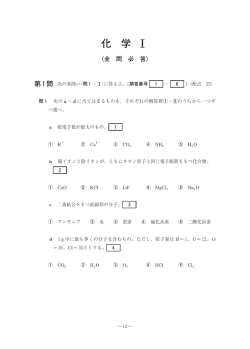
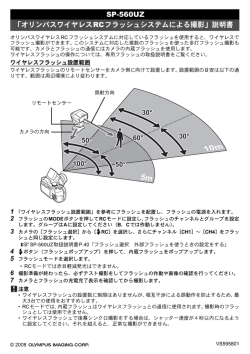
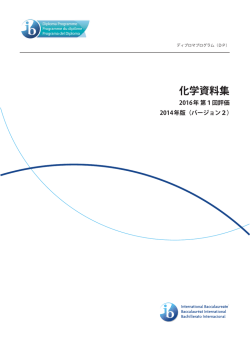
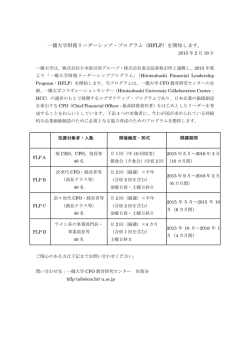
無線位置システムによる放飼鶏の軌跡データ取得とその空間分析 岡部篤行 佐藤俊明 岡部佳世 今村栄二 Siripun MORATHOP Charan JAILANGKA Surachai RATANASERMPONG 林良博 秋篠宮文仁 Acquisition of spatio-temporal data of free-range chicken using a Wireless Fidelity (WiFi) positioning system and spatial analysis of the obtained data Atsuyuki OKABE, Toshiaki SATOH, Kayo OKABE, Eiji IMAMURA, Siripun MORATHOP, Charan JAILANKA, Surachai RATANASERMPONG, Yoshihiro HAYASHI and Fumihito, AKISHINONOMIYA Abstract: The objective of this study is to acquire spatio-temporal data of free-range chicken kept in an experiment field in Chiang Rai, Thailand, using a Wireless Fidelity (WiFi) positioning system First, the paper describes the functions of the components of the system, the arrangement of the system components in the experiment field, and the procedure of the experiment. Second, the paper obtains the probability density function of observed locations for a fixed point. Third, based on this distribution, the daily life areas of chicken are estimated with the kernel density method, and findings obtained from this estimation are reported. Keywords: 無線位置システム (WiFi positioning system), 放飼鶏(free-range chicken), 軌跡 追跡(tracking), 精度(accuracy), カーネル密度法 (kernel density method) 1. はじめに さは,個体の体重の約 5%ということである.従っ 動物生態学で一番の労力と時間を要する作業は, て,GPS を装着できる動物は,個体の体重が 1kg 動物の空間行動軌跡データをある程度の日にちに亘 以上のものに限られる.さらに GPS は,動物が木の って取得することである (Turchin, 1998).動物生態 下や藪の中などに入ると,その位置データを取得す 学においては,主に二つの方法が頻繁に使われてい るのが著しく困難になる. る.一つが GPS を使う方法であり(例えば,報告書 一方,テレメトリーであるが,研究当初,知りう 『GPS で動物を追跡する方法』 ,2001 を参照) ,もう る限りでは 0.5 グラム程度のものも販売されており, 一 つ がテ レメ ト リー を使 う 方法 であ る (例 えば かなり体重の少ない動物にも装着することが可能で Millsoaugh and Marzluff, 2001 を参照).どちらの方法 ある.しかしテレメトリーは,位置データを取得す も,それを利用する環境条件によって,長所と短所 るのに常に調査者がアンテナを操作していなければ がある. ならないという制約がある.この制約は,昼夜に亘 GPS については,重さが一つの問題点となる.研 究当初,知りうる限りで一番軽いものが 65 グラムで って多くの動物個体を同時に調査する場合,大きな 障害になる. あったが,Ando and Ogasawara (1970)によれば,動物 そこで当研究では,これら GPS とテレメトリーの に装着して動物の行動の自由を奪わない装着物の重 短所を克服できそうな Wireless Fidelity(WiFi)位置シ 岡部 篤行:113-8656 東京都文京区本郷 7-3-1 東京大学空間情報科学研究センター 同大大学院工学系研究科 電話:03-5841-6225 e-mail:[email protected] ステムを実験的に放飼鶏群に適用し,実際に短所を 克服できるかどうかを調べた. 論文は,第 1 に WiFi 位置システムの適用方法を述 与えられるので,解像度は 1 メートル以下とはなり べ,第 2 にそのシステムで得られるデータの精度を えず(実際の解像度は後述),測定の時間間隔は,最 示す.第 3 に,その精度の下でのニワトリ空間行動 短で 0.125 秒であるが,当研究では 1 秒に設定した. を把握する方法を検討し,第 4 にその方法を適用し てニワトリ空間行動の分析を行う.最後に,当研究 をまとめながら WiFi 位置システムの長所と短所を 述べる. 2.2. 実験場所と WiFi 位置システムの配置 実験を行った場所は,タイの北部チェンラーイ県 にあるチェンラーイ畜産研究技術移転センターの一 画で,広さは約 200 メートル四方の開墾地である(図 2).この地区に 8 軒のコンクリートブロック造りの 2.実験の方法 2.1. WiFi 位置システムの構成と機能 平屋があり(図 2),南の 2 軒(図 2 の H1, H5)は居住 当研究では AeroScout 社が開発した WiFi 位置情報 家屋で,残りの 6 軒は空屋となっている.そのうち システムを用いた.このシステムは,タグ,アクテ の 2 軒(図 2 の H2, H6)をそれぞれ実験機器の準備 ィベータ,位置受信機,Power over Ethernet (PoE) ハ 室,管理エンジン室とした. ブ,WiFi アクセスポイント,管理エンジンの 6 つの 実験地は,道路を挟んで東側は開墾地で裸地と草 機器で構成され,主な機器の機能は次の通りである. 地が広がり,周辺は藪で囲まれている(図 3) .西側 タグは動物(今回の実験ではニワトリ)に装着さ は,丈の低い木とバナナがまばらに植えられた畑地 れるもので,位置点データ(x-y座標)を無線で送 である.人の出入りは,2 軒の住人だけであり,日 信する.タグの重さは 35 グラムで,大きさは 62mm 中は全員が農作業に出るため,人影は極めて少ない. ×40mm×17mm である(図 1). ニワトリは自由に動き回ることができる地区となっ 位置受信機は,タグから送信されてきた位置デー ている. タを受信し,その受信信号を管理エンジンに送る機 H8 H4 H7 H3 能を持つ.受信機のアンテナには指向性の違いで, 360 度領域,135 度領域,60 度領域の 3 種類のアン CH2 CH3 テナがある. H2 H6 管理エンジンには WiFi アクセスポイント経由で H1 H5 送られてくる位置データを処理し,タグの位置を表 CH1 示する機能を持つ. 位置データは,1 メートルグリッド上の離散点で N 0 タグ 人家(H: House) 鶏小屋(CH: Chicken House) 餌場 道路 360°受信機 135°受信機 60°受信機 50 100m H5 の横の木 東の木 H5 床下 図 2 実験場における施設,機器の配置 図 1 ニワトリの背中に装着したタグ 図 3 実験場の東側から望んだ景観 表 1 放飼鶏の所属小屋と特性 WiFi 位置システムは,13 個の受信機,2 個の PoE ハブ,1 個のアクセスポイント,1 台の管理エンジン で構成し,受信機は図 2 のように配置した. 2.3. ニワトリ 被験動物はタイ語で Kai Chon と呼ばれるシャモ 系の 18 羽のニワトリである.これらのニワトリは, チェンラーイ畜産研究技術移転センターで飼われて いたニワトリであるが,2005 年 10 月 15 日から実験 場の図 2 に示された 3 つの鶏小屋で放し飼いにせず 飼育した.それぞれの鶏小屋には雄 1 羽と雌 5 羽が 飼われ,月齢とひな連れのあり・なしは表 1 の通り である. これら 18 羽のニワトリの背中に図 1 で示すように 飼われていた 雄雌 月齢 ひな連れ 小屋番号 CH1_C1 CH1 雄 12 なし CH1_H1 CH1 雌 6∼7 なし CH1_H2 CH1 雌 6∼7 なし CH1_H3 CH1 雌 6∼7 なし CH1_H4 CH1 雌 6∼7 なし CH1_H5 CH1 雌 6∼7 なし CH2_C1 CH2 雄 12 なし CH2_H_M CH2 雌 6∼7 あり CH2_H2_Y CH2 雌 2∼3 なし CH2_H3_Y CH2 雌 2∼3 なし CH2_H4 CH2 雌 6∼7 なし CH2_H5 CH2 雌 6∼7 なし CH3_C1 CH3 雄 12 なし CH3_H1 CH3 雌 6∼7 なし CH3_H2 CH3 雌 6∼7 なし CH3_H3 CH3 雌 6∼7 なし CH3_H4_M CH3 雌 6∼7 あり CH3_H5 CH3 雌 6∼7 なし *ニワトリ ID の命名規則は,最初の 3 文字が「小屋番号」 を,次の 1 文字の C(COCK)が「雄鶏」を,H(HEN)が 「雌鶏」を表し,次の一文字は小屋内でのユニーク番号を 示す.また一部に付いている M(MOTHER)および Y (YOUNG)は,それぞれ「雛連れあり」 ,「若鶏」を示す. ニワトリID タグを装着した.装着には,ニワトリがテープをつ い て ほ つ れ な い よ う に 縫 い 目 が 一 切 な い Bally H7 H3 H6 H2 H5 H1 Ribbon Mills 社のテフロンテープを使用した.この テープを含むタグの重さは 40 グラムとなった.装着 直後,ニワトリは違和感を感じるようであったが,1 時間もするとタグの装着を気にしていないような振 る舞いに見えた. 2.4. 実験の経緯 実験は 2005 年 11 月 2 日から 9 日にかけて行った. 11 月 2 日に WiFi 位置システムの設置作業を行い, ニワトリにタグを装着し,鶏小屋に戻した. 3 日朝に鶏小屋の扉を開放し,放し飼い状態とし た.3 日から 4 日の午後 4 時 30 分までは,WiFi 位置 システムの調整を行った.この間,データの取得は 行ったが,アンテナの本数,位置などを変えている ので,データを比較するには,それなりの調整が必 要となる. 4 日午後 4 時 30 分から 9 日の午前 9 時 15 分まで は WiFi 位置システムを同一状態に固定してデータ 図 4 鶏小屋の固定点の位置点データ分布(分 布点の中にある小さい□は真の位置で,△は 平均位置を示す.) わっている午後 6 時頃から約 30 分間,システムを止 めて,静的なバックアップをとることとした. 9 日午前 9 時 15 分以降,タグの取り外しと WiFi 位置システムの撤収を行った. 餌は,5 日まで午前と午後に 1 回ずつ,鶏小屋の 中と,図 2 の▲の位置に置いた.6 日から 9 日まで は,餌を与えなかった.ただし 6 日には前日の餌が 残っていた. の取得をすることができた.ただし,完全なデータ が取得できているかのチェックとハードウェアトラ 3.固定点の位置精度 ブルにより万が一にも取得済みのデータを損なわな タグの位置精度を解析するために,3 軒の鶏小屋 いようにするため,毎日,ニワトリが寝床につきお の屋根にニワトリに装着したタグと同じものをそれ ぞれ 1 個ずつ設置した. 図 4 は,11 月 7 日の 3 固定点のシステムで取得し ある.この領域を, 「一日行動圏」と呼ぶことにする. 図 5 と同様な図を全てのニワトリについて求めた. た位置点の分布である.この図から分かるように, その結果,それぞれのニワトリの一日行動圏と位置 固定点でもシステムに起因するランダム要因によっ 点密度分布は相違が視覚で明確に判断できることが てばらつきがあり,タグの位置点は確率的である.5 判明した.そこで,ニワトリの一日行動圏・位置点 日から 8 日のデータを同様に調べた結果,次の特性 密度分布が似ているものをグループ化し,そのグル があることが分かった. ープを表 2 に示した.この表をもとに主な結果をま i. 真の位置(図 4 の□)と分布の平均位置(図 4 とめると次のようになる. の△)が一致していないことから,位置点データ にはバイアスがある. ii. バイアスの方向は,場所によって異なる. iii. 位置点の分布は真の位置を中心として等方性が ない.非等方性の度合いは 3 地点によって異なる. iv. 3 地点の分布形は,地点ごとに異なる.同一地点 i. 3 羽の雄鶏の一日行動圏は,ある程度重なるもの の,異なった形状になっている(図 5a,b,c). ii. それぞれの雄鶏の一日行動圏とほぼ同じ雌鶏が いる(雄鶏に「従う」雌鶏がいる)(CH1_C1 と CH1_H1∼H5,CH2_H4;CH2_C1 と CH2_H5; CH3_C1 と CH3_H1∼H3,H5). では,日々似てはいるものの,完全に同じという iii. 若鶏は,雄鶏と異なった一日行動圏を持っている. わけではない. iv. ひな連れ雌鶏は,雄鶏と異なった一日行動圏を持 っている.ひな連れ雌鶏 CH_H3_M は,6∼7 日 4. カーネル関数の推定 以上の位置点分布の特性から,取得したニワトリ は若鶏と似た一日行動圏をし,8 日には異なる一 日行動圏となった. の位置データは,確率的に扱うのが適当であると言 v. 日中のグループが必ずしも同じところで寝ると える(Okabe et al., 2006).具体的には,データを基 はかぎらない.CH2_H4,H5 は,夜 CH2_C1 と異 にカーネル密度法で位置を推定するのが一つの方法 なる所で寝ている.また日中の異なるグループが である.特性 iii からすると,カーネル関数は,非等 同じ所に寝ることがある.CH3_H4_M は夜 G4 グ 方性の関数形が考えられるが,3 地点での分布形か ら実験地の任意の地点のカーネル関数を推定するの は困難である.そういう状況の下では,等方性のカ ーネル関数を使うのがセカンドベストと言えよう. カーネル関数としては多用されている bi-weight 関数を採用した(Silverman, 1986).そのバンド幅は, 3 地点の真の位置を合わせ 3 地点の分布を集約した (a) (b) 分布より 95%を含む半径から求めた.その結果,バ ンド幅は 5.63 メートルとなった. 5.ニワトリの一日行動圏による分析 図 5 に,カーネル密度法で推定した 3 羽の雄鶏 CH1_C1, CH2_C1, CH3_C1 と雌鶏 CH_H1 の午前 6 時から午後 4 時までの位置点密度分布を示す.グレ ーで塗られている領域は,密度が 0.1 以上の領域で (c) (d) 図 5 雄 鶏 (a) CH1_C1 (b) CH2_C1, (c) CH3_C3,雌鶏(d) CH1_H1 の 11 月 7 日の一日 行動圏と位置点密度分布 表 2 日中におけるグループと夜間の寝場所 ニワトリID 2日まで飼わ れていた小屋 CH1_C1 CH1_H1 CH1_H2 CH1_H3 CH1_H4 CH1_H5 CH2_C1 CH2_H1_M CH2_H2_Y CH2_H3_Y CH2_H4 CH2_H5 CH3_C1 CH3_H1 CH3_H2 CH3_H3 CH3_H4_M CH3_H5 CH1 CH1 CH1 CH1 CH1 CH1 CH2 CH2 CH2 CH2 CH2 CH2 CH3 CH3 CH3 CH3 CH3 CH3 5日昼 5日夜 6日昼 6日夜 7日昼 7日夜 8日昼 G1 CH 1 G1 CH 1 G1 CH 1 G1 8日夜 CH 1 G1 G1 G1 CH 1 CH 1 CH 1 G1 G1 G1 CH 1 CH 1 CH 1 G1 G1 G1 CH 1 屋 根 CH 1 CH 1 G1 G1 G1 CH 1 屋 根 CH 1 CH 1 G1 CH 1 G1 CH 1 G1 CH 1 G1 CH 1 G1 CH 1 G1 CH 1 G1 CH 1 G1 CH 1 G2 G3 G3 H5床下 CH 2 CH 2 G2 G3 G3 H5床下 CH 2 CH 2 G2 G3 G3 H5床下 CH 2 CH 2 G2 G6 G3 H5床下 CH 2 CH 2 G3 G1 CH 2 H5横の木 G3 G1 CH 2 H5横の木 G3 G1 CH 2 H5横の木 G3 G1 CH 2 H5横の木 G2 H5横の木 G2 H5横の木 G2 H5横の木 G2 東の木 G4 G4 G4 CH 3 CH 3 CH 3 G4 G4 G4 CH 3 CH 3 CH 3 G4 G4 G4 CH 3 CH 3 CH 3 G4 G4 G4 CH 3 CH 3 CH 3 G4 G5 CH 3 CH 3 G4 G5 CH 3 CH 3 G4 G5 CH 3 CH 3 G4 G5 CH 3 CH 3 G4 CH 3 G4 CH 3 G4 CH 3 G4 CH 3 *表内の「G」は日中の行動グループを示す. ループのニワトリと共に CH3 で寝ている. を重ね,そのズレで 2 羽の一日行動圏の近さを計量 vi. ニワトリは実験開始日まで飼われていた鶏小屋 化するのも 1 方法である.また,2 羽の密度分布の で寝るとはかぎらない.観察より CH2_C1 は H5 違いを,Kullback-Leibler 統計量で計量化することも の床下(図 2 の+)で,CH2_H4 は H5 の横の木 できよう(但し,密度ゼロの扱いを工夫する必要が の上(図 2 の☆)で,CH2_H5 は H5 の横の木の ある) .このような方法で先に述べた結果をより計量 上と東の木の上(図 2 の☆および△)で寝ており, 的に述べることが可能となるが,定性的な結果は変 CH1_H1 は鶏小屋 CH1 から「閉め出されて」そ わらないように思われる. 一日行動圏は,ニワトリの位置の 1 日に亘る集約 の小屋の屋根の上で寝ている. vii. 餌を断つと一日行動圏は広がるが,グループによ データであるということに注意する必要がある.一 って程度の差がある.特に若鶏の一日行動圏は拡 日行動圏が重なるということは,同時間に近い位置 大率が大きい(図 6) . にいるということを意味しない.ということは,一 日行動圏から同じグループに属するとされたニワト リが,時系列的に見ると異なったグループで行動し 6.分析方法の検討 一日行動圏は,視覚的な比較でニワトリ空間行動 の特色をかなり明らかにすることができるが,この ているということはあり得る.今後,時系列分析を 加える必要がある. 視覚的判断をより客観的にするには,いくつかの方 法が考えられる.例えば,2 羽の一日行動圏の形状 7.おわりに WiFi 位置システムの適用には,アンテナの位置の 誤認や,測量の座標系の読み間違い,アンテナの再 設置作業などがあり,最終形態で定常的データを得 られるようになるまでにはほぼ 3 日を要した(第 2 節).しかし一旦,システムを設置すると,位置デー タは人手を借りずに 18 羽の行動軌跡を昼夜連続(バ (a) (b) 図 6 若鶏(CH2_H3_Y)の一日行動圏 (a)5 日,(b)8 日 ックアップ時を除く)して 1 秒間隔で取得すること ができた.この労力削減は,準備の労力を上回るも 当研究は多くの方々の共同作業によって行われた のがある. 当論文の成果を要約すると,次のようになる. ものである.HCMR 日本メンバーの赤木攻,原田昭, WiFi 位置システムから得られる位置データは確 川嶋舟,高松淳,Chiang Rai Livestock Research and 率的である.そこで当論文では,定点のデータから Technology Transfer Center の C. Jailangka, N. 得られる確率密度関数の特性(第 3 節)を吟味し(第 Mahakanta, S. Trimanee, V. Chintanawat,NEC ネッツ 4 節) ,それからカーネル関数を設定し,カーネル密 エスアイの中川貴之,松下和弘,長野一博,石渡祥 度法で位置点密度を推定する方法を採用した. 嗣,飴本幸司,NESIC THAI の小田浩次, 福安智亮, B. この位置点密度から導出される一日行動圏を使っ Kumkhean, J. Krutmoung, PASCO の 佐 藤 圭 , K. て,ニワトリの行動領域の分析を行った結果,第 5 Khanophet,Mongkon Surveying & Consulting の M. 節に述べたニワトリの空間行動の特色を得ることが Krachangtoy, V. Boonlanasri, C. Kanobdee, M. Viennok, できた. DISTDA の T. Suepa,また I. Rittaporn, 第 6 節に述べたように,当論文で提案した方法は, ニワトリの 1 日の行動位置を時間軸で集約したデー 以上の諸氏 に様々なご指導,ご支援を得た.ここに感謝の意を 表する. タに基づく分析で,時系列的軌跡のデータに基づい た分析ではない.結果の解釈においては,その限界 参考文献 をわきまえる必要がある. Ando, S. and Ogasawara, A. (1970) Telemetry of the 最後に現時点での WiFi 位置システムの短所を述 べておこう.図2に示したように,今回,位置を測 behavior of Pale thrush(Turdus pallidus). Japanese Journal of Ecology , 20, 137-144. 定できる範囲は約 200 メートル四方である.この範 Millspaugh, J. and Marzluff , J. (2001) Radio Tracking 囲をさらに広げることは,ある程度までは可能であ and Animal Populations, New York: Academic Press. るが,所詮,受信機が設置されている範囲でしか位 Atsuyuki Okabe, Toshiaki Satoh, Kayo Okabe, Takayuki 置を測定できない.その範囲を越えて行動する動物 Nakagawa, Eiji Imamura, Kazuhiro Matsushita, には適用をすることが出来ない.また,受信機の設 Kazuhiro 置は人手で行うので,人が入れる場所でなければな Amemoto, Yoshihiro Hayashi and Akishinonomiya らず,人が容易に行けない場所を動き回る動物には Fumihito 適用がむずかしい. Fidelity Positioning System to Tracking Free-range Nagano, (2006) Yoshitsugu Ishiwatari, Koji Applicability of a Wireless WiFi 位置システムの野生動物行動把握への適用 Chickens (Gallus gallus domesticus) and Helmeted にあたっては,以上の長所と短所を踏まえて行うの Guineafowl (Numida meleagris galeata) Journal of が肝要と思われる. the Yamashina Institute for Ornithology (to appear). Tracking 謝辞 当 研 究 は Animals with GPS, An International Conference held at the Macaulay Land Use Institute, Human-Chicken Multi-relationship Research (HCMR) Project (代表:秋篠宮文仁)の一環と して行われたものである.当研究の一部は,科学研 究費補助金(基盤 A) 「鶏の形態嗜好に関する日本と タ イ の 多 面 的 比 較 感 性 モ デ ル 」( 代 表 : 原 田 昭 , No.17200015)と家禽資源研究会の補助を受けており, 感謝する次第である. Abadeen, 12-13 March 2001. Turchin, P. (1998) Quantitative Analysis of Movement, Sunderland: Sinauer Associates. Silverman, B.W. (1986). Density Estimation for Statistics and Data Analysis, London: Chapman and Hall.
© Copyright 2026 Paperzz