レーザーポインターを用いたプレゼンテーションシステムの提案
高 見 澤
大 輔†
現在プロジェクターの小型化が進み,安価に手に入るようになったことからプロジェクターを用い
たプレゼンテーションが頻繁に行われるようになっている.しかしながら,スライドの説明はスクリー
ン上で行われるのに対しその操作は PC 上で行われているため説明が途切れがちになってしまう.こ
れを解決するために本稿ではレーザーポインターを用いたプレゼンテーションシステムを提案する.
1. は じ め に
1.1 背
Screen
景
Camera
近年プロジェクターの小型が進み,さらに高解像度
PC
なプロジェクターが安価に手に入るようになっている.
この事から大学等での大教室における授業や企業の発
表会等で,分野を問わず PC を用いたプレゼンテー
ションが頻繁に行われている.
しかしながらプレゼンテーションに適したインター
フェースが存在しているとは言い難く,プレゼンテー
Laser
Pointer
Projector
ターはスライドに集中しなければならないにも関わら
ずスライドの操作を PC 上で行うことが多く途切れが
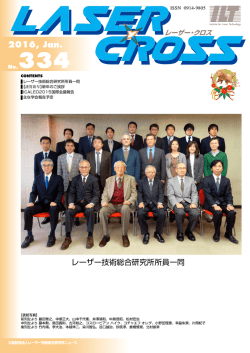
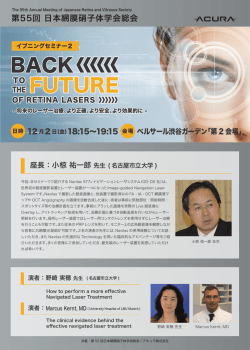
図 1 システムの概要
ちになってしまう.そこでプレゼンテーションに特化
したインターフェースが求められている.
1.2 目
的
プロジェクターを用いたスクリーン上にスライドを
2. システムの概要
本システムではレーザーポインターの軌跡に着目
投影するような大画面で行うプレゼンテーションでは,
し,これがある動きをしたときに適当なスライド操作
その説明にレーザーポインターが良く使用される.そ
を行う.
こで,レーザーポインターを用いたインタラクティブ
1),3),7)
なシステムが提案されている
.レーザーポイン
本システムでは PC に接続されたカメラとプロジェ
クター,レーザーポインターで構成される(図 1).
ターはスクリーン上でスライドの注目して欲しい点や
レーザーポインターは波長が 532nm の緑色光(コク
重要な点などを強調するような動作を繰り返す操作が
ヨ サシ-81N)のものを,スポットの検出には USB
多く,スライド中の一点をポインティングし続けるこ
R
接続のカメラ(LogicoolWebcam
Pro 9000)を用
2)
とはあまりなくまた,困難である .そこで本研究で
いた.以下に本システムの簡単な処理の流れを示す.
はレーザーポインターを動かす動作に着目し,ある動
(1)
きをした場合に特定の操作を行うプレゼンテーション
システムを提案する.
スクリーン上のレーザーポインターの点(スポッ
ト)を検出し,その座標を求める.
(2)
直前の座標との差分からスポットの移動量を計
算する.
† 明治大学計算理論研究室
Meiji University Theory of Computing Lab
(3)
移動方向の組み合わせ(ジェスチャー)から入
力しようとしている操作を判定する.
レーザーポインターを用いたプレゼンテーションシステムの提案
Spot
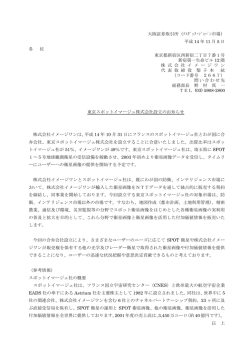
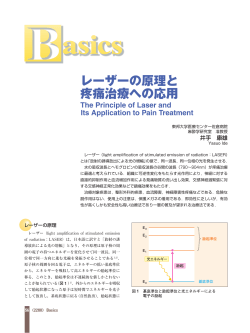
図2
(4)
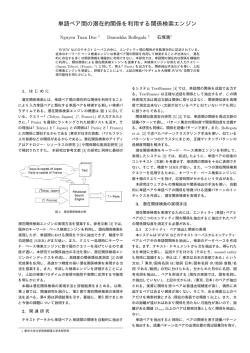
図 3 減光された画像
スクリーン上でのポインティングの様子
結果から適当な操作を発行しスライドを操作
する.
2.1 スポットの検出
スポットの検出ではまずカメラからスクリーンの画
像を取得し,その画像中から適当な領域をスポットと
して検出する.検出の方法をいくつか列挙する.
(1)
画像中の各画素の画素値を調べスポットの色に
合致する領域をスポットとして抽出する.
(2)
画像をグレースケールに変換し画素値が最も高
いものをスポットとして抽出する.
(3)
画像を 2 値化し,最大の領域をスポットとして
抽出する.
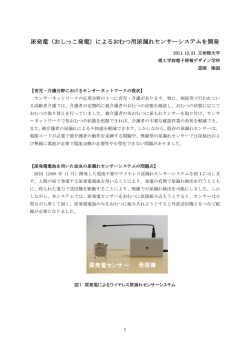
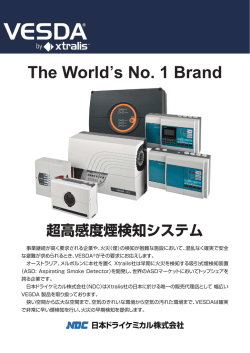
図 4 グレースケール画像
1 の方法はカメラからの画像をそのまま使うことが
出来るものの,スポットの色が既知であることとスライ
標を画像中の画素値が最も高い画素として検出するこ
ド中に似た色が存在しないことやカメラの性能といっ
とができる(図 4).
た制約が存在する.2 の方法では画像を一度グレース
2.1.2 方
ケールに変換する必要があり画素値が高い画素が複数
この方法は文献 4) を参考にしている.
ある場合正しく抽出することが難しい.3 の方法では
適切な閾値を設定する必要がある.
本システムでは 2 と 3 の方法を実装し,以下にその
詳しい実装を述べる.
2.1.1 方
法
2
法
3
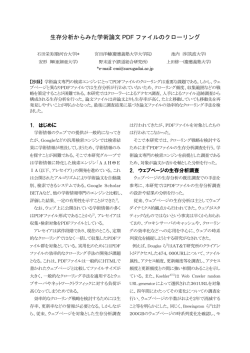
この方法では適切な閾値を設定することでスポット
のみが抽出し,その領域の中心をスポットの座標とす
る.閾値の設定については後述のキャリブレーション
の間にスライドをスポットのないスクリーン上に投影
し,その画像からもっとも高い画素値を閾値として設
この方法は文献 3),7) を参考に実装を行った.
定する.こうすることでプロジェクターによって投影
前提としてスライドはプロジェクターによってスク
されるスライドの光の強さを求められる,この値を使
リーン上に投影されているためスライド全体が光って
うことで2値化した画像からスポットを抽出すること
いるため図 2 のようにそのままカメラから取得した画
が出来る(図 5).
像ではスポットを抽出することが難しい.そこでレー
ザーポインターの特性によりスポットの光が強いこと
を利用する.カメラに減光のためのフィルターを装着
することでカメラへの入力光が抑えられ,スライド自
体の反射光や照明などの自然光を取り除くことが可能
となる(図 3).これによってカメラから得られた画
像をグレースケールに変換することで,スポットの座
2.2 ジェスチャー
次に検出されたスポットの座標からジェスチャーを
判定する方法について述べる.
2.2.1 スポットの移動方向の取り扱い
本システムでは移動の方向として 8 方向を採用し,
まずこれの取り扱いについて記述する.
各移動方向に対して図 6 のように数字を割り当てる.
レーザーポインターを用いたプレゼンテーションシステムの提案
Spot
図 5 2値化した画像
7
8
9
4
5
6
1
2
3
図6
6,7,9,6
移動方向(左),ジェスチャーの様子(右)
スポットの移動方向を記憶する際にこれらの数字を覚
みジェスチャーから,シンボル出力確率は経験則から
えることで,スポットの座標をその都度記憶する必要
事前に定める.実際に Viterbi アルゴリズムを適用す
がなくなりスポットの移動の扱いが容易になる.本シ
る際には,今入力されたジェスチャーから状態遷移確
ステムではこの移動方向の組み合わせをジェスチャー
立にバイアスをかけ登録されている各ジェスチャーの
と呼び,このジェスチャーに特定のショートカットキー
尤度を求め最大となったジェスチャーを入力に対する
を割り当てることでスクリーン上でスライドの操作を
もっとも適当なジェスチャーとする.また極端にジェス
行う.移動方向の入力について,斜め方向の入力は水
チャーの長さが異なる場合や入力されたジェスチャー
平方向と鉛直方向の座標の変位の比が 0.27 から 3.73
の長さが 1 以下の時には尤度の計算を行わない.
の間つまり 15 度から 75 度の間にある場合とし,そう
でない時に水平方向と鉛直方向で変位の大きい方を入
入力されたジェスチャーを G,状態集合を S ,状態
遷移確率を A,シンボル出力確率を B とすると,
力された方向として判断する.また同方向への連続し
G = {gt |t 番目の移動方向,
1 ≤ gt ≤ 9}
(1)
た入力は無視する.これは同じ方向の連続した入力は,
S = {si |1 ≤ i ≤ 9,各移動方向 }
(2)
その切れ目が操作者からは分かりづらく為である.
A = {aij |si から sj へ遷移する確率 }
(3)
B = {bij (gi )|gi を出力する確率 }
(4)
次にジェスチャーの判定方法について述べる.
2.2.2 ジェスチャーの判定
と定義される.出力確率 B は経験則からその値を設
ジェスチャーは上記の方法で移動方向の組み合わせ
定し,j = gt の場合もっとも高い値として j + ±45◦
として表すことが出来る(図 6).しかしながらプレゼ
の方向が続き,それ以外では前述の 3 方向よりも小さ
ンテーターが意図した通りのジェスチャーとして PC
い値を,5 は移動しなかったことを意味するので 0 を
側に判断させることは難しい.例えば右,左上,右
設定した.遷移確率 A は入力されたジェスチャー G
といったジェスチャーを考えたときに,実際にジェス
からその値を計算する.G を先頭から調べることで出
チャーとしては図 6 右のように判断されることがあ
力確率 B を用いて値を加算していき最終的に求まっ
る.このため入力されたジェスチャーと登録されてい
た値を遷移確率 A とする.各状態の初期確率は登録
るジェスチャーの完全一致では意図通りの操作を行う
されている各ジェスチャーの先頭の出現頻度と入力さ
ことが難しい.
れたジェスチャー G から求める.以上の遷移確率 A
そこで本システムでは入力されたジェスチャーから
と出力確率 B ,初期確率を用いて Viterbi アルゴリズ
登録されている各ジェスチャーの尤度を計算すること
ムを適用することで登録されている各ジェスチャーの
で,入力されたジェスチャーの判定を行っている.ジェ
尤度を求め最大なものを入力されたジェスチャーとし
スチャーは連続した移動方向の組み合わせであり,各々
て出力する.
の移動方向は次の移動法に影響を与えないのでジェス
またジェスチャー 1 つ 1 つの区切りとして一定時間
チャーを隠れマルコフモデルとして扱い Viterbi アル
スポットが検出されなかった時に,入力が終わったと判
ゴリズムによって各登録済みジェスチャーの尤度を求
定する.これはコマ落ちなどにより,実際にはスポッ
める.
トがスクリーン上にあるにもかかわらず PC 側では
各移動方向を状態として,状態遷移確立を登録済
スポットを検出することができず,プレゼンテーター
レーザーポインターを用いたプレゼンテーションシステムの提案
の意図通りの操作をすることができなくなってしまう
のを防ぐためである.加えて続けて長時間スポットが
検出され続けたときにはジェスチャーの判定を行わな
い,これはプレゼンテーターがジェスチャーをする際
に途中でそれをやめたい場合にポインティングするこ
とでキャンセルすることが出来るようにするためであ
る,またこれにより本来の用途としてスライドをポイ
ンティングしているときにはその都度ジェスチャーの
判定をせずに済ますことができる.
以上によりプレゼンテーターの意図したジェスチャー
を判断し,適当な操作を返す.
2.3 キャリブレーション
図7
スクリーンに角度が着いている場合
本システムではカメラから得られた画像からスポッ
トの座標を検出し,その移動量を計算することで移動
方向を蓄積しジェスチャーの判定を行う.そのためプ
レゼンテーターの意図する通り正しく移動量を計算す
ポットの移動量を計算することが可能になる.
3. まとめと今後の課題
るにはスクリーンとカメラが平行に配置されている必
本研究ではレーザーポインターのストロークに着目
要がある,もし極度に角度のついた場合やスクリーン
したプレゼンテーションシステムの提案とその実装を
とカメラの距離が極端に離れている場合には適切に移
行った.
動量を計算することができない(図 7).しかし厳密
本システムでは USB 接続されたカメラからスクリー
にスクリーンとカメラを平行に配置することは難しい.
ン上のスポットを検出し,そのストロークからジェス
この問題を解決するためにキャリブレーションを行い,
チャーを判定してスライドの操作を行う.これにより
画像平面とスクリーン間での座標変換行列を求める.
プレゼンテーターは意識をスクリーンへ向けたまま
3),5),7)
を参考にし,スクリーン上に投影さ
スライドの操作を行うことが可能となり,従来の PC
れたスライドの4隅と画像上の 4 隅を一致させること
でスライドの操作を行っていた場合と比べ途切れる
により変換行列を求める.
ことなくプレゼンテーションを行うことができる.ま
先行研究
具体的には以下の式をそれぞれの座標について解く
た,ジェスチャーによってスライドを操作するのでス
ことで 3 × 3 変換行列を求める.この変換行列は自由
クリーン上の任意の場所でスポットを動かすことでス
度が 8 なので,残りの1要素は行列の大きさが 1 にな
ライドの操作ができ,柔軟な操作性を有している.
るように決定する.
ωxi
p1
ωyi = p4
ω
p7
一定時間スポットが検出されないことと長時間スポッ
トが検出され続けることのみであるためジェスチャー
p2
p3
p5
p6 Yi (5)
p9
1
p8
Xi
キャリブレーションの手順を以下に示す.
(1)
(2)
(3)
しかしながら,ジェスチャーとポインティングの差は
とポインティングを明確に分けることが難しくジェス
チャーが意図した通りに認識されない問題がある.さ
らにスライドの送りや戻りといった簡単な動作である
スクリーンに投影されているディスプレイのサ
ならばこのジェスチャーによる操作のみで十分である
イズを取得する.
ものの,メモなどのよりインタラクティブな操作に対
カメラからスライドの投影されたスクリーンの
しては十分な操作性を有しているとは言い難くまた,
画像を取得し,その画像をクリックすることで
プレゼンテーション以外の操作への拡張を考えた場合
画像平面上の座標を取得.
にも不十分である.
取得したそれぞれの座標から変換行列を求める.
スポットの検出に関してはカメラの性能への依存が
これにより画像平面とスライド間の変換行列を求め
高く性能が低いカメラでは正しい検出は精度が下がり,
ることができ,移動量を計算する際にカメラからの画
またカメラの既存の設定では検出が難しくコントラス
像から得たスポットの座標をこの変換行列によってス
トや露出を上げてやる必要があるものの本システムか
ライド上の座標へと変換することでスクリーンとカメ
らではそういった調整が行えないため直接カメラのパ
ラ間に角度のある場合や距離のある場合でも正しくス
ラメーターを調節する必要がある.
レーザーポインターを用いたプレゼンテーションシステムの提案
最後に本システムでは現段階ではまだ,操作性や使
用感などの評価実験を行っていないので早急にこれを
行い本システムの優位性を示す結果を得る必要がある.
参 考
文
献
1) Afterglow http://www.afterglow.biz/
2) Brad A. Myers, Rishi Bhatnagar, Jeffrey
Nichols, Choon Hong Peck, Dave Kong, Robert
Miller and A. Chris Long. Interacting at a
distance: measuring the performance of laser
pointers and other devices. In Proceedings of
ACM CHI Conference on Human Factors in Computing Systems, pp. 33-40. Apr. 2002.
3) 福地健太郎 レーザーポインタの軌跡を用いた
映像パフォーマンスの試みインタラクション 2005
論文集 (情報処理学会シンポジウムシリーズ Vol.
2005, No. 4) pp.63-64
4) Lapointe J.-F, Godin G. On-Screen Laser
Spot Detection for Large Display Interaction.
Proceedings of the IEEE International Workshop on Haptic Audio Environments and their
Applications (HAVE’2005)
5) R. Sukthankar, R. Stockton, M. Mullin.
Smarter Presentations: Exploiting Homography in Camera-Projector Systems. Proceedings
of International Conference on Computer Vision, 2001.
6) Rzeznik, J., Barnes S.E., Breckon, T.P. Gesture Recognition using a Laser Pointer In Proc.
5th European Conference on Visual Media Production November 26th - November 27th, 2008.
London, UK. pp SP-01
7) 張進,田中二郎 レーザポインタを用いたスト
ロークによる大画面向けインタラクション手法 筑波大学大学院博士課程システム情報工学研究科
修士論文
© Copyright 2026 Paperzz