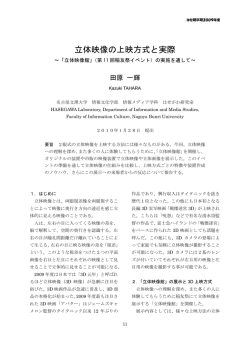
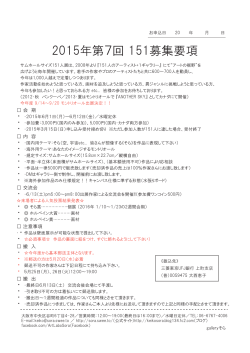
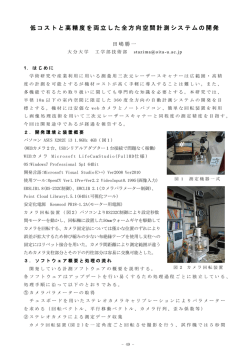
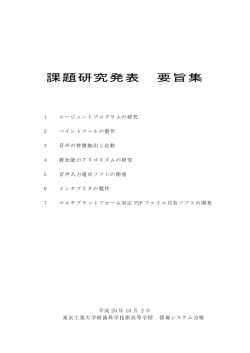
課題研究発表 1 2 3 4 5 6 7 8 要旨集 ポータブル点字打ち込み機の製作 Project SORA ~ 会 話 が で き る 人 工 無 能 の 開 発 ~ HMD を 使 用 し た シ ミ ュ レ ー シ ョ ン ツ ー ル の 製 作 画像処理を用いたメイク補助ソフト Idea Table ユーザー拡張機能式のコミュニケーションツールの開発 HMD を 利 用 し た AR 技 術 の 研 究 筋電の取得と筋肉の電気的制御について 平 成 24 年 10 月 4 日 東 京 工 業 大 学 附 属 科 学 技 術 高 等 学 校 情 報 シ ス テ ム 分 野 P 1 課題名 ポータブル点字打ち込み機の製作 発表者氏名 木村哲也 指導教員 増田泰治 中村将仁 山本篤 背景・目的 2011 年 3 月 11 日 の 東 日 本 大 震 災 で は ,多 く の 死 者・行 方 不 明 者 が 出 た 。目 に 障 害 を 持 っ た 方 は ,貼 り 紙 の 文 字 や 地 図 の 情 報 が 伝 わ ら ず 苦 難 を 強 い ら れ た 。そ こ で , 災 害 時 で も 目 の 不 自 由 な 人 が 情 報 を 得 ら れ る こ と を 目 的 と し ,手 軽 に 持 ち 運 ぶ こ と が で き ,無 線 通 信 で 情 報 の や り 取 り が で き る 点 字 打 ち 込 み 機 を 製 作 す る 。ま た ,副 経 路 を 持 つ 無 線 ネ ッ ト ワ ー ク を 構 築 し ,災 害 時 の 安 否 確 認 や ,避 難 指 示 な ど の 情 報 伝 達 が で き る よ う に す る 。 理論 ―点字打ち込み機― 紙 に く ぼ み を つ け る 「 打 ち 込 み 機 構 」 と , 点 の 打 ち 込 み 位 置 を 制 御 す る 「 紙 送 り 機 構 」, CPU ボ ー ド で 構 成 し て い る 。サ ー ボ モ ー タ で 金 属 棒 を く ぼ み の つ い た 底 板 に 押 し 付 け て 紙 に く ぼ み を つ け る 。 DC モ ー タ ー で キ ャ タ ピ ラ を 回 転 さ せ , 摩 擦 で 動 か し , 打 ち 込 み 位 置 を制御する。 ―無線ネットワーク― ZigBee 通 信 規 格 で ネ ッ ト ワ ー ク を 構 築 す る 。メ ッ シ ュ 構 造 の ネ ッ ト ワ ー ク を 構 築 し ,も し何らかの不具合で通信できなくなっても,別の経路を通して通信することができる。メ ッセージには固有の番号をつけ,同じものは複数回印刷しないようにする。 方法と結果 ―点字打ち込み機― 改 良 を 繰 り 返 し , 3 台 製 作 し た 。 2 台 目 の 「 V2」 と 3 台 目 の 「 V3」 (図 1)で 打 ち 込 ん だ 点 字 を ,8 月 24 日 ,都 立 久 我 山 青 光 学 園( 視 覚 障 害 教 育 部 門 と 知 的 障 害 教 育 部 門 を 併 置 す る 特別支援学校)の全盲の先生に 5 段階で評価してもらった。評価結果を図 2 に示す。 図 1 点 字 打 ち 込 み 機 「 V3」 P / 図 2 点 字 打 ち 込 み 機 「 V2」「 V3」 評 価 P 2 打 ち 込 み 速 度 は , 1 文 字 当 た り 約 3.5 秒 で , 市 販 の 点 字 プ リ ン タ の 速 度 の 35 倍 で あ る 。 し か し , 市 販 の 点 字 プ リ ン タ は 100 万 円 か ら 300 万 円 で あ る の に 対 し , 製 作 し た 点 字 打 ち 込み機は 1 万円程度で作ることができる。 ―無線ネットワーク― 無 線 通 信 ネ ッ ト ワ ー ク ( 図 3) の 構 築 に 成 功 し た 。 無 線 機 は ZigBee 近 距 離 無 線 通 信 規 格 の モ ジ ュ ー ル 「 XBee-PRO ZB」を 3 台 用 い た 。そ れ ぞ れ の 無 線 機 は 互 い に 送 受 信 が 可 能 で ,何 ら か の 不 具 合 で 通 信 で き な く なっても別の経路を通して通信することができる。通 信成功の判断は,通信確認データを最高 5 回送信して 図 3 無線ネットワーク図 成功したら,メッセージを送る。通信確認には最長で 10 秒 を 要 す る 。 また,同じメッセージを複数回受信する場合がある た め ,メ ッ セ ー ジ に は 図 4 の よ う に 固 有 の 番 号 を 付 け , 同じ番号のメッセージは印刷しないようにした。 考察 図 4 受信パケット構造 ―点字打ち込み機― 「打ち込み機構」については,認識できる点を打つことができた。しかし,打ち込みア ー ム の 3 本 中 1 本 は ,40 回 の 打 ち 込 み で 破 損 し た 。打 ち 込 み の 秒 数 を 0.50 秒 か ら 0.35 秒 に変更することで,点の高さを変えずにアームの負担を軽減できると考えている。 「紙送り機構」については,点と点の間隔が不均一になった。原因は,キャタピラと紙 が 滑 る こ と で あ る 。ト ラ ク タ フ ィ ー ド (用 紙 に 空 け ら れ た 穴 を 突 起 で 引 っ 掛 け る こ と に よ っ て 紙 送 り を 行 う 方 式 )を 用 い る こ と で , 解 決 で き る と 考 え て い る 。 ―無線ネットワーク― 通信が成功しているかどうかの判断が増えると,タイムラグが大きくなる。通信成功の 判断に時間制限と回数制限をかけることで解消できると考えている。 参考文献 1 ) mbed Rapid Prototyping for Microcontrollers https://mbed.org/ 2) 社会福祉法人日本盲人福祉委員会「東日本大震災における視覚障害者の状況と支援」 http://www.ncawb.org/communi/63/4.html P / P 3 課題名 Project SORA ~ 会 話 が で き る 人 工 無 能 の 開 発 ~ 発表者氏名 鵜澤貴之 指導教員 近藤千香 小浦篤 小俣健太朗 杉澤煕基 羽根田涼 背景・目的 人工無能とは,知能を持たない会話プログラムのことである。ここ数年,多数の人工無 能が登場しているが,それらの主な目的は“ナビゲーション”や“アシスタント”として のものがほとんどである。しかし,私たちは,それだけでは面白くないのではないか,人 工無能をもっと身近に感じられるようなものは無いのだろうか,と考えた。そこで,私た ち は 単 純 に “ 話 し 相 手 ” や “ 遊 び 相 手 ” に な る よ う な 人 工 無 能 「 SORA」 を 制 作 す る こ と に し た 。 ま た , 開 発 に は , 今 ま で に 使 用 し た こ と の な い Ruby と い う プ ロ グ ラ ム 言 語 を 選 択した。 「 SORA」の 制 作 を 通 し て 自 分 た ち が 使 え る 言 語 を 増 や す こ と も 本 研 究 の 目 的 の 一 つとした。 理論 「 SORA」 と の 会 話 の 一 連 の 流 れ を 次 の よ う に 考 え た 。 ま ず , ユ ー ザ ー か ら の 入 力 文 を Mecab と い う 形 態 素 解 析 ソ フ ト を 通 し ,文 を 解 析 す る 。そ し て ,そ れ ら の 情 報 を も と に 返 答文を生成する。それを返し,次の入力を待つ。 上 に 書 い た SORA の 返 答 生 成 の 部 分 の ア ル ゴ リ ズ ム を 説 明 す る 。今 回 ,私 た ち は 複 数 の アルゴリズムを組み合わせて自然な会話を実現できるようにした。 ①ログ型 ユーザーにより入力された文章と似たような文章を過去の会話のログから探 し 出 し , そ の 次 の 文 章 を SORA の 返 答 の 基 礎 と す る 方 法 。 例えば,右の図1のようなログがあ るとする。ユーザーが“君の好きな 色 は 何 ? ”と 入 力 す る と ,図 1 の( Ⅰ ) が似ている文章として認識される。 そして,その次の文,つまり(Ⅱ) が返答の際のベースとなる文章になる。似たような文章の認識には,文章を単語ごとに品 詞分解したものを用いる。入力された文章と品詞の並び順が一致すると,似ている文章と 認識される。 ② Eliza 型 P / Eliza 型 は ,ユ ー ザ ー の 発 言 を 質 問 に し て オ ウ ム 返 し す る ,あ る い は 特 定 の P 4 ワ ー ド に 決 ま り 文 句 で 対 応 す る , と い う 動 作 を 行 う 。 Eliza 型 の み で 会 話 を 成 立 さ せ る こ とは難しいが,一回の受け答えとしてはある程度自然な返答ができる。よって他のアルゴ リズムと共存させ,使用頻度を調整することで会話の幅を広げることができる。 ③マルコフ型 マルコフ連鎖を用いて文章を生成する方法である。マルコフ連鎖はユー ザーとの会話ログを利用する。マルコフ連鎖では,文章を単語ごとに分解し,単語の並び の確率を利用し,文章を生成する。例としてこの要旨を使ってみる。ここまでの要旨内k に“会話”という単語は8回出てくる。そのなかで“会話”の次の単語の出現回数を調べ ると,表1のようになる。 表1 “会話”の次の単語の出現回数 この結果を確率として用いて, “会話” 次の単語 が プログラム の を ログ の後に続く単語を決定する。これを 使用回数 1 1 3 2 1 繰り返すことにより実際にあるものに近い自然な文章を生成することができる。 方法と結果 メ ン バ ー 内 で 実 際 に SORA と 会 話 し ,各 ア ル ゴ リ ズ ム を 評 価 し ,relevance matrix 法 で 表2 算出したところ 表2のような結 果が出た。 マルコフ型は 自然な会話には ならないことが 要素 各アルゴリズムの評価 文章自体の 流れの自 人間らしさ 返答文の柔軟さ 楽しさ 自然さ 然さ ウエイト 6 10 3 4 5 ログ 8 6 8 9 10 21 8 合計 El iz a 9 5 5 2 3 14 2 ロ グ +E li z a 8 6 7 10 10 21 9 マルコフ 5 2 4 4 4 98 多 か っ た た め メ イ ン の 会 話 モ ー ド に は 含 め ず に 別 モ ー ド と し て 搭 載 す る こ と に し た 。ま た , Eliza 型 は 会 話 の 成 功 率 は 高 か っ た も の の , 単 体 で は 実 に 機 械 的 な 返 答 が 多 く , 自 然 な 会 話 と い う テ ー マ に は そ ぐ わ な か っ た 。 結 果 , ロ グ 型 の 欠 点 を Eliza 型 で 補 っ た ロ グ +Eliza 型がもっとも優良なアルゴリズムであることがわかった。 考察 今 回 SORA と の 会 話 が 1 0 0 % 成 立 す る ま で に は 至 ら なかったが,ある程度の自然な会話を行うことはできた ( 図 2 )。今 後 ,細 か い 修 正 を 加 え れ ば ,よ り 自 然 な 会 話 に近づけることができるだろう。 図2 実行画面 参考文献 ・人工無能は考える http://www.ycf.nanet.co.jp/~skato/muno/index.shtml P / P 5 課題名 HMD を 使 用 し た シ ミ ュ レ ー シ ョ ン ツ ー ル の 製 作 発表者氏名 高倉雅哉 指導教員 都留裕貴(仲道嘉夫) 高田勝也 高橋哲生 古矢雅俊 背景・目的 非日常の状況がある程度想定できることをめざし,あらかじめ危険な状況を体験して, いざというときに落ち着いて行動するためのシミュレーションツールの開発を行うことに し た 。ま た ,よ り リ ア リ テ ィ の あ る シ ミ ュ レ ー シ ョ ン を 行 う た め ,HMD( ヘ ッ ド マ ウ ン ト デ ィ ス プ レ イ ) に よ っ て 没 入 感 を , Wii リ モ コ ン ・ Kinect に よ っ て 身 体 的 動 作 感 覚 を 引 き 出 せるようにした。 理論 映 像 出 力 機 器 に HMD を 採 用 す る こ と に よ っ て , プ レ イ ヤ ー を シ ミ ュ レ ー シ ョ ン に 没 入 さ せ,リアリティを高める。ただし,安全に配慮してある程度の現実認識可能域を設ける。 また,実際に身体を動かして操作することで,現実に体験しているかのような錯覚を起こ させるようにする。これらを実現するための演算をコンピュータ上で行い,シミュレーシ ョ ン 画 面 の デ ー タ を HMD に 送 る こ と と す る 。 シ ミ ュ レ ー シ ョ ン に 使 用 す る マ ッ プ は 福 島 第 一原発の四号機建屋内をモデルにした。 方法と結果 HMD は 既 製 品 で は な く ,我 々 で 制 作 し た も の を 使 用 し た 。 フルフェイスヘルメットを改造し,シールド部分に Android タ ブ ッ ト を 取 り 付 け て 画 面 と し た 。 フ ル フ ェ イ ス 図 1 制 作 し た HMD ヘルメットのシールド部分が上下する機構を生かし,安全性を確保した。 プ レ イ ヤ ー の 身 体 の 動 き を シ ミ ュ レ ー シ ョ ン に 反 映 さ せ る た め に , Kinect を 利 用 し た 。 Kinect を 使 用 し た こ と に よ り ,実 際 に 足 踏 み を し た 時 に ,シ ミ ュ レ ー シ ョ ン 内 の プ レ イ ヤ ーが移動する。また,シミュレーションにおいてのプレイヤーの視線は,実際のプレイヤ ーの視点位置によって変化するため,プレイヤーがしゃがんだり飛び跳ねたりすると,シ ミ ュ レ ー シ ョ ン に お い て の 視 点 も 変 化 す る 。ま た ,Kinect の み で は 頭 や 手 首 の 向 き ま で 正 確 に 判 定 す る こ と は 難 し い 。 そ こ で 方 向 検 知 に 優 れ た Wii リ モ コ ン を 使 う こ と で , 頭 の 方 向 の 変 化 と 連 動 し て 映 し 出 さ れ る 画 面 も 変 更 で き る よ う に す る 。 Wii リ モ コ ン は HMD に 設 置したものと,片手に持ちボタン操作を行うことができるものの二つを使用する。これら P / P 6 の プ ロ グ ラ ミ ン グ は 主 に C++と Unityscript を 使 用 し た 。 これらの機能をソケット通信で起動用のパソコンにて作動させ,そのうち画面の情報を komado と い う ア プ リ に よ っ て Android 端 末 に 送 る 。無 線 通 信 に す る こ と に よ り ,コ ー ド が 体 に 絡 ま る こ と に よ る 現 実 の 動 き へ の 制 約 を な く し た 。 マ ッ プ や プ レ イ ヤ ー の CG は Metasequoia や Maya と い っ た CG 作 成 ソ フ ト で 作 成 し , Unity3D を 利 用 し て 管 理 す る 。 今回作成したシミュレーションは,プレイヤーが原発内を捜索し,決まった地点にて特 定の動作を行うことによってシミュレーション終了 となるものとした。その時点で,それまでにプレイ ヤーが受けた放射線量などをデータ化して表す。原 発を移動している途中でも,現在受けている線量が どれほどかを示す。 図 2 シミュレーション風景 考察 現 実 で の 動 き を シ ミ ュ レ ー シ ョ ン 内 に 投 影 す る こ と は で き た 。Kinect を 利 用 し た 歩 行 判 定は,数人が足踏みを行ったデータをまとめ,平均をとることで適切な判定が行えるよう に な っ た 。問 題 点 と し て は ,Kinect,Wii リ モ コ ン ,Android 端 末 間 の 通 信 の 処 理 に 時 間 が かかるため,プレイヤーの実際の動きとシミュレーション内のプレイヤーの動きにラグが 生じる。これは,より高性能なコンピュータにて動作させることで改善すると思われる。 今後の展望として,問題点の解決と,歩く・走るの区別をしてプレイヤーの移動速度の変 化 を 実 装 予 定 で あ る 。 ま た , Wii リ モ コ ン の 精 度 を 向 上 さ せ る 工 夫 も 検 討 中 で あ る 。 さ ら に,マップやイベントの充実も予定している。 参考文献 1) 中 村 薫 : K i ne ct セ ン サ ー プ ロ グ ラ ミ ン グ 2) 高 橋 哲 治 郎 : Un it y 入 門 ~ 高 機 能 ゲ ー ム エ ン ジ ン に よ る マ ル チ プ ラ ッ ト フ ォ ー ム 開 発 ~ 3) 森 田 浩:よくわかる最新実験計画法の基本と仕組み 4) 普 遊 舎 : M M D セ カ ン ド パ ッ ク 5) 座 標 変 換 : ht tp :/ /w w w. m ec h. to ho k u- g ak ui n. ac . jp / rd e/ co nt e nt s /c ou rs e/ r ob o ti cs /c oo r dt r an s. ht ml 6) 俺 CG 屋 : h tt p: // ww w .c g -y a. ne t/ i -m e di a/ in de x .h t ml 7) Un it yS c ri p tR ef ar en c e : ht tp :/ /w w w. c is .s oj o- u .a c .j p/ ~i zu m i/ U ni ty _D oc u me n ta ti on _j p /D o cu me nt at i on / Sc ri pt Re f er e nc e/ in de x .h t ml P / P 7 課題名 画像処理を用いたメイク補助ソフト 発表者氏名 荒井和貴 指導教員 増田泰治 奥村雅紀 平山洸太 古沢慧 前田拳士朗 余川晃崇 背景・目的 班員の親からメイクを支援するために人の輪郭をコンピュータで判断するソフトウェア を 開 発 で き な い か と 依 頼 が あ っ た 。 そ こ で 私 達 は ,画 像 処 理 を 用 い て 輪 郭 の 型 を 判 断 し ,加 えて化粧法を提案するソフトウェアの開発を目的とした。 理論 ① キャプチャ キャプチャでは輪郭を確実に検出するために鼻の位置と額の頂点を 指 定 す る 基 準 線 を 表 示 す る 。作 業 を し 易 く す る た め に flip 関 数 を 用 い , 鏡のようにキャプチャ画面を反転させた。 ② パーツ座標の検出 OpenCV で 用 意 さ れ て い る Haar-like 特 徴 を 利 用 し た 分 類 器 を 用 い て 行 う 。 分 類 器 と は ,Haar-like 特 徴 に 基 づ い て 物 体 を 検 出 し ,分 類 す る も の で あ る 。 Haar-like 特 徴 と は , 矩形で指定された領域内の白と黒の2つの矩形の領域内のそれぞれ の 画 素 値 の 合 計 を 引 い た も の を 特 徴 量 と し て 導 き 出 し ,そ の 値 は 顔 の 各 パ ー ツ が 固 有 に 持 っ て い る た め ,そ れ に 基 づ い て 検 出 す る 。図 2 は ,「 目 」 「 口 」 「 耳 」 の Haar-like 特 徴 を 用 い た 分 類 器 の 例 を 示 し た も の で あ る 。 H(r1,r2)=S(r1)-S(r2)/2 こ の 式 を 使 っ て 特 徴 量 を 求 め る 。H()が 特 徴 量 を 表 し ,S()が 画 素 値 を 求 め る 関 数 ,r1 が 黒 領 域 ,r2 が 白 領 域 を 表 す 。 ③輪郭検出 キ ャ プ チ ャ し た 画 像 を 二 値 化 し ,ユ ー ザ ー の 輪 郭 線 だ け を 保 存 す る 。 入 力 画 像 と ,用 意 し て あ る サ ン プ ル 画 像 を OpenCV の cvMatchShapes という関数を使って形状マッチングを行う。 そ の 関 数 で は 入 力 画 像 ,サ ン プ ル 画 像 の Hu モ ー メ ン ト を 求 め そ れ ら の 画 像 の 近 似 値 を 計 算 す る 。 Hu モ ー メ ン ト と は 個 々 の 画 像 に 決 め ら P / P 8 れ た 値 で ,ス ケ ー ル 変 化 や 回 転 し て も 不 変 な も の で あ る 。 そ の 値 は 差 を 表 す た め ,こ の 数 値が一番小さかったものをユーザーの輪郭の型として表示する。 ④化粧法の提案 化 粧 法 の 提 案 は ,② ③ で 求 め た パ ー ツ の 座 標 ,輪 郭 の 型 か ら 判 断 す る 。 理 想 の 顔 に 近 づ け る た め に シ ャ ド ー や ハ イ ラ イ ト を 入 れ る ポ イ ン ト を 表 示 す る 。ま た ,髪 型 の 提 案 も 行 う 。 方法と結果 言 語 は ラ イ ブ ラ リ で あ る OpenCV に 対 応 し ,1 年 次 に 学 習 し た C 言 開始 語 の 拡 張 版 で あ る C++を 使 用 し た 。一 連 の 流 れ は 図 5 に 示 し た 。ま ず 顔 を 撮 影 し ,そ の 画 像 を パ ー ツ の 座 標 を 取 得 す る プ ロ グ ラ ム と 輪 郭 を 判断するプログラムに渡す。このうちパーツ検出に関しては裏で自動 撮影 パーツ座標 輪郭認識 に動いていく。そして輪郭の判断ではサンプル画像と照らし合わせる こ と で 型 を 決 定 す る 。輪 郭 ,パ ー ツ の 座 標 の ズ レ か ら 化 粧 法 を 提 案 す る 。 化 粧 法 と は ,基 本 的 な シ ャ ド ー と ハ イ ラ イ ト ,髪 型 の 提 案 と な る 。 提 案 が終わり次第終了となる。本開発では各処理のプログラムは作り終え た が ,ま だ 1 つ の プ ロ グ ラ ム と し て 統 合 し て い な い 。 ま た ,GUI の デ ザ 理 想 と 差の表示 化粧法 提案 終了 イ ン ,プ ロ グ ラ ム の 正 確 性 共 に 実 用 化 に は 難 し い 段 階 に あ る の で 今 後 図 5 プログラムの流れ の改善が必要である。 考察 輪 郭 マ ッ チ ン グ の 正 確 性 を 高 め る た め に cvMatchShapes の 3 通 り の 方 法 で 行 っ て い る 反 面 ,照 ら し 合 わ せ る サ ン プ ル 画 像 が 1 通 り ず つ し か な く ,マ ッ チ ン グ の 正 確 性 が 高 い と は 言 え な い 状 況 で あ り ,サ ン プ ル を 増 や す 必 要 が あ る 。ま た 二 値 化 の 際 に ユ ー ザ ー が 閾 値 を 選 ぶ こ と で 処 理 を し て い る が ,輪 郭 が 綺 麗 に 出 に く い た め ,輪 郭 が 綺 麗 に 出 る 閾 値 を 探 す 必 要 が あ る 。 パ ー ツ の 検 出 で は ,標 準 で OpenCV に 搭 載 さ れ て い る 分 類 器 で の 認 識 が 限 定 さ れ て い る た め ,他 の 手 法 と の 組 み 合 わ せ 等 と い っ た , Haar-like 特 徴 と は 別 の 検 出 方 法 の 研 究 が必要である。 参考文献 1) Gary Bradski Adrian Kaehler 松 田 晃一:詳解 OpenCV― ― コ ン ピ ュ ー タ ビ ジ ョ ン ラ イ ブ ラ リ を 使 っ た 画 像 処 理 ・ 認 識 , オ ラ イ リ ー ・ ジ ャ パ ン , (2009) 2) OpenCV 2 プ ロ グ ラ ミ ン グ ブ ッ ク 制 作 チ ー ム : OpenCV 2 プ ロ グ ラ ミ ン グ ブ ッ ク , マ イ ナ ビ ,(2011) P / P 9 課題名 IdeaTable 発表者氏名 穴久保拓磨 指導教員 西澤吉郎 荒木夏彦 高浜陸生 古荘航 松島勲旺 柳澤慧典 背景・目的 会 議 を 円 滑 に 進 め る た め に タ ン ジ ブ ル ユ ー ザ ー イ ン タ ー フ ェ イ ス を 作 成 し ,応 用 す る 。タ ンジブルユーザーインターフェイスとは, “ 直 感 的 ”或 い は“ 直 接 的 ”な 操 作 の で き る 媒 体 のことを言う。今回の研究では,机上に置いた物体に情報を関連付けてコンピュータで処 理・ビジュアル化し,複数人による直感的な編集を可能にすることを目指す。 理論 物 体 を コ ン ピ ュ ー タ に 認 識 さ せ る た め に reacTIVision と い う 専 用 の 読 み 取 り シ ス テ ム を 用 い て,物体とタッチ操作時の指の動きを識別する。置か れた物体から映像を生成するためにオブジェクト指向 言 語 で あ る C++を 用 い , openFrameworks( 以 下 oF とする)というライブラリを使用し,図 1 のようにプ 図 1 装置の概要 図 1 本体の構造 ロ ジ ェ ク タ を 使 っ て 映 像 を 投 影 す る 。 処 理 は Core i3 2120T と GeForce GTX550Ti,DDR3 8GB を 搭 載 し た デ ス ク ト ッ プ PC で 行 い , 物 体 を 置 き , 映 像 を 表 示 す る た め の 筐 体 は 幅 1100mm, 奥 行 き 800mm, 高 さ 1000mm の ワ イ ヤ ー シ ェ ル フ を 利 用 し て い る 。 ま た , 他 の コ ン ピ ュ ー タ で 実 行 す る 拡 張 機 能 の 開 発 に は python と い う 言 語 を 使 用 し て い る 。 方法と結果 IdeaTable の 基 本 的 な 構 造 を 述 べ る 。 物 体 に 貼 り 付 け ら れ た マ ー カ ( 図 2) や 押 し 付 け た 指 を ア ク リ ル 板 越 し に 筺 体 内 部 の web カ メ ラ を 通 じ て , reacTIVision に 認 識 さ せ ,情 報 の 入 力 を 行 い ,プ ロ ジ ェ ク タ の 映 像 を ア ク リル板に出力する。また,プロジェクタの映像光がマーカ認識の妨げにな 図 2 マーカ例 ら な い よ う に web カ メ ラ は 赤 外 線 の み を 受 光 す る よ う に 改 造 し ,ア ク リ ル 板 の 裏 か ら 赤 外 線 LED で マ ー カ と 指 を 照 ら す 。 ソ フ ト ウ ェ ア 面 で は ,web カ メ ラ を 通 じ て 置 か れ た 物 体 に 貼 ら れ た マ ー カ の ID・座 標 ・ 向 き や ア ク リ ル 板 に 押 し 付 け ら れ た 指 の 座 標 を reacTIVision が そ れ ぞ れ 認 識 し , oF を 中 P / P 10 心 に 構 築 さ れ た ソ フ ト ウ ェ ア が , マ ー カ ID の オ ブ ジ ェ ク ト 化 や ユーザの操作によって情報の付加と編集を行い,マーカの情報を わかりやすく映像化する。 そ の 結 果 , マ ー カ の ID を 認 識 し , そ れ ぞ れ に 対 し て 描 画 や 音 楽再生,ビデオ再生,などの処理を振り分け,実際に動作させる ことに成功している。そして,事前に資料をマーカと関連付けて 図 3 マーカと表示された映像 おくことで,迅速に資料を提示することも可能にしている。しかし,カメラ内での座標系 と描画時の座標系にズレが生じており,置いたマーカの下にオブジェクトが描画されず, 少しずれた場所に描画されることがある。誤認識も多く,マーカや指の認識率は五割程度 で あ っ た 。 さ ら に python を 用 い て 「 ら く ら く 会 議 マ ネ ジ ャ ー 」 と い う ソ フ ト ウ ェ ア を 作 成 し ,Twitter・RSS・ネ ッ ト 掲 示 板 と ソ ケ ッ ト 通 信 を 行 い ,そ の 場 に い な い 会 議 参 加 者 か ら の 意 見 や ニ ュ ー ス も リ ア ル タ イ ム で 表 示 で き る よ う に し よ う と し た が , IdeaTable 本 体 との連動は確認できていない。 考察 今後の改善策として,ハードウェア面ではマーカや指の認識率を上げるために赤外線 LED の 配 置 や 光 量 の 調 整 な ど の 工 夫 ,ソ フ ト ウ ェ ア 面 で は カ メ ラ の 座 標 と プ ロ ジ ェ ク タ の 映像座標のズレをシステム稼働中に手動で調整できるプログラムの追加,などが考えられ る 。ま た ,oF の 原 点 座 標 は 左 上 で あ る が ,文 字 や 図 形 を 表 示 さ せ や す く す る た め に 原 点 座 標 を 画 面 の 中 央 と し て 扱 う よ う に す る こ と で IdeaTable に 全 方 向 性 を 持 た せ る こ と が で き る と 思 わ れ る 。そ し て , 「 ら く ら く 会 議 マ ネ ジ ャ ー 」の 通 信 を 確 認 し ,デ ー タ の 検 索 や 保 存 機能を追加していきたい。その他にマーカの認識アルゴリズムを改善して高速化を図るこ とや動的にオブジェクトの振る舞いを変更できる機能や,外部の音をマイクなどで聴きと っ て 会 議 の 盛 り 上 が り を 数 値 と し て 計 測 す る 機 能 ,フ ェ リ カ ポ ー ト を 使 っ て Suica の よ う な IC カ ー ド で 個 人 情 報 を 登 録 す る 機 能 を 追 加 す る こ と な ど を 検 討 し て い る 。 参考文献 1) 細 田 謙 二 : Python 入 門 [2& 3 対 応 ], 株 式 会 社 エ ス キ ュ ー ビ ズ ム ( 2010 年 ) 2) yoppa.org: http://yoppa.org/ 3) 田 所 淳 : Beyond Interaction, ビ ー ・ エ ヌ ・ エ ヌ 新 社 ( 2010 年 ) 4) of-dev: http://www.openframeworks.cc/ 5) Armin Ronacher: http://flask.pocoo.org/ P / P 11 課題名 ユーザー拡張機能式のコミュニケーションツールの開発 発表者氏名 梅原悠志 指導教員 仲道嘉夫 神谷俊介 齊藤誠 清水星哉 西山舜 矢内原創 背景・目的 管理者もユーザーもソフトの開発に簡単に参加できるようにすれば,ソフトの改良が早 く進み,より使いやすいソフトになる。また,管理者の負担も減らすことができる。今回 対 象 と す る ア バ タ ー チ ャ ッ ト は AmebaPigg や meet-me な ど で わ か る よ う に , あ ら か じ め ア バターのテクスチャなどが用意されており,それを組み合わせて使うようになっている。 しかし,まだ制限が多く,ユーザーが機能を拡張できるようにはなっていない。そこで, ユーザーが開発に参加できるタイプのアバターチャットを作成した。 理論 ア バ タ ー と は ソ フ ト の 中 で 利 用 者 の 分 身 と し て 動 く 物 体 で ,座 標( XYZ)と 回 転 角( 仰 角 , 左 右 角 ), 表 示 さ れ る 3D オ ブ ジ ェ ク ト と テ ク ス チ ャ な ど の 情 報 を 持 つ オ ブ ジ ェ ク ト と し て 定 義 さ れ る 。3D の 仮 想 空 間 に ,利 用 者 の ア バ タ ー を 同 時 に そ こ に 表 示 さ せ チ ャ ッ ト を 行 う 。 空間内の移動は,現在の座標と回転角を用いて移動後の座標を計算する。物体同士の衝突 判定は,それぞれの物体が収まる直方体を考え,それらが重なっているかで判定する。 今 回 , 拡 張 機 能 と し て は , 機 能 を も っ た 自 作 NPC( Non-Player Character) の 追 加 , ア バターの作成を考えた。ユーザーが書いた新しい機能などのコードを実行時に読み込むこ とで,ユーザーが欲しいと思った機能がすぐに反映されるようにした。 方法と結果 ク ラ イ ア ン ト プ ロ グ ラ ム は ,メ イ ン 処 理 と 描 画 処 理 に 分 け て 実 装 す る 。メ イ ン 処 理 は C# で 書 き ,ア バ タ ー の 3D フ ァ イ ル の 管 理 や ,座 標 の 計 算 ,サ ー バ ー と の 通 信 な ど を 行 う 。描 画 処 理 は , ネ イ テ ィ ブ な 入 出 力 に 強 い Flash で 行 い , 主 に メ イ ン 処 理 か ら 受 け 取 っ た 情 報 P / P 12 を元にして描画を行う。また,キー入力の受け取りも担当す る。チャットの実行画面を図 2 に示す。 サーバープログラムは,クライアントから送られる認証処 理と,各ユーザーから現在の座標やチャットの発言などの情 報を受信し,他のユーザーにその情報を送る処理を行う。 拡 張 機 能 は , さ ま ざ ま な 拡 張 に 対 応 す る た め , C#で 書 い た コードを読み込み,新しい機能を実装できるようにした。し 図 2 実行画面 か し ,C#と こ の ソ フ ト の 仕 様 に 関 す る 知 識 が な い と 実 際 に 拡 張 機 能 を 作 る の は 難 し か っ た 。 そ こ で ,拡 張 機 能 の 一 部 で あ る NPC を C#を 知 ら な く て も 作 成 で き る よ う に 独 自 の ス ク リ プ トを開発した。用意されている関数が限られているため,意図的に処理を重くするような 悪意のあるコードは書きにくくなった。この開発環境として,関数を日本語で書かれた項 目 か ら 選 択 す る 形 式 の エ デ ィ タ を 作 成 し ,C#の 知 識 が な い 人 で も 開 発 が で き る よ う に し た 。 他にも,ユーザー拡張機能式にしたことで,従来のソフトと比較して,以下の問題点が出 てきた。 1.ア バ タ ー の 作 成 に セ キ ュ リ テ ィ の 問 題 が 残 っ て い る 。 2.テ ク ス チ ャ に 公 序 良 俗 に 反 す る 画 像 を 貼 る こ と が で き る 。 3.ス ク リ プ ト で ユ ー ザ ー が 作 成 す る 機 能 で は , で き る こ と が 制 限 さ れ る 。 考察 拡張機能は,独自スクリプトを作ったことでプログラミングの知識のない人も開発が行 えるようになった。ユーザーが自由に機能を拡張できるようにするためには,ただ基盤と なるソフトを用意するだけでなく,拡張機能の開発環境を充実させる必要があることが分 か っ た 。 今 後 , C#で 書 い た コ ー ド で 機 能 を 追 加 し た 場 合 の 安 全 性 の 問 題 に 対 し , レ ジ ス ト リ を 操 作 す る よ う な 危 険 な 機 能 を 使 用 で き な い よ う に す る 。 ま た , NPC 作 成 ス ク リ プ ト で 使用可能な関数を充実させることで,よりユーザーがソフトの開発に参加できるようにす る。 参考文献 ・ 萌 え ろ ! CG 道 場 + 「 http://ktg.sblo.jp/」 3D フ ァ イ ル 作 成 の 参 考 ・ DOBON.NET「 http://dobon.net/」 .NET Framework の 情 報 P / P 13 課題名 HMD を 利 用 し た AR 技 術 の 研 究 発表者氏名 吉野雄介 指導教員 都留裕貴(西澤吉郎) 宮坂豪 高橋岳士 梶原智 片桐佑理 背景・目的 本研究では,現実には存在しない仮想の物体を現実に重ね合わせてより直感的に操作, 管理できるようにするソフトウェアの作成を目的とする。 理論 我 々 は 目 的 を Augmented Reality 技 術 (以 下 AR) と Head Mounted Display( 以 下 HMD) と い う 機 器 を 用 いて実現することにした。システム の構成は図1のようになっており, 図 1 中 の 手 に 持 っ て い る 箱 は AR マ ーカーを立方体にした操作用マーカ 図1 システムの構成図 ーで,その右側にあるのは,同様に立方体にしたモードマーカーである。モードマーカー の上のブロックは仮想の物体を示している。 仮想の物体を現実に重ね合わせるには,画像検出,画像の編集,そして出力といった処 理が必要となる。また,仮想の物体を直観的に操作するためには,眼前で実際に物がある よ う に , 指 で 操 作 す る 方 が 望 ま し い と 我 々 は 考 え た 。 そ の た め に HMD に カ メ ラ を 取 り 付 け て利用した。 方法と結果 3DCG 作 成 ソ フ ト は あ ら か じ め 用 意 し て あ る ブ ロ ッ ク を 組 み 合 わ せ て CG を 作 る 方 法 を 採 用 し た 。 3DCG 作 成 ソ フ ト が 行 っ て い る 処 理 に つ い て 説 明 す る 。 ま ず 画 像 処 理 を 行 う 。OpenCV と い う C,C++言 語 の ラ イ ブ ラ リ を も ち い て ,画 像 を 取 得 し て い る 。取 得 後 に AR マ ー カ ー の 座 標 の 検 出 も 行 う 。 図 2 AR マ ー カ ー 座 標 の 検 出 に は , C 言 語 の ラ イ ブ ラ リ で あ る ARToolKit を 用 い る 。 次にイベントの検出を行う。ここでは,操作用マーカーを振るという動きや操作用マー カー二つでブロックをつまむといった判定を,マーカーの頂点座標の推移や2つのマーカ P / P 14 ー間の距離から検出している。また,次のモデル編集では,先ほどのイベントの検出で判 定した動きによって,モードごとの処理を行っている。モードはブロックを作成して移動 させるモード,ブロックを削除するモード,ブロックを保存するモード,くっつけたブロ ックを切り離すモードの5つを実装した。 最 後 に , 描 画 を 行 う 。 こ こ で は , 上 記 の 処 理 で 作 成 さ れ た ブ ロ ッ ク を OpenGL と い う C 言 語 の ラ イ ブ ラ リ を 用 い て カ メ ラ か ら の 画 像 に 重 ね て 描 画 し ,そ れ を HMD に 出 力 し て い る 。 考察 機能面においては上記の機能を達成することができた。しかし,動作が不安定であった ことや,実際の人間の動きをあまり考えなかったこと,使用する際にマーカーを手で隠し てしまうこと,移動中に物体が操作用マーカーから外れてしまうこと,接合する際の判定 が厳しいなどの問題が発生した。 操作がうまくいかなかった原因としては次の2つが挙げられる。操作用のマーカーが カメラに対して鋭角になりすぎると,マーカーが検出できなくなってしまう点,マーカー を操作する位置が画面内の一点に集中してしまい,マーカーが隠れてしまうという点であ る。 これらの解決策として,手の甲などを利用して現在の指の方向と位置の推定に役立てる ことや,移動していないと思われるマーカーの位置をほかのマーカーの位置関係から補完 することなどが考えられる。 参考文献 ・ Fletcher Dunn, Ian Parberry: 実 例 で 学 ぶ ゲ ー ム 3D 数 学 , O'Reilly 社 ( 2008 年 10 月) ・ 橋 本 直 : ARtoolKit 拡 張 現 実 プ ロ グ ラ ミ ン グ 入 門 , ASCII( 2011 年 6 月 ) ・ 谷 尻 豊 寿 : ARtoolKit プ ロ グ ラ ミ ン グ テ ク ニ ッ ク , カ ッ ト シ ス テ ム ( 2010 年 10 月 ) ・ http://www.civil.kumamoto-u.ac.jp/matsu/kahen.pdf 二 値 処 理 (2012 年 10 月 ) ・http://imagingsolution.net/ openCV の 導 入 ,画 像 処 理 の ア ル ゴ リ ズ ム (2012 年 ・ http://kgussan.ojaru.jp/opengl-matrix.html ・ http://kougaku-navi.net/ 「工学ナビ」 10 月 ) 行 列 計 算 関 係 ( 2012 年 10 月 ) ARToolKit 導 入 等 ( 2012 年 10 月 ) P / P 15 課題名 筋電の取得と筋肉の電気的制御について 発表者氏名 國柗慧 指導教員 石川幸治 原健太 横山正太朗 和田正之 渡邉貴美子 背景・目的 筋電を取得,解析する技術や,外部から電気刺激によって筋肉を制御する機能的電気刺 激 (FES)の 技 術 と い う も の は 現 在 ,主 に 医 療 分 野 で し か 利 用 が み ら れ て い な い 1) 。こ の 技 術 を医療関係従事者,もしくはそれに特化した技術者がいない場所,環境であっても誰でも 簡単に扱える技術として確立することができれば,様々な分野で応用が見られるのではな いだろうか。 そこで本研究では,筋電を利用した技術について理解を深めるとともに,筋電の技術を 簡単で安価に扱えるものにするための回路やシステムを構築する。 理論 人間が筋肉を収縮させる際には筋肉の内部で筋活動電位が発生しており,外部からの電 極を用いることによってその活動を読み取ることができる 2) 。また,筋肉に電気的な刺激 を与えることで,人間の筋肉を意図的に収縮させることができる 1) 。 方法と結果 まず,生体信号の取得の方法,及び,筋肉 の 電 気 的 制 御 の 方 法 を 確 立 し た (図 1)。 筋電の取得に関しては,生体信号などの高 インピーダンス出力の増幅に適した計装アン プを採用した。利用した計装アンプは内部に 差動増幅回路の構造を持つアンプである 3) 。 差動増幅回路は 2 つの入力を持ち,その差を 取ることでノイズをカットしつつ増幅する 4) 計 装 ア ン プ で 十 分 に 増 幅 し た 後 ,OP ア ン プ の 。 図 1: シ ス テ ム 図 非反転増幅回路を用いてセンサとして扱いや す い 0〜 5[V]ま で の 電 圧 に な る よ う 調 整 を 行 う 。 ま た , 不 要 な 周 波 数 帯 を 減 衰 さ せ る フ ィ ル タ (HPF:High Pass Filter, LPF:Low Pass Filter, BEF:Band Elimination Filter)を 作 成した。ユニバーサル基板上に自作した回路を使用することによって,実際に筋電波形を P / P 16 観 測 す る こ と が で き た (図 2)。 ま た , ユ ニ バ ーサル基盤で作成していた回路をプリント基 板化,小型化など工夫することで,回路の組 み立てや扱いが簡単に行えるようにした。 筋肉の電気的制御に関しては,同様の研究 を行なっている大学の研究室からの情報を参 考にしつつ,電気刺激の特性を決めた 5) 。作 成した装置を利用し,人体に電圧を印加する 図 2: 取 得 し た 筋 電 波 形 ことでの筋肉の収縮が確認できている。 考察 実際に筋電の取得を行う装置を自作したところ,普段私達の手に入るような素子で安価 に回路を製作することができた。この回路は筋電の有無や大きさが分かる程度の性能を持 っており,十分に活用できるものとなった。また,回路をプリント基板化したことで,回 路を簡単に組み立てられるようになったため,気軽にこの回路を使ってもらうことが期待 で き る 。な お ,高 速 フ ー リ エ 変 換 (FFT)を 利 用 し た 周 波 数 解 析 を 行 い ,筋 電 の 周 波 数 帯 を 中 心に取得したところ,より正確な筋電の検知が可能であることも確認できた。一方,筋肉 の電気的制御に関しては,安全装置や回路構成などさらに考慮するべき部分があるため, これらを修正した後,回路のプリント基板化や配布を行っていく予定である。 参考文献 1)島 田 洋 一:機 能 的 電 気 刺 激( FES)の 現 状 と 将 来 展 望 , Akita J Med, 36, 1-17(2009) 2)平 成 20年 度 臨 床 生 理 学 講 義 第 二 回 骨 格 筋 の 電 気 現 象 と 筋 電 図 , http://www.dent.niigata-u.ac.jp/physio/riha.pdf (新 潟 大 学 大 学 院 医 歯 学 総 合 研 究 科 摂 食 環 境 制 御 学 講 座 口 腔 生 理 学 分 野 山 村 健 介 ) 3)LT1167 デ ー タ シ ー ト http://cds.linear.com/docs/Japanese%20Datasheet/j1167fb.pdf 4)馬 場 清 太 郎 : ト ラ ン ジ ス タ 技 術 5 月 号 , CQ 出 版 社 , p.91 (2012) 5)ユ ニ ー ク & エ キ サ イ テ ィ ン グ 研 究 探 訪 | 電 気 通 信 大 学 No.14 知能機械工学専攻・横井浩史教授の電気刺激装置の開発 http://www.uec.ac.jp/research/information/column/14.html P /
© Copyright 2026 Paperzz