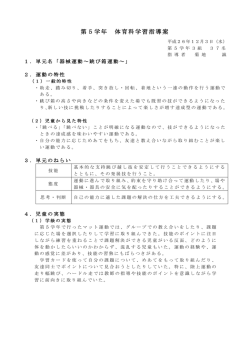
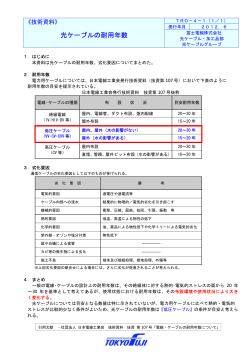
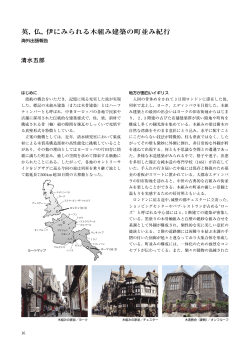
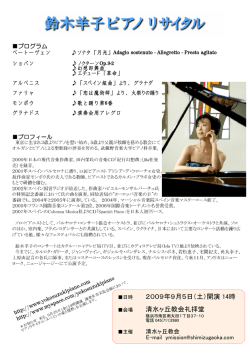
技術資料 ポテンショメータについて 回転系 Blue Potについて ■概 要 回転系 Blue Potは、磁気抵抗素子とマグネットの組合せによる、 当社の無接触形ポテンショメータを総称します。磁気抵抗 素子は3端子となっており、その中点電位は磁界の移動に より変化します。従って接触形のポテンショメータと同様 に磁気抵抗素子の両端に電圧を加えると、中点からの出力 が無接触の状態で得られます。 この結果、従来の接触形ポテンショメータに比べ、ノイズ レス・高分解能・高速応答性・長寿命など、位置センサと しての特性が優れています。 これらの製品は本体もしくはラベルを青色にして、Blue Potの識別としています。 回転系 ■特 長 1.ノイズレス 変位速度に関係なく、出力ノイズはありません。 回転系 2.分解能 出力の分解能は実用上無限小です。 3.出力の滑らかさ 巻線形やコンダクティブプラスチック形の規格を適用し て比較した場合、これより1桁良い平滑性があります。 技術資料 4.低トルク、低フリクション 無接触式ですので、回転トルク、フリクションが非常に 小さく、弱い力の変位にも使用できます。 5.高周波特性 磁気抵抗効果は、理論的には10GHzまで周波数に依存 しないことが確認されています。 回転系 6.高速性 高速応答性が優れています。 7.低消耗エネルギー 永久磁石と半導体の組合せですから、光センサが必要と する光源のような消耗エネルギーはほとんど必要としま せん。(アンプの付いたものは除きます) 回転系 8.防爆性 しゅう動接点やコレクタがないためアークの発生がなく、 防爆性に優れています。 9.長寿命 軸受部を除けば摩擦部がないので、動作寿命は無限大で す。 回転系 ●角度センサ用の磁気抵抗素子 -89- 技術資料 動作原理 回転系 Blue Pot ■動作原理 1 検出方法 回転系 1 2 変位と出力の関係 磁気抵抗素子とマグネット(永久磁石)の組合せで構 端子 ∼ 間に印加電圧 1 3 Vinを入力して、シャフトのマ 成されますが、方法は次のような種類があります。 グネット位置が変位した時の端子 ∼ 間の出力電圧 1 2 磁気抵抗素子に近接したマグネットを平面的に変位さ (図3、4参照) Voutとの関係が次のようになります。 せて、抵抗変化を得る方法。 2 1 1 値はMR1<MR2となり出力電圧はVout<2 Vin マグネットを固定し磁気抵抗素子を変位させて、抵抗 変化を得る方法。 3 マグネットがMR2側にある時は磁気抵抗素子の抵抗 2 マグネットが均等にある時は磁気抵抗素子の抵抗値は MR1=MR2となり出力電圧はVout= 1 2 Vin 磁気抵抗素子とマグネットは密着固定しておき、近接し た磁性体のヨークを変位させて、抵抗変化を得る方法。 3 マグネットがMR1側にある時は磁気抵抗素子の抵抗 回転系 1 値はMR1>MR2となり出力電圧はVout>2 Vin いずれの場合も、変位させる側にセンサの回転軸や駆動軸 を直結して、無接触の状態で機械量、物理量を電気信号に 3 回転形 変換させます。 4 2 回転形 回転系 123 出 力 電 圧 比 ︵ % ︶ マグネット M R1 技術資料 M R2 磁気抵抗素子 3 123 123 123 123 60 50 90゜ 有効電気角 40 1 5 1 2 〔出力; Vout〕 〔入力; Vin〕 0゜ 180゜ 360 ゜回 転 角 回転系 図3:回転形の動作原理(例CP-2UX) 図1:回転軸に直結したマグネットの位置を、回転する角度により 磁気抵抗素子の抵抗比変化を得る時の等価回路 直線形 3 直線形 1 2 回転系 マグネット 磁気抵抗素子 MR1 回転系 1 出 力 電 圧 比 ︵ % ︶ M R2 2 2 1 60 2 3 3 1 1 2 3 50 3 〔出力: Vout〕 〔入力: Vin〕 40 有効ストローク 0.6mm 0 図2:駆動軸に直結したマグネットの位置を、直線的にかえて 0.5 ストローク 1 mm 図4:直線形の動作原理(例LP-1U) 磁気抵抗素子の抵抗比変化を得る時の等価回路 -90- 技術資料 変換方式 ■ 変換方式 方式 5 と磁気抵抗素子の組合せ方を変えた、独特の変換方式を採 ピボット サスペンション(PMP-5U) 用しています。 回転系 2. 傾斜形 Blue Potは、検出内容によって、それぞれマグネット マグネット 磁気抵抗素子 下図は、代表的な変換方式を図示したもので、主な商品 には変換方式Noを記載しています。 ダンパーオイル ケース 1. 回転形 方式 6 スプリング サスペンション(PMP-S10TX) 閉磁路(UV-1) 板バネ 磁気抵抗素子 磁気抵抗素子 ダンパーオイル ケース 回転系 マグネット ヨーク マグネット 3. 直線形 方式 2 開磁路(CP-2UX) 閉磁路(LP-3U) 磁気抵抗素子 ヨーク マグネット ヨーク 技術資料 マグネット 方式 7 回転系 方式 1 回転系 振子 磁気抵抗素子 スライダーガイド ヘリカル ヨーク(CP-3UY) 方式 8 開磁路(LP-15UL) ヨーク 磁気抵抗素子 回転系 方式 3 磁気抵抗素子 ヘリカル ヨーク シャフト 方式 4 シャフト マグネット 方式 9 スパイラル ヨーク(CP-5UY) 傾斜 ヨーク(LP-30UF-R) 回転系 ヨーク スパイラル ヨーク シャフト 磁気抵抗素子 マグネット マグネット 磁気抵抗素子 -91- 回転系 マグネット FPC 技術資料 温度特性 回転系 ■温度特性 このような結果から温度による、磁気抵抗効果は一様では Blue Potの温度による出力電圧の変動(温度特性)は、 ないので、Blue Potの出力電圧は図7のように温度によ しゅう動形に比べて2桁位大きい特性をもっています。 って変動します。 Blue Potに使用している磁気抵抗素子は図5のよう 70 な負の抵抗温度特性をもっています。 40 回転系 60 回転系 抵 抗 値 ︵ kΩ ︶ 出 力 電 50 圧 比 ︵ % ︶ 40 30 20 10 30 温度をパラメータとした時 -45 0 25 50 。 温 度( C ) 0 0 +45 回 転 角 θ( ) 75 回転系 +47 図5:磁気抵抗素子の抵抗温度特性 θ= +45 +45 +43 また、図6が示すように温度特性は、磁気抵抗素子に作用す 技術資料 出 力 ︵ 回 転 角 ︶ ︵ ︶ る磁束密度の大きさにも依存します。さらに磁気抵抗素子 の2象限のMR1とMR2の温度特性は製作上のバラツキ などにより差があります。 回転系 1 .6 +41 + 2 θ= 0 0 - 2 -41 θ= -45 -43 -45 -47 1 .4 回転角をパラメータにした時 -20 0 +25 +50 +75 温 度(° C) 回転系 抵 1 .2 抗 変 1 .0 化 率 0 .8 図7:Blue Pot の温度特性データ例(回転形) B = 00T ただし磁界が図8の状態のように MR1 と MR2 に均等 に作用している場合(出力電圧比50%の時)の温度ドリフ 0 .6 トは、他の位置に比べて小さく、中点から移動するに従っ 0 .4 B = 40.4T 回転系 0 25 50 。 温 度( C ) て大きくなります。 75 マグネット MR1 1 図6:磁気抵抗素子の抵抗温度依存 (磁束密度B:パラメータ) MR2 2 3 図8:Blue Pot 回路図 -92- 技術資料 温度補償方法 ■温度補償方法 回転系 温度補償の方法としては、図9-2のように磁気抵抗素子に 直並列抵抗( PQ 抵抗)を接続して、2象限の各合成抵 抗のバランスをとって低温域から高温域の範囲で中点の温 度特性を改善します。 また図9-3のように回路付のBlue Pot には PQ 抵抗 回転系 の他にサーミスタを併用して中点以外の温度特性も改善し ます。 MR2 Vout 2 POT. MR1 θ= 1 + 2 + 1 0 - 1 - 2 θ= 0 - 7 - 8 - 9 -10 -11 -20 10° θ= 0 2 POT. P1 1 Q1 AMP 0 P2 POT P1 DEF Vout Q1 +80 温度(° C) +11 +10 + 9 + 8 + 7 + 2 + 1 0 - 1 - 2 - 7 - 8 - 9 -10 -11 -20 図9 -3 直並列抵抗とサーミスタによる温度補償回路と温度特性データ例(傾斜角形) -93- +25 回転系 Q2 QH1 +55 - 7 - 8 - 9 -10 -11 回転系 出 力 ︵ 傾 斜 角 換 算 ︶ ︵ 。 ︶ QH2 PH2 +80 + 2 + 1 0 - 1 - 2 -20 + Vin PH1 +55 +11 +10 + 9 + 8 + 7 図9 -2 直並列抵抗による温度補償回路と温度特性データ例(傾斜角形) TH2 サーミスタ TH1 +80 回転系 出 力 ︵ 傾 斜 角 換 算 ︶ ︵ 。 ︶ Vout +55 技術資料 P2 +25 温度(° C) 図9 -1 補償前の回路と温度特性データ例(傾斜角形) Q2 + Vin 3 ° 回転系 1 0° +11 +10 + 9 + 8 + 7 回転系 出 力 ︵ 傾 斜 角 換 算 ︶ ︵ 。 ︶ + Vin 3 0 +25 温度(° C)
© Copyright 2026 Paperzz