の関係式が導かれる。
図−8
π
y
sin − θ = = cosθ (11)
2
r
π
x
cos − θ = = sin θ (12)
2
r
1
π
y 1
tan − θ = = =
2
x x tan θ
y
このような関係式はいくつもあるが、それらを覚える必要はない。必要なときに、自ら関係式を導き
出せばよい。これらの関係式を誘導するコツは、正の x 軸となす角が θ である動径 OP’ と半径 r の円
座標を考え、それらを使って問題となっている正弦、余弦、正接を表す
との交点を Q’ とし、Q’ 点の座
ことを考えればよい。ただし、少なくとも正弦、余弦、正接の定義(式(2),(3),(4))が、頭
に入っていることが必要である。このような考えに基づいて、以下にさらにいくつかの関係式を導い
てみるが、自分でもやってみることを勧める。
3
y
P
Q(x,y)
角度
S y
-x
r
R
x
正の x 軸となす角が θ である動径 OP’ と半径 r の円との交点を Q’
座標は (y,-x) となる。したがって、次の関係式
とすると、 Q’ 点の座
P`
Q`(y,-x) が導かれる。
r
π
θ −2 +θ
θ
S`
y X
o
π
+ θ の正弦、余弦、正接を考える。図−9に示すように、
2
π
y
sin + θ = = cosθ (11’)
2
r
x
−x
π
x
= − sin θ (12’)
cos + θ = = −
r
2
r
1
1
π
y
=−
tan + θ = = −
−x
2
x
tan θ
y
図−9
y
P
Q(x,y)
R
P`
Q`(-x,y)
y
π−θ r
r
θ
S
x
角度 π − θ の正弦、余弦、正接を考える。図−10に示すように、
正の x 軸となす角が θ である動径 OP’ と半径 r の円との交点を Q’
座標は (-x,y) となる。このことから、次の関係式、
とすると、Q’ 点の座
θ
o
y
= sin θ 、
r
x
−x
= − cosθ 、
cos(π − θ ) = = −
r
r
sin(π − θ ) =
-x
S`
X
x
y
y
= − tan θ 、
=−
−x
x
tan(π − θ ) =
が、導かれる。
図−10
3π
− θ の正弦、余弦、正接につい ては、図−11、
2
角度 π +θ 、
3π
+ θ 、2π − θ の正弦、余弦、正接については、図を自分で描いて関係式を導いてみよ。
2
12を利用し、
y
y
π+θ
-y
x
Q(x,y)
P
S
θ
r
o
y
r
θ
3π
−− −θ
2
-x
P`
Q`(-x,-y)
S`
-x X
x
x
Q(x,y)
P
図−11
S o
rθ
θ
r
P`
Q`(-y,-x)
S`
-y X
x
y
図−12
3 . 1 . 3 性質 その3. 加法定理
加法定理とは、2 つの角 α、β の和あるいは差の正弦または余弦が、個々の角の正弦、余弦とどのよ
うな関係をもつか示すものであり、次の 4 つが上げられる。
4
正弦の加法定理
sin(α + β ) = sin α cos β + cosα sin β (13)
sin(α − β ) = sin α cos β − cosα sin β (14)
余弦の加法定理
cos(α + β ) = cosα cos β − sin α sin β (15)
cos(α − β ) = cosα cos β + sin α sin β (16)
少なくとも計算をスムースに行うには、上の式(13)と(15)はすぐ書けるようにしておいて欲
しい。
ここでは、式(14)、
cos(α + β ) = cosα cos β − sin α sin β
を証明する。
図−13に示すように、原点を中心とし、半径 r の円を描く。
y
正の x 軸と角 α + β をなす動径と円周との交点を R とする。
ま
R(rcos(α+β),rsin(α+β)) た、正の x 軸と半径 r の円との交点を P とする。図から明ら
かなように、点 R の座標は、oP と x 軸とのなす角が α + β で
r
Q
あ る か ら、正 弦、余 弦 の 定 義(式(2)、(3))か ら、
β
r
α
( r cos(α + β ), r sin(α + β )) で与えられる。また、点 P の座標
x
o
P(r,0)
は、( r, 0) で与えられる。したがって、線分 RP の長さの平方
は、次式で与えられる。
2
( RP ) 2 = {r cos(α + β ) − r} + {r sin(α + β )}
2
= r 2 {cos2 (α + β ) + sin 2 (α + β ) + 1 − 2 cos(α + β )}
図−13
(a)
= 2 r 2 {1 − cos(α + β )}
上式右辺を変形するにあたり、式(6)の関係を用いた。
図−13に示されている三角形 oRP を原点 o を中心に時計回り
y
に角 α だけ回転させると、図−14が得られる。点 R の座標
は、( r cos β , r sin β ) で与えられ る。また、点 P の 座標は、
R(rcosβ,rsinβ)
r
o
β
−α
r
x
Q(r,0)
P(rcosα,-rsinα)
( r cos(−α ), r sin(−α )) で与えられるが、式(8)、(9)の関係
か ら、座標は ( r cosα , − r sin α ) とな る。この図の 場合、線分
RP の長さの平方は、次式で与えられる。
2
( RP ) 2 = {r cos β − r cosα } + {r sin β − (− r sin α )}
2
= r 2 {cos β − cosα } + r 2 {sin β + sin α }
図−14
2
2
= r 2 {sin 2 α + cos2 α + sin 2 β + cos2 β − 2 cosα cos β
+2 sin α sin β }
式(a)と(b)の右辺を等号で結ぶと、
= 2 r 2 {1 − cosα cos β + sin α sin β } (b)
cos(α + β ) = cosα cos β − sin α sin β
が得られる。
ヒント
(1)cos(α − β ) = cosα cos β + sin α sin β の関係を証明するには、cos(α − β ) を cos(α + (−β )) と書き直
し、式(13)を使って展開したのち、式(8)、(9)を用いて変形すれば出来る。
(2)sin(α + β ) = sin α cos β + cosα sin β の関係を証明するには、式(12)の関係から、
π
sin(α + β ) = cos − (α + β )
2
5
π
= cos( − α ) − β
2
と書けることを利用し、(1)の結果および式(11)、
(12)の関係を利用する。
(3)sin(α − β ) = sin α cos β − cosα sin β の関係を証明するには、sin(α − β ) を sin(α + (−β )) と書き直
し、(2)の結果と式(8)
、(9)を利用する。
3 . 2 三角関数の微分
3 . 2 . 1 三角関数の微分の準備
(1)角度 θ (rad) を 0 に近づけたときの関数
Q
sin θ
の極限値
θ
R
lim
θ →0
sin θ
= 1 (17)
θ
となることを、以下に説明する。
1
o
θ
tanθ
sinθ
1
図−15に示すように、中心角 θ、半径 1、円弧が PQ の扇型
を考える。Q 点から半径 oP に垂線を下ろし、oP との交点を H
H
P
とする。また、P 点から oP に垂線を立て、その垂線と線分
oQ の延長線との交点を R とする。
sin θ
関数
の角度 θ (rad) を 0 に近づけたときの極限値を考え
θ
π
π
るから、0 < θ < の範囲で考えても特に問題はない。そこでまず 0 < θ < の場合を考える。図−
2
2
図−15
15の△ oQP、扇型 oQP、△ oRP の面積の大小関係は、次の通りである。
△ oQP の面積<扇型 oQP の面積<△ oRP の面積
2 つの三角形の高さ QH 、RP は、半径が 1 であるから図に示す値を持つ。したがって、各部分の面積
を計算して不等式を作れば、
π ⋅ 12
1
1
⋅ 1 ⋅ sin θ <
⋅ θ < ⋅ 1 ⋅ tan θ
2
2π
2
[ 注)扇型の面積は、円の面積( π ⋅12 )を中心角の大きさで比例配分して(
(
θ
を乗ずると)得られる。]
2π
すなわち、
sin θ < θ < tan θ
π
となる。0 < θ < の範囲では、0 < sin θ であるから、上式を sin θ で割れば、
2
1
θ
tan θ
<
=
1<
sin θ sin θ cosθ
上式の逆数をとれば、
1
sin θ
<
<1
cosθ
θ
1
sin θ
θ → 0 のとき、
→ 1 であるから、上の不等式から θ → 0 のとき、
→1 であることがわかる。
cosθ
θ
sin θ
lim
=1
θ →+0 θ
(注)θ を a より大きな値をとりながら a に近づけることを示す場合は θ → a + 0 、θ を a より小さ
な値をとりながら a に近づけるときは、θ → a − 0 と表記し、これらを右側極限、左側極限という。
ただし、a の値が 0 のときは、簡単に θ → +0 、θ → −0 と書く。
6
次に −
sin θ
π
< θ < 0 のときを考える。lim
なる表記は、θ = −Θ と置き、Θ を使った表記に改めると、
θ →−0 θ
2
sin θ
sin(−Θ )
− sin Θ
sin Θ
lim
= lim
= lim
= lim
=1
θ →−0 θ
Θ →+0
Θ →+0 −Θ
Θ →+0 Θ
−Θ
Q.E.D.
(2)2 つの正弦の和を三角関数の積の形で表現する方法
正弦の加法定理、すなわち
sin(α + β ) = sin α cos β + cosα sin β (13)
sin(α − β ) = sin α cos β − cosα sin β (14)
の両辺の和と差を求めると次式が得られる。
sin(α + β ) + sin(α − β ) = 2 sin α cos β
sin(α + β ) − sin(α − β ) = 2 cosα sin β
余弦の加法定理、すなわち
cos(α + β ) = cosα cos β − sin α sin β (15)
cos(α − β ) = cosα cos β + sin α sin β (16)
の両辺の和と差を求めると次式を得る。
cos(α + β ) + cos(α − β ) = 2 cosα cos β
cos(α + β ) − cos(α − β ) = −2 sin α sin β
このようにして得られた 4 つの式において、α + β = A 、α − β = B と置けば、α =
A+ B
A−B
、β =
と
2
2
書けるから、次のような関係式に書き表せる。
A+ B
A−B
(18)
cos
2
2
A+ B
A−B
(19)
sin A − sin B = 2 cos
sin
2
2
A+ B
A−B
(20)
cos A + cos B = 2 cos
cos
2
2
A+ B
A−B
(21)
cos A − cos B = −2 sin
sin
2
2
sin A + sin B = 2 sin
式(18)∼(21)は記憶する必要はないが、正弦同士の和および差、余弦同士の和および差は、
正弦や余弦の積の形に直せることを記憶しておけばよい。今見たように、関係式は正弦定理と余弦定
理から簡単に導きだせる。
3 . 2 . 2 三角関数の微分
(1)sin x の x に関する微分
d
sin x = cos x
dx
となることを以下に示す。
微分の定義に従えば、sin x の x に関する微分は次式で計算される。
sin( x + ∆x ) − sin x
d
sin x = lim
∆x → 0
dx
∆x
右辺の分子は、正弦の差であるから、式(19)を用いて次のように変形することが出来る。
sin( x + ∆x ) − sin x = 2 cos
2 x + ∆x
∆x
sin
2
2
したがって、右辺の分数は、さらに次のように変形される。
7
sin( x + ∆x ) − sin x
=
∆x
2 cos
2 x + ∆x
∆x
∆x
sin
sin
x
x
+
2
∆
2
2 = cos
2
⋅
x
∆
2
∆x
2
したがって、極限の性質
lim f ( x ) = α 、lim g( x ) = β のとき、
x →a
x →a
lim f ( x ) g( x ) = lim f ( x ) ⋅ lim g( x )
x →a
x →a
x →a
= αβ
を利用すれば、次の結果が得られる。
∆x
sin( x + ∆x ) − sin x
d
2 x + ∆x
2
= lim cos
⋅
sin x = lim
∆
x
→
0
∆
x
→
0
∆
x
dx
∆x
2
2
∆x
sin
2 x + ∆x
2
= lim cos
⋅ lim
∆x → 0
∆
x
→
0
∆
x
2
2
= cos x
sin
ここで、最終結果を導くに当たり、
2 x + ∆x
= cos x
∆x → 0
2
∆x
であり、∆x → 0 は
→ 0 でもあるから、式(17)を用いれば、
2
∆x
∆x
sin
sin
2 = lim
2 =1
lim
∆x
∆x →0 ∆x
→0 ∆x
2
2
2
lim cos
となることを用いた。
(2)cos x の x に関する微分
次に
d
cos x = − sin x
dx
であることを示す。
式(11’)から、
π
cos x = sin( + x )
2
π
π
であった。u = + x と置くと、sin( + x ) は sin u と書ける。したがって、
2
2
d
d
π
d
du
cos x = sin( + x ) = sin u
dx
dx
du
dx
2
d π
d
d π
= cos u ⋅ ( + x ) = cos u ⋅ ( ) +
x
dx 2
dx
dx 2
8
π
= cos u = cos( + x )
2
= −sin x
ただし、最後の結果を導くために式(12’)を利用した。
9
© Copyright 2026 Paperzz