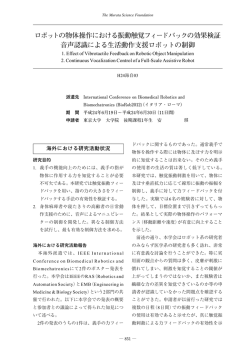
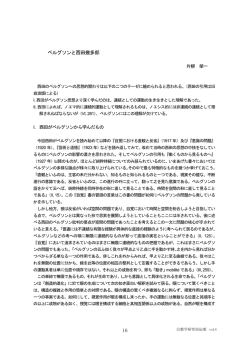
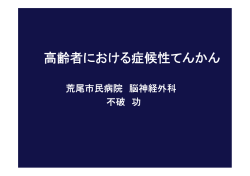
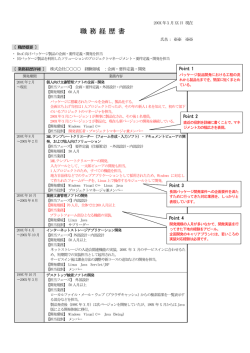
日本ロボット学会誌 No. xx, pp.1∼4, 200x Vol. xx 1 事例紹介 幼児教育環境におけるソーシャルロボット研究とその応用 Social Robotics Research and its Application at the Child Education Environment 中 文 英∗ 田 Fumihide Tanaka∗ ∗ ∗ 筑波大学 大学院システム情報工学研究科 / JST さきがけ Graduate School of Systems and Information Engineering, University of Tsukuba / JST PRESTO 1. は じ め に ソーシャルロボットの研究は,本質的に何のためにある のであろうか? おそらく目的は大別して二つの方向性があ り,第一に人間を支援するロボット技術開発に知見をつな げようとする向き(工学的有用性)と,第二に人間を知る ための手段としてロボットを用いようとする向き(科学的 学術性)があるものと思われる.本論文では,子どもの教 育現場という筆者らの研究フィールドにおける,こうした 図 1 カリフォルニア州サンディエゴの保育所における,子ども たち(1∼2 歳)とロボットの長期的なインタラクション観 察研究.[1]∼[3] PNAS/National Academy of Sciences ソーシャルロボット研究の事例を紹介する. 2. 研究事例1:探索型の基礎研究 [1]∼[3] (Copyright 2007) 最初に紹介する事例は,筆者らが 2004 年から 3 年間にわ たり米国カリフォルニア州サンディエゴの保育所にて行っ 室に導入したのは 6ヶ月弱の期間であったが,ここで撮影さ た探索型研究(exploratory study)である.ここでは,小 れた実験映像の分析には 1 年半以上の時間を要した.分析 型の二足歩行人型ロボットを日々継続的に教室に導入し,自 から得られた知見はロボットのハードウェアに関わるもの 律動作/遠隔操作による様々な行動パターンを試しながら, からソフトウェアや運用面など多岐にわたる(詳細は [1]∼ 子どもたち(月齢 1∼2 歳)との間で起こるインタラクショ [3] 参照)が,ここでは特に,次章以降で説明する教育支援 ンを観察した(図 1 参照).当初,筆者らはロボット技術を 研究につながった知見について説明する.まず,教室内に 用いて子どもたちの教育支援を行いたいという漠然とした おける子どもたちの行動分析から判明したのは,ここで導 目的は有していたものの,具体的にどのような技術を用い 入したロボットが,教室内にある他の玩具と際立って異な てどのような場面を対象とするかについてはまだ明確には る扱われ方をされていたことである.特に,子どもたちの 判断しかねていた.また,当時研究開発の進められていた 世話欲をかきたてるようなロボットの振る舞いは,子ども エンターテインメント・ロボットの流れからも, 「いかにし たちの興味を長期間にわたり強く引きつけることが分かり, て人間を長く引きつけることのできる(簡単には飽きられ このカテゴリーに属するインタラクションの発生頻度は他 てしまわない)ロボットを作れるか」という問題意識も感 の玩具における頻度と比較して顕著に大きく,かつ長期に じていたが,どこから手を付ければ良いのか分からずにい わたり継続した.こうしたインタラクションの例としては, た.そこで,未だ完全では無いものの当時利用し得る最新 バッテリー残量の少なくなったロボットが(安全停止のた 鋭のロボットを教室に導入して,継続的に子どもたちとの めに)床の上に寝ようとすると子どもたちがロボットの上 間の関わりを観察する中から具体的な教育支援の場面や子 に毛布をかけようとする場面や,教室内でロボットが転倒 どもたちを飽きさせないための必要条件を探すことにした. した際に子どもたちが起き上がりを助けようとする場面な 3 年間の研究期間のうちで実際にロボットを継続的に教 どが挙げられる. こうした探索型研究では,あらかじめ想定していなかっ 原稿受付 キーワード:Child - Robot Interaction, Robotics for Children, Care-receiving Robot, Telerobotics, Learning and Development * 〒 305-8573 茨城県つくば市 天王台 1-1-1 * 1-1-1 Tennodai, Tsukuba, Ibaraki, Japan (ZIP: 305-8573) 日本ロボット学会誌 xx 巻 xx 号 た問題も次々と発生し,無秩序さながらに様々な知見が集 結される.これらの知見は無理にまとめるべきものでは無 いのかもしれないが,筆者らは 1 章にて述べたような二つ の方向性で大まかに整理を試みている.第一の方向性は人 —1— 200x 年 xx 月 田 2 中 文 英 間を支援するロボット技術開発につなげようとするもので, Teacher 具体的には,次章以降で説明する子どもたちの学習支援や 教育環境拡張の試みである.第二の方向性は人間理解の手 段としてロボットを用いようとするもので,子どもたちと ロボットの間の社会性発達過程(長期間にわたる共生を通 して子どもたちはどのようにロボットと関わり受容してい くか)を量的/質的双方の分析法により記述しようとした. 代表的な分析結果としては,子どもたちとロボットの間で起 Care-taking こる様々なインタラクションをハプティック行動分析(「触 る」という行動要素を元にインタラクションのパターンを 分類し分析する方法)したものがある.ここでは,子ども Children たちとロボットの間のふれあい(パターン)が,数ヶ月間 にわたる共生を通じて子どもたち同士のふれあいに収束し ていく様子が提案する定量的尺度と共に示されている.ま た,こうした「ロボット−人間」間の分析と,前述の「ロ ボット−玩具」間の分析を並べることによって, 「子どもた ちにとってロボットはどのようなものとして受け入れられ Robot “Learning by Teaching” 図 2 ケアレシーバー型ロボットの枠組:子どもたちの自然な 世話欲を活かし,子どもたちにロボットを教えてもらう ことによって逆に子どもたち自身への学習効果を高めよ うとする.[4] [5] ていったのか?」という問いに対して答えようとした. 3. 研究事例2:ケアレシーバー型ロボットを用いた 子どもの学習支援 [4] [5] 2 章にて述べた保育所に身を置き続け,日々子どもたち 胸部スクリーンの画像提示と共に音声発話する RUBI を導 入したところ,RUBI を導入しない同年齢帯の別の教室の 子どもたちと比較して有意に未知語獲得を促進されるとい う例が示されている. や保護者の方々,教師や保育所スタッフの方々と話してい 一方で筆者らは,別のスタイルのロボットを用いた子ども るうちに,教育環境を充実させて子どもたちの学習を支援 たちの学習支援の試みも始めている.前例における RUBI するためのロボット技術に大きな期待と有望性を感じるに や各種のチャイルドケア・ロボット [8] [9] は,ケアギバー 至った.そして,当初は漠然としていた具体的な寄与の仕 (care-giver)型,つまりロボットから子どもたちに何かを 方についても自然に対象が定まってきた.本章では,2 章 教えようとするものであった.これに対し筆者らは,ケアレ にて述べた探索型の基礎研究から派生した,子どもたちの シーバー(care-receiver)型,つまり逆に子どもたちが教 学習支援に関する研究事例を紹介する. えるタイプのロボット(図 2 参照)に着目している [4] [5]. 筆者らが前述の探索型研究を行なっていたカリフォルニ ここでは,教育者である教師や親が,所望の教育トピック ア大学サンディエゴ校,Machine Perception Laboratory (例:あいさつや感謝の言葉)を定めた上で,子どもたち では,同時に子どもたちの未知語学習を支援するロボット にそのトピックをロボットに対して教えさせる.ロボット を開発している [6] [7].RUBI と名付けられたこのロボット は子どもたちの自然な世話欲を引きだすよう,当初は容易 は,探索型研究で得られた知見を導入して子どもたちの教 に間違えたり不完全なふるまいをしたりするようデザイン 育支援を目的にゼロから作られたものである.例えば,前 されており,子どもたちの教示と共にトピックを学んでい 述のように探索型研究からハプティックなインタラクショ くようにする.こうした,いわば「Poor な」ロボットの面 ンの有為性が示されていたため,このロボットは胸部に大 倒を見ることにより,結果として子どもたち自身もそのト きなタッチスクリーンを有し,そこで提示されるコンテン ピックに対する学習を深めること(Learning by Teaching) ツプログラムを中心に子どもたちとのインタラクションを が真の狙いである.そして,このケアレシーバー型ロボッ 試みようとする.また,探索型研究時に用いていたロボッ トの着想には,まさに前章で述べた探索型研究の知見(ロ トと比較して単純な自由度構成をしているが,これは探索 ボットは子どもたちの世話欲を強く喚起する)が活かされ 型研究の知見から最有用と判断された少数の可動部(手・ ている. 首など)をより分かりやすく示す意図がこめられている. 現在,筆者らはケアレシーバー型ロボットの導入効果を RUBI は現在も開発が継続中であるが,すでに興味深い 確認・検証する目的で実証実験を行なっている.今回の実 導入効果も報告されている.例えば [7] では,前述の探索型 験フィールドは,つくば市の大型ショッピングセンター内に 研究と同様の月齢 1∼2 歳の教室に,そこの子どもたちが ある子ども向け英会話教室(株式会社こども英会話のミネ 触れたことのない言語体系であるフィンランド語の単語を ルヴァ)であり,とくにマミー Kids クラス(0∼2 歳)と JRSJ Vol. xx No. xx —2— xx, 200x 幼児教育環境におけるソーシャルロボット研究とその応用 3 ンス [11] から近年ではアンドロイド [12] まで,数多くの遠 隔操作ロボットが提案されてきた.こうした高度なロボッ ト技術も近年では一般層にも認知の広がりを見せ,多くの 人々から「もうすこしで手の届きそうな夢の技術」と期待 されている感がある.しかしながら一方で,こうした最新 技術と現実応用の間には,おそらく今なお多くの問題が存 在しているものと思われる.こうした問題を顕在化させて 世に示し,同時に解決への努力を進めるためには,2 章に 図 3 ケ ア レ シ ー バ ー 型 ロ ボット を 実 装 す る Aldebaran Robotics 社製の Nao と,子ども向け英会話教室内で典型 的に用いられる学習教材: (左写真)ボキャブラリーカー ド:動物の絵などが英語名と共に記載されたもの. (右写 真)様々な図形が様々な色で描かれたポスター. て述べた研究事例と同様に,やはり探索型のスタイルを含 んだ実証実験を行なうのが最適であると考えた. そこで筆者らは,前章にて説明した子ども向け英会話教 室を拠点の一つとして,2 章にて述べた米国カリフォルニ ア州の教室を含む各地間のインターネット接続の上に,子 幼児クラス(3∼5 歳)に在籍する子どもたちの中から参加 どもたちが遠隔地に置いたロボットを遠隔操作することに 者を募集し,通常のレッスンとは別の時間に同じ教室にて よって現地の活動に実時間参加することが可能なシステム ロボットを導入したプログラムをテストしている.導入す (図 4 参照)の開発に着手した.本研究は JST さきがけ「情 るロボット機体は Aldebaran Robotics 社の Nao(全長約 報環境と人」研究領域における課題(H21∼H24 年度)と 58cm)を用いており,基本的に教室外部から遠隔操作され して行なわれ,国内拠点間での開発からはじめて最終年度 ている.このロボットが参加している点以外は通常のレッ までに日米間での実証実験を行なうことを目標としている. スンとまったく同等の雰囲気下で進められ,担当教師と数 現在,筆者らは,最初のターゲットタスクを遠隔地間の 人の子どもたち,保護者たちと混じって安全確認を担当す 子どもたち同士での物の受け渡しに設定し,これを行なう る実験者が教室の内部に居る.ロボットは優等生らしくふ ためのロボットインタフェースの開発とテストを実施中で るまったり,逆に意図的に間違いを犯すようにふるまった ある.物の受け渡し(Give and Take)は教室内にて最も りするよう遠隔操作され,それらに対する子どもたちの挙 頻繁に行なわれるインタラクション形態の一つであり,教 動を観測・分析する. 師たちもレッスン内にて頻繁にこの行動要素を取り入れる すでに筆者らは,狙いとする現象,つまりレッスン中に ため,物の受け渡しが遠隔地間の子どもたち同士(あるい 教師が提示する様々な学習タスク(例:カードの絵の名前 は子どもと教師の間)で可能になれば,数多くの教室活動 当てや色形当て:図 3 参照)をうまくクリアできないロボッ に参加可能となる.しかしながら,このタスクには,ロボッ トが,周囲の子どもたちの世話欲をかきたて,子どもたち トハンドの設計といった問題以外にも,ソーシャルなイン からロボットへの自然な教示が発生することを多くの場面 タラクションに特有の重要な問題が含まれていることが明 で観測している.さらに,こうしたケアレシーバー型のロ らかになりつつある.それは,インタラクションにおける ボットを教室に導入することにより,通常,散漫になりや タイミングの問題である.筆者らが行なっている予備実験 すい子どもたちの注意や集中力を,このロボットへのケア の結果,本システムは通常のインターネット上で実装しよ 意識を通じて教師が提示した学習タスクそのものに長時間 うとした場合,数百ミリ秒オーダーの遅延が発生すること 引きつけることが結果的に可能であるという,教育現場に が判明した.この遅延は通信上の伝送遅延,画面上の動き とって有益な効果も見えはじめてきている. を知覚する際の認知的な遅延の双方を含む.システムの仕 4. 研究事例3:世界の子どもたちをつなぐ遠隔操作 ロボットシステム [10] 組を多少なりとも推察できる大人のユーザであれば,ある 程度の遅延があったとしても,それが実験室環境での試行 であればなおさらのこと対応可能であると思われる.しか 次に紹介する研究事例は,遠隔操作ロボット技術(Telerobotics)を用いて,こうした子どもたちの教室空間を拡張 しながら本研究ではユーザは子どもたちであり,かつ,現 し,より魅力的かつ有益な教育環境を提供しようとするも 影響は致命的なものに成りうる. 実の教室活動中という文脈の中で行なわれるため,遅延の のである.近年,Skype 等の普及により遠隔 TV 会話は多 筆者らはこの問題を,発達心理学における社会的随伴性 くの人々が比較的容易に用いることのできる技術となった. (Social contingency)の研究 [13] [14] と結び付けつつ解法 そしてこれらの技術を用いて遠隔教育や異文化交流を行な を模索している.社会的随伴性は人間が発達早期より有す おうとする試みも各所で始められている.一方で,研究分 る原始的コミュニケーション能力の一つであり,自らの行 野においては 1980 年代より進められているテレイグジスタ 動に随伴して起こる外界イベントへの注意志向と関連する. 日本ロボット学会誌 xx 巻 xx 号 —3— 200x 年 xx 月 田 4 中 文 英 謝辞 本研究は,文部科学省グローバル COE プログラ ム「サイバニクス:人・機械・情報系の融合複合」および Japan Side US Side JST 戦略的創造研究推進事業さきがけの支援を受けて行わ れている. 参 考 文 献 [ 1 ] F. Tanaka, A. Cicourel and J.R. Movellan: “Socialization between toddlers and robots at an early childhood education center,” Proceedings of the National Academy of Sciences of the USA, Vol.104, No.46, pp.17954–17958, 2007. [ 2 ] 田中:“人間型ロボットと乳幼児の日常インタラクションの研究”,発 達する知能 ∼知能を形作る相互作用∼(共著書).pp.175–212,シュ プリンガー・ジャパン,2008. [ 3 ] F. Tanaka, J.R. Movellan, B. Fortenberry and K. Aisaka: “Daily HRI evaluation at a classroom environment: reports from dance interaction experiments,” Proc. of the 1st Annual Conf. on Human-Robot Interaction (HRI-2006), Salt Lake City, USA, Mar. 2006, pp.3–9. [ 4 ] 田中,小嶋,板倉,開:“子どものためのロボティクス:教育・療育支 援における新しい方向性の提案”,日本ロボット学会誌,Vol.28 No.4 pp.87–94,2010. [ 5 ] F. Tanaka and T. Kimura: “Care-receiving robot as a tool of teachers in child education,” Interaction Studies, Vol.11 No.2 pp.263–268, 2010. [ 6 ] J.R. Movellan, F. Tanaka, I.R. Fasel, C. Taylor, P. Ruvolo and M. Eckhardt: “The RUBI project: a progress report,” Proc. of the 2nd Int. Conf. on Human-Robot Interaction (HRI-2007), Arlington, USA, Mar. 2007, pp.333–339. [ 7 ] J.R. Movellan, M. Eckhardt, M. Virnes, and A. Rodriguez: “Sociable robot improves toddler vocabulary skills,” Proc. of the 4th ACM/IEEE Int. Conf. on Human-Robot Interaction (HRI2009), La Jolla, USA, Mar. 2009, pp.307–308. [ 8 ] http://www.nec.co.jp/products/robot/childcare [ 9 ] http://www.irobibiz.com/english/index.php [10] 田中:“世界の子ども達をつなぐ遠隔操作ロボットシステム(インフラ 構築)”,第 24 回人工知能学会全国大会(JSAI-2010)予稿集,2010. [11] S. Tachi: Telecommunication, Teleimmersion and Telexistence, IOS Press, 2003. [12] 石黒:アンドロイドサイエンス ∼人間を知るためのロボット研究∼. 毎日コミュニケーションズ,2007. [13] J.S. Watson: “The perception of contingency as a determinant of social responsiveness,” In E.B. Thoman (eds), Origins of the Infant’s Social Responsiveness. pp.33–64, 1979. [14] M. Miyazaki and K. Hiraki: “Delayed intermodal contingency affects young children’s recognition their current self,” Child Development, Vol.77 pp.736–750, 2006. 図 4 日米の教室間にまたがる遠隔操作ロボットシステム:最 初のターゲットでは,日本側の子どもの動きをモーショ ンキャプチャによりとらえ,米国側に置いたロボットを 簡略なマスター・スレーブ制御により動かす.操作者の 利き手には振動モータ付のデータグローブを付けてもら い,モニタースクリーンを見ながら米国サイドの子ども たちと交流する.図 3 に示したカードゲーム等を最初の ターゲットとしており,ロボットがカードをつかむと振 動フィードバックが操作者に伝わる. 例えば,乳児においても自らの行動(発声など)の直後に付 随して外界で何らかのイベントが発生すると,そのイベン トに強く注意が向くことが知られている.つまり,社会的 随伴性が適切に実装されていれば,人間は一定の遅延があっ てもその対象に注意を向けることが可能であると推察する ことができる.しかし,社会的随伴性のデザインパターン は無限に存在するため,適切な社会的随伴性をシステム上 に実装するためには発達心理学における実験的研究の知見 が参考になる.そこで筆者らは現在,発達心理学でこれま で調べられている様々な実験条件を分析しながら,子ども たちがより社会的随伴性を捉えやすく,教示なしに直感的 に操作が可能なインタフェースの条件を調査している.調 査実験は,遅延の程度や条件を柔軟に制御可能な国内拠点 間で行なっており,子どもたちの反応を調べながらシステ ム開発を進めている. 5. お わ り に ロボティクス分野において,人間とのインタラクション 田中 文英(Fumihide Tanaka) 2003 年東京工業大学 大学院総合理工学研究 に関連する知見は着実に増えつつある.そして,人間を対象 にすることによって様々な周辺分野とのつながりが産まれ, 様々な専門性を有する研究者たちの興味を集めはじめてい る.筆者らは,こうした現状において,同時に一般社会と のつながりも盛んなものとしていくことが重要なのではな いかと考えている.本論文で述べてきた幼児教育といった 場面以外にも,介護や高齢者支援をはじめとして,具体的 な場面で社会からの期待が大きい場面は少なくない.環境 条件が制御された研究室/実験室を出てこうした実フィー ルドに出ることは,予期せぬハプニングなどから逆に新た な発見も多く,社会貢献と研究推進の両側面においてプラ スに働く可能性を秘めている. JRSJ Vol. xx No. xx 科 知能システム科学専攻 博士課程修了.博士 (工学).同年ソニー(株)入社.エンターテ インメント・ロボットの研究開発に従事.2004 年からソニー・インテリジェンス・ダイナミ クス研究所(株)へ出向,同年秋より University of California, San Diego 客員研究員.2008 年から筑波大 学 大学院システム情報工学研究科 知能機能システム専攻 准教 授.2009 年 10 月より JST さきがけ「情報環境と人」領域の 研究員を兼任.研究分野は,人間−ロボット間インタラクショ ン,発達学習,社会的相互作用,教育支援など.2001 年人工知 能学会全国大会 優秀論文賞,2005 年 IEEE 国際会議 RO-MAN Best Paper Award などを受賞.JSAI,SICE 等会員. (日本ロボット学会正会員) —4— xx, 200x
© Copyright 2026 Paperzz