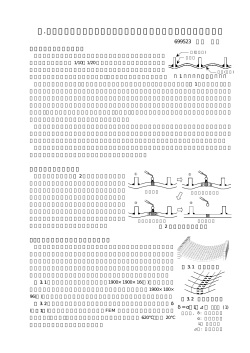
九州工業大学学術機関リポジトリ Title Author(s) Issue Date URL 1次元ヒストグラムを用いた図形抽出法に関する研究 中島, 翔太 2010-03-01T00:00:00Z http://hdl.handle.net/10228/4751 Rights Kyushu Institute of Technology Academic Repository 博士学位論文 1次元ヒストグラムを用いた 図形抽出法に関する研究 Study on Method for Extraction of Figure using One-Dimensional Histogram 平成 21 年度 九州工業大学大学院 工学研究科 電気工学専攻 電子通信システム工学分野 博士後期課程 07586501 中 島 翔 太 指導教員:芹 川 聖 一 教授 第1章 序論 ............................................................................................................................ 1 1.1 背景............................................................................................................................... 1 1.2 関連研究 ....................................................................................................................... 1 1.3 本論文の目的と構成 ..................................................................................................... 2 第2章 1 次元ヒストグラムを用いた直線と円の抽出法 ........................................................ 4 2.1 緒言............................................................................................................................... 4 2.2 本手法の基本概念 ......................................................................................................... 5 2.3 Polytope 法 .................................................................................................................... 5 2.3.1 基本アルゴリズム ................................................................................................... 5 2.3.2 関数最小化のための Polytope 法の操作手順 ........................................................... 7 2.4 抽出法の概要 ................................................................................................................ 9 2.4.1 直線の抽出法 .......................................................................................................... 9 2.4.2 円の抽出法 ........................................................................................................... 13 2.4.3 惰円の抽出法 ........................................................................................................ 16 2.5 抽出実験 ..................................................................................................................... 20 2.5.1 直線の抽出実験 .................................................................................................... 20 2.5.2 円の抽出実験 ........................................................................................................ 21 2.5.3 楕円の抽出実験 .................................................................................................... 22 2.6 本手法と Hough 変換法との比較 ................................................................................. 23 2.6.1 Hough 変換法 ........................................................................................................ 23 2.6.2 比較実験 ............................................................................................................... 25 2.7 第3章 結言............................................................................................................................. 27 1 次元ヒストグラムを用いた任意図形の抽出法 ...................................................... 28 3.1 緒言............................................................................................................................. 28 3.2 任意図形の抽出法 ....................................................................................................... 28 3.3 任意図形の抽出実験 ................................................................................................... 33 3.3.1 実験条件 ............................................................................................................... 33 3.3.2 実験結果 ............................................................................................................... 34 3.3.3 他の手法との比較 ................................................................................................. 37 3.4 第4章 結言............................................................................................................................. 39 複雑な画像における図形抽出法 ............................................................................... 40 4.1 緒言............................................................................................................................. 40 4.2 探査図形と 1 次元ヒストグラムの関係 ....................................................................... 40 4.3 中心座標パラメータの推定 ......................................................................................... 41 4.4 改良した提案手法を用いた実験 ................................................................................. 43 4.5 重心点抽出の適応が可能な開曲線 .............................................................................. 49 4.6 図形の重なりを考慮した図形抽出 .............................................................................. 50 4.7 結言............................................................................................................................. 53 第5章 参考文献 謝辞 結論 .......................................................................................................................... 54 第1章 序論 1.1 背景 近年の情報技術の目覚しい発展に伴い,ロボットや自動車などのインテリジェント化が急 速に進められている.例えば,高齢者や障害者が安心安全に暮らすための介助ロボットや, 家庭内,病院内で自ら運搬や掃除を行う作業用ロボットは,多くの研究が行われその一部で は実用化されているものもある[1][2][3].現在の日本では,急激な少子高齢化に伴う高齢者の 増加によって,介護者の需要が増える一方,その役割をする若者は減少している.今後もこ の現象は続くと考えられるため,その作業の一部をロボットが代役を担うことが求められる. また,日常生活における家事や病人の介助に時間を割かれている人達にとって,ロボットが その作業を肩代わりできれば,それらの時間を別のものに有効に使うことができるようにな る.このようなロボットは,人がコントロールするものとは異なり,自ら状況を判断し行動 する必要がある.こうしたロボットは,自律型ロボットと呼ばれ,カメラやセンサを用いて 自身の動作や周りの環境を理解し行動する.現在では,計算機の急速な発達により,カメラ から取得した画像情報を使用している研究が数多く行われている[4][5].最近では,画像認識 を用いた機器は日常生活まで普及してきている.例えば,動きながら身の回りの人の顔を判 断できるロボット[6][7]や自動車の危険回避を補助するシステム[8]では,画像処理が応用され ているように,その関わりも大きくなってきている.その中でも特に,移動を行いながら目 標物体を認識し空間を把握するロボットでは,搭載したカメラで得られた画像データから所 望の図形をすばやく認識する必要がある[9].もし,誤って抽出したり,抽出するために時間 を多く要したりしてしまうと,事故につながる可能性がある.そのため,高速かつ正確な図 形認識は,画像認識の研究分野において重要な課題とされ,今までに多くの研究がされてき た.今後,このようなロボットが世の中に普及していくためには,できるだけ低コストであ ることが望ましい.そのため,価格の低い低スペックの計算機でも動作できるように,簡易 な図形抽出アルゴリズムで多種の図形に対応できる手法が求められている. 1.2 関連研究 一般に,直線や円などを抽出するために用いる手法として Hough 変換(Hough transform; HT)[10]が代表的な手法として挙げられる.HT は直線抽出のために用いられ[11] [12],後に 円や楕円の抽出法として拡張する方法が提案された[13][14].この手法はノイズに頑健で,ア ルゴリズムが容易な点において有効とされてきた. HT の特徴として,「画像中の直線が途 中で切断していても良好な結果が得られる」,「ノイズの影響を受けにくい」などの利点が ある.一方,「画像中の各画素点に対して,パラメータ空間と呼ばれる投票空間における軌 跡を描く必要があるため処理に時間がかかる」,「検出する精度を上げるためにパラメータ 空間を細かく分割する必要があり,パラメータ空間を記憶しておくためのメモリが膨大にな る」,「図形を表すパラメータが増えるにつれ膨大な処理時間・メモリ空間が必要となる」 1 などの問題点がある.これらを解決するために,検出すべき直線や円のパラメータがどの範 囲にあるか既にわかっている場合,パラメータ空間での軌跡を,その限定された範囲内だけ で描くなどの効率化の手法が提案されている[15][16].また,投票において,始めは解像度の 低いパラメータ空間を用いて,次に頻度の多い空間のみ再投票を行い段階的に解像度を高め る手法も,メモリ空間を減らす手法として代表的である[17][18].HT における直線は 2 つの パラメータで表現できるので,パラメータ空間は 2 次元である.これに対して,円は 3 次元, 楕円は 5 次元である.このように,図形を表すパラメータが増加するとパラメータ空間の次 元も増加し,HT に必要な計算メモリ量と計算コストも膨大な量に増加する.そのため,実 用的には楕円や高次の図形には適応できず,直線,円などの単純な図形のみに限定されてし まう. そこで,任意の図形も抽出できるように拡張したものが,一般化 Hough 変換(Generalized Hough Transform;GHT)である[19].任意の幾何学的図形は,形状とポーズ(平行移動(tx, ty),回転角度 θ,スケール s)の組み合わせで表現できる.GHT では,形状に関する情報を 定義表としてもち,ポーズに関する 4 つのパラメータを表す 4 次元空間に対して投票を行う. しかし,この手法も HT と同様に非常に多くのメモリ空間と処理時間を要する.そのため, この問題を解決するために多くの改良法が提案されている[20][21][22].その中でも高速一般 化 Hough 変換(First Generalized Hough Transform;FGHT)は処理時間を大幅に削減できる改 良手法である[23][24].この手法は,従来の GHT に比べ高速な図形抽出処理を行うことがで きるが,抽出対象の図形は相似変換不変のみであり,縦横比の異なる図形には適応できない. 一方,縦横比の異なる図形に適応することのできる手法は,円弧の当てはめを用いているた め,直線で構成される図形を抽出するのは難しい[25].他の手法としては,フーリエ変換[26], 遺伝的手法[27],幾何学ハッシング[28]を用いるものがある.しかし,[26]で抽出する対象の 図形の輪郭線が連続でなければならず,[27]と[28]は処理時間が非常に多くかかるといった問 題点が残されている. このように,多くの画像から図形を抽出する手法が提案され,現在でも研究が続けられて いるが,どの手法も計算機資源を多く消費したり,抽出対象が特定の図形に特化されていた りするなどの問題を抱えている.そこで,簡易なアルゴリズムで抽出対象の図形を限定しな い手法が求められている. 1.3 本論文の目的と構成 本論文では,自律型ロボット等の空間把握や物体認識において重要な課題となる,従来に ない全く新しい概念を用いた,直線・円・任意図形抽出法を提案する. 本手法の図形抽出法では,1 次元ヒストグラムと多次元の最小化アルゴリズムの一種であ る Polytope 法[29][30]を用いる.このヒストグラムには,2 つの性質がある. (1) 図形を表すパラメータが変化すると,ヒストグラムの分布は変化する. (2) ヒストグラムの最頻度の値が最大となるとき,正しい図形パラメータが得られる. これらの性質を利用し,本論文では Polytope 法を用いてヒストグラムの最頻度の値が最大と 2 なるときの図形パラメータを探索する.本手法では,このヒストグラムと最小化法を,直線・ 円・任意図形抽出のどの抽出においても同様に適応できるため,基本的なアルゴリズムは同 じである.本論文では,直線・円・楕円・任意図形の図形抽出について,提案手法の処理時 間や作業メモリ空間等の有効性を検証する. 第 2 章に提案手法を用いた直線・円の抽出法の原理について説明し,実験結果を示す.第 3 章では,提案手法を用いた任意図形抽出法の原理について述べ,実験結果を示す.第 4 章 では,複雑な画像における図形抽出を行い,提案手法の改良法について述べる.第 5 章では, 本提案手法のまとめを行い,本論文の結論を述べる. 3 第2章 1 次元ヒストグラムを用いた直線と円の抽出法 2.1 緒言 自律型ロボットが移動したり,物体を認識したりするためには,空間を把握することが必 要である.特に,移動中のロボットは,高速に物体を認識する必要がある.そのため,画像 認識の高速化についての研究が今までに多く行われてきた.その中でも,直線や円など単純 な図形を抽出することは,画像認識において,最も基本的な問題である.一般的な手法とし て,単純な直線や円の抽出においては HT[10]がよく用いられている.この手法はノイズに頑 健で,アルゴリズムがシンプルである.しかし,図形が複雑になるにつれて,つまり,図形 を表す関数のパラメータが多くなるにつれ,膨大な処理時間や作業メモリを必要としてしま う.また,これらの問題を解決するために HT の改良法やその他多くの手法が提案されてき た[15] [17].しかし,多くの提案手法が HT をベースとしている限り,十分な処理速度が得ら れないことや,抽出対象の図形に制限があるなどの問題点が残されている.もし,自律型ロ ボットや作業用機械において,高速化や省メモリ空間のために抽出対象の図形を制限する場 合,図形に応じた画像処理アルゴリズムを用意する必要がでてくる.その結果,計算機資源 をより多く消費してしまい,コストの増加につながる.そのため,理想的には,簡易なアル ゴリズムでプログラムサイズが小さく,高速で図形認識が行え,直線,円,楕円とともに統 一的であるアルゴリズムが求められる. そこで本章では,HT に変わる新しい手法として 1 次元ヒストグラムを用いた直線と円の 抽出法について説明する.これは,1 次元ヒストグラムと Polytope 法[29][30]を用いて画像中 の 2 値の線図形である直線と円を抽出する手法である. 4 2.2 本手法の基本概念 本節では,従来にない全く新しい概念を用いた,直線と円の抽出法を提案する.本手法で は図形データから 1 次元ヒストグラムを作成する.このヒストグラムは,以下の2つの特長 を持つ.(1)図形を表すパラメータを変化させると,ヒストグラムの分布が変化する.(2)ヒス トグラムの最頻度の値が最大となるとき,正しい図形パラメータが得られる(詳細は 2.4,2.5, 2.6 節で述べる).本論文では,Polytope 法を用いてヒストグラムの最頻度の値が最大となる ときの図形パラメータを探索する. Polytope 法とは,最小化アルゴリズムの一種であり,関数の導関数を用いずに最小値を求 めることができる.つまり,関数の最適化以外の探索にもその概念を適用できるこのため, ヒストグラムの探索に利用することが可能である.また,プログラムサイズが小さい.詳細 は 2.3 節で述べる. 2.3 Polytope 法 Polytope 法とは,多次元関数の最小化アルゴリズムの一種である.この手法は,関数の値 のみを評価して探索を行うため,最小化法として代表的である Newton 法のような導関数を 必要としない.また,プログラムサイズが小さく単純なアルゴリズムであり,計算量が少な くてすむという利点がある.Polytope とは,N 次元空間で N +1 個の頂点とそれらを結ぶ辺, 面からなる多面体である.例えば 2 次元の Polytope は 3 角形となり,3 次元では四面体とな る.ただし,この手法を最小化法として用いる場合は,これらの幾何学的な図形を頭に描く 必要はなく,単に N +1 個の点を考えるだけでよい.しかし,この手法は,基本的に単峰性の 関数しか最小化できないため,局所解に陥らないように関数に与える初期パラメータの検討 が必要な場合がある. 2.3.1 基本アルゴリズム 本項では,Polytope 法についての具体的な基本アルゴリズムを述べる.まず,2.3 節で述べ た各頂点を構成する N+1 個の探索点 xi のほかに,目的の関数 f(x)が最大の点 xmax,2 番目に大 きい点 xs,最小の点 xmin,i = max となる点を除いた全ての xi の重心 xg が必要となる.そして 次の手順 1~4 を繰り返すことにより探索が行われる. 5 手順1.【反射】: 手順1.【反射】 重心 x g を中心に x max の対称位置にある点 x r を生成 x r = (1 + α ) x g − α x max , ただし α > 0 , α は反射係数 手順2.【拡大】: 手順2.【拡大】 重心 x g に沿って x r を γ 倍延長した点 x e を生成 x r = γ x r − (1 − γ ) x g , 手順3.【縮小】: 手順3.【縮小】 ただし γ > 1 , γ は拡大係数 重心 x g に沿って x r を β 倍の点 x c を生成 x r = β x max − (1 − β ) x g , ただし 0 < β < 1 , β は縮小係数 手順4.【収縮】: 手順4.【収縮】 Polytope 全体を xi の方向へ半分に縮小する x i = 0.5( x min + x i ) , ただし i = 1, L , N + 1 6 2.3.2 関数最小化のための Polytope 法の操作手順 以下の 1~7 の手順を操作することにより関数最小化を行うことができる.また,その探索 時の挙動モデルを図 2.1(a)~(b)に示した. 1. 初期 Polytope を生成し,各探索点での関数評価を行う.ただし,Polytope を構成する 探索点の数は,N 次元関数の場合 N +1 個以上とする. 2. 各探索点の評価値 f (x ) の大小関係から最悪点 x max ,2 番目に悪い点 x s ,最良点 x min を 探し点 x max を除いた探索点の重心 x g を求める. 3. 4. 【反射】を行い, x r を求め関数 f ( x r ) の評価を行う. f ( x r ) < f ( x min ) なら【拡大】を行い, x e を求め f ( x e ) の評価を行う. このとき, f ( x e ) < f ( x r ) なら x max を x e に置き換えて手順 2 に戻る. f ( x e ) ≧ f ( x r ) なら x max を x r に置き換えて手順 2 に戻る. 5. f ( x s ) < f ( x r ) < f ( x max ) なら x max を x r に置き換えて【縮小】を行い. x c を求め関数 f ( x c ) の評価を行う. このとき, f ( x c ) < f ( x max ) ならば, x max を x c に置き換えて手順 2 に戻る. さもなければ, 【収縮】により,新しく生成した全ての点の関数値 f (x ) を評価して手順 2 へ戻る. 6. f ( x max ) ≦ f ( x r ) なら【縮小】を行い, x c を求め f ( x c ) の評価を行う. このとき, f ( x c ) < f ( x max ) ならば, x max を x c に置き換えて手順 2 に戻る. さもなければ, 【収縮】により,新しく生成した全ての点の関数値 f (x ) を評価して手順 2 へ戻る. 7. 上記 4~6 の条件以外の場合( f ( x min ) ≦ f ( xr ) ≦ f ( x s ) のとき), x max を x r に置き換 えて手順 2 に戻る. 7 高 低 (a) 最悪の点の反射 (b) 最悪の点の反射と膨張 (c) 最悪の点からの 1 次元の収縮 (d) 最良の点への全次元の収縮 図 2.1 Polytope 法の探索時の挙動 8 2.4 抽出法の概要 2.4.1 直線の抽出法 1 次元ヒストグラムを用いた直線抽出の流れを説明する.本論文で提案する直線の抽出方 法では,まず,図 2.2(a)に示すような,角度 θ を持ち,原点 0 を通る直線 l を考える.これを 探査直線と呼ぶ.次に,抽出対象となる直線 L を構成する全画素に対して,探査直線 l まで 垂線を下ろした距離 d を求める.このとき,図 2.2(b)に示すような,横軸を距離 d とした 1 次元ヒストグラムを作成する.図 2.2(c)に示すように,探査直線 l の角度 θ が検出対象の直線 L の角度と大きく異なっている場合,図 2.2(d)に示すように 1 次元ヒストグラムの分布がなだ らかになり,最頻度 fmax は小さくなる.一方,図 2.2 (e)に示すように,探査直線 l の角度 θ が抽出対象の直線 L の角度に近づくにつれ,図 2.2 (f)に示すように,分布が急峻となり,最 頻度 fmax の値は大きくなる.もし,図 2.2(g)に示すように探査直線 l の角度 θ が抽出対象の 直線 L の角度と一致する場合,距離 d はすべて同じになるため,図 2.2(h)に示すように,ヒ ストグラムの最頻度 fmax は最大となる.そこで,評価関数 E を以下のように定義する. E =1− f max N × VW (2.1) ここで,N は与えられた画像の全画素数,VW は 1 次元ヒストグラムへ d を投票するときの の裾をもった重みである.たとえば,図 2.3 に示すように,VW の重みで da に投票する場合, da から離れる毎に重み VW を 1 減らしながら投票する.この重みをつけることにより,ヒス トグラムの形状を緩やかにすることができる. この評価関数 E は,元ヒストグラムの最頻度 fmax が最大のときに最小となる.このとき, 抽出される直線 L の原点からの距離は dmax として得られる.つまり,得られた探査直線を距 離 dmax だけ平行移動すれば,抽出対象の直線を見つけることができる.この評価関数 E を最 小化するように,Polytope 法で角度 θ をパラメータとして探索を行う. ある探査直線図形のパラメータ θ で満足する評価関数が得られた場合,抽出が完了したと みなし,別の直線を見つけるためその直線を削除する.この操作を,繰り返すことにより複 数の直線の抽出が可能となる. また,画像に複数図形が存在する場合,式(2.1)をそのまま適用すると,抽出対象となる直 線 L 以外の直線を誤って検出してしまう場合がある.そこで,式(2.1)で得られる評価関数 E の値がある閾値 Eth 以下となる直線が得られた場合,その直線を構成する画素数を調べる. その画素数がある基準画素数 NE 以上であるときのみを,直線抽出完了とみなす. 9 抽出対象の直線 L y f d 探査直線 l θ fmax x 0 (a) 0 探査直線(初期値) (b) y d (a)の 1 次元ヒストグラム f fmax x 0 (c) 探査直線(探索途中) 図 2.2 d 0 (d) (c)の 1 次元ヒストグラム 1 次元ヒストグラムを用いた直線抽出(前半) 10 y f fmax x 0 (e) d 0 探査直線(探索途中) (f) y (e)の 1 次元ヒストグラム f fmax x 0 (g) 探査直線(探索結果) 図 2.2 d 0 dmax (h) (g)の 1 次元ヒストグラム 1 次元ヒストグラムを用いた直線抽出(後半) 11 f ≈ VW ≈ da 図 2.3 投票時の重み VW 12 d 2.4.2 円の抽出法 本項では,本手法を用いた円抽出の流れを説明する.まず初期値として,図 2.4(a)に示す ような,中心座標点 p(x0,y0)を持つ半径 r の円を考える.これを探査円 c と呼ぶ.その探査 円 c の中心座標点 p(x0,y0)から抽出対象となる円 C 上の任意の点までの距離を R とし,その 距離の比 R/r を d とする.円 C を構成する全画素に対して d を計算した後,横軸を d,縦軸 をその頻度 f として 1 次元ヒストグラムを作成する.なお,円の抽出では r=1 とする.この とき,探査円の中心座標点 p(x0,y0)が抽出対象の円 C の中心座標点から離れていれば,図 2.4 (b)に示すように,ヒストグラムの分布がなだらかになり,最頻度 fmax は小さくなる.一方, 図 2.4 (c)に示すように,探査円 c の中心座標点 p(x0,y0)が抽出対象の円 C の中心座標に近づ くにつれ,最頻度 fmax は大きくなっていく(図 2.4 (d)).ここで,最頻度 fmax の時の横軸 d の値 を dmax とする.図 2.4 (e)に示すように,探査円 c の中心座標点 p(x0,y0)が抽出対象の円 C の 中心座標に完全に一致する場合,最頻度 fmax は最大となる(図 2.4 (f)) .この時,距離 R(= r × d max )は,抽出対象となる円 C の半径となる.よって,最頻度 fmax の値が最大となれば, 円が求まる.そこで,最頻度 fmax の値が大きくなるにつれて誤差が小さくなる評価関数 E を 定義する. E =1− f max C ir × VW (2.2) ここで Cir は,ヒストグラムが最頻度 fmax となる時の横軸の値 dmax から求まる距離 × d max )を半径とした円の円周長である.VW は,1 次元ヒストグラム d へ投票する際の裾 R(= r をもった重みである.この評価関数 E は,1 次元ヒストグラムの最頻度 fmax が最大となると きに最小となる.そこで,Polytope 法を用いて,評価関数 E が最小となる中心座標点 p(x0, y0)の探索を行う.評価関数 E がある閾値 Eth 以下となる中心座標点 p(x,y)が得られた場合, 抽出が完了したとみなす.次に,他の円を見つけるため,画像データから抽出済みの円を削 除する.以上の操作を繰り返すことにより,複数の円の抽出が可能となる. 13 抽出対象の円 C y f r fmax R 探査円 c 0 (a) x d 0 探査円(初期値) (b) y (a)の 1 次元ヒストグラム f fmax x 0 (c) 探査円(探索途中) 図 2.4 d 0 (d) (c)の 1 次元ヒストグラム 1 次元ヒストグラムを用いた円抽出(探査途中) 14 y f fmax x 0 (e) 探査円(探索結果) 図 2.4 d 0 dmax (f) (e)の 1 次元ヒストグラム 1 次元ヒストグラムを用いた円抽出(探索後) 15 2.4.3 惰円の抽出法 本項では本手法を用いた楕円抽出法について述べる.楕円の抽出法は,円の抽出法の拡張 モデルであり,基本アルゴリズムは同じである.まず,1 次元ヒストグラムの作成法を述べ る.探査楕円を表すパラメータとして,図 2.5 に示すような中心座標点 p(x0,y0),長軸の長 さ a,短軸の長さ b=1,回転角度 θ を定義する.この定義に基づいて描いた楕円を探査楕円 c と呼ぶ.図 2.6 (a)に示すように,その探査円 c の中心座標点 p(x0,y0)から抽出対象となる楕 円 C 上の任意の点までの距離を R とする.その点方向の探査楕円 c の半径を r とし,距離の 比 R/r を d とする.楕円 C を構成する全画素に対して d を計算した後,横軸を d,縦軸をそ の頻度 f として 1 次元ヒストグラムを作成する.探査楕円の中心座標点 p(x0,y0)が抽出対象 楕円 C の中心座標点から離れていれば,図 2.6 (b)に示すように,分布がなだらかになり,最 頻度 fmax は小さくなる.一方,図 2.6 (c)に示すように探査楕円 c の中心座標点 p(x0,y0)が抽 出対象の楕円 C の中心座標に近づくにつれ,図 2.6 (d)に示すように,最頻度 fmax は大きくな っていく.ここで,最頻度 fmax の時の横軸 d の値を dmax とする.図 2.6(e)に示すように,探査 楕円 c の中心座標点 p(x0,y0),縦横比 a(長軸 / 短軸),回転角度 θ が,抽出対象楕円のそれ らの値と完全に一致する場合,図 2.6(f)に示すように,最頻度 fmax は最大となる.このとき, 抽出対象楕円の短軸の長さは dmax,長軸の長さは dmax×a となる. 評価関数 E は,円の検出と同じ式(2.2)を用いる.ただし,楕円抽出においては,短軸の長 さを dmax,長軸の長さを dmax×a とした時の楕円の円周長が Cir である. 本手法を用いた楕円抽出では,Polytope 法を用いて,評価関数 E が最小となる中心座標点 p(x0,y0),縦横比 a,回転角度 θ の探索を行う.評価関数 E がある閾値 Eth 以下となる中心座 標点 p(x0,y0),縦横比 a,回転角度 θ が得られた場合,抽出が完了したとみなす.次に,他 の惰円を見つけるため,画像データから抽出済みの惰円を削除する. 以上の操作を繰り返すことにより,複数の円の抽出が可能となる. 16 p(x0 ,y0) (a) 中心点 p(x0, y0) a ×1.5 b=1 a (b) 縦横比a θ=0 θ=π/4 (c) 回転 θ 図 2.5 探査楕円を表すパラメータ 17 抽出対象の惰円 C y f R fmax r 探査惰円 c x 0 (a) d 0 探査惰円(初期値) (b) y (a)の 1 次元ヒストグラム f fmax x 0 (c) 探査惰円(探索途中) 図 2.6 d 0 (d) (c)の 1 次元ヒストグラム 1 次元ヒストグラムを用いた惰円抽出(探査中) 18 y f fmax x 0 (e) 探査惰円(探索結果) 図 2.6 d 0 dmax (f) (e)の 1 次元ヒストグラム 1 次元ヒストグラムを用いた惰円抽出(探査後) 19 2.5 抽出実験 2.5.1 直線の抽出実験 本手法を用いて,直線の抽出実験を行う.探査直線の回転角度の初期パラメータθを 0[rad], 1 次元ヒストグラムへの投票の重み VW を 5,抽出完了とみなす閾値 Eth を 1.0 とした.複数 の図形抽出のために抽出済みの直線を削除し,計 10 回の探索を行った.また,誤検出を防ぐ ために直線が 100 画素以下の直線は除外した. 本実験で用いた抽出対象の画像を図 2.7(a)と図 2.8(a)に示す.図 2.7(a)の画像に含まれる図 形は 5 本の直線,図 2.8(a)の画像に含まれる図形は,4 本の直線,2 つの円,2 の楕円である. 画像サイズは横 320×縦 240 画素である.実験に使用した PC は DELL Dimension3100,OS: WindowsXP,CPU:Celeron-2.53GHz である. 実験結果を図 2.7(b)と図 2.8(b)に示す.図 2.8(b)より直線のみが正しく抽出できていること が確認できる. (a) 抽出対象の画像 図 2.7 (a) (b) 直線のみを含む画像における直線抽出 抽出対象の画像 図 2.8 抽出結果 (b) 抽出結果 複数の図形を含む画像における直線抽出 20 2.5.2 円の抽出実験 本手法を用いて,円の抽出実験を行う.円の抽出では,画像のサイズ(Xw,Yh)の 4 分の 1 のサイズ(Xw / 4,Yh / 4)を探査円の中心座標の初期パラメータ p(x,y)を初期値として探索する. そして,探索が終了する毎に x,y 方向に Xw / 4,Yh / 4 ずつ初期値を移動させて探索を行う. つまり,x 方向に 3 点,y 方向に 3 点の 9 点(=3×3)を初期座標として探索した.1 次元ヒスト グラムへの投票の重み VW を 5 とした. 本実験で用いた抽出対象の画像を図 2.9(a)と図 2.10(a)に示す.図 2.9(a)の画像に含まれる図 形は 4 つの円,図 2.10 (a)の画像に含まれる図形は,2.5.1 項と同様である.画像サイズと実 験に使用した PC は 2.5.1 項と同じである. 実験結果を図 2.9 (b)と図 2.10 (b)に示す.どちらの画像からも,円が正しく抽出できている ことが確認できる. (a) 抽出対象の画像 図 2.9 (a) (b) 円のみを含む画像における円抽出 抽出対象の画像 図 2.10 抽出結果 (b) 抽出結果 複数の図形を含む画像における円抽出 21 2.5.3 楕円の抽出実験 本手法を用いて,楕円の抽出実験を行う.楕円の抽出では,2.4.3 項と同様に,画像のサイ ズ(Xw,Yh)の 4 分の 1 のサイズ(Xw / 4,Yh / 4)を探査惰円の中心座標の初期パラメータ p(x,y) を初期値として探索する.探索が終了する毎に x,y 方向に Xw / 4,Yh / 4 ずつ初期値を移動さ せて探索を行う.つまり,x 方向に 3 点,y 方向に 3 点の 9 点(=3×3)を初期座標として探索す る.また,回転角度の初期パラメータθを 0[rad],縦横比の初期パラメータ a を 1 とし,1 次元ヒストグラムへの投票時の重み VW は 5 とした. 本実験で用いた抽出対象の画像を図 2.11(a)と図 2.12(a)に示す.図 2.11(a)の画像に含まれる 図形は 4 つの惰円,図 2.12(a)の画像に含まれる図形は,2.5.1 項と同様である.画像サイズと 実験に使用した PC は 2.5.1 項と同じである. 実験結果を図 2.11 (b)と図 2.12 (b)に示す.どちらの画像からも,惰円が正しく抽出できて いることが確認できる. (a) 抽出対象の画像 (b) 抽出結果 図 2.11 楕円のみを含む画像における楕円抽 (a) 抽出対象の画像 図 2.12 (b) 抽出結果 複数の図形を含む画像における楕円抽出 22 2.6 本手法と Hough 変換法との比較 2.6.1 Hough 変換法 一般に HT とは,線図形をなす複数の特徴点から直線や円などを抽出するために用いる手 法である.この手法はノイズに頑健で,アルゴリズムが容易な点において有効とされてきた. 以下に HT の概要を示す. いま,図 2.13(a)に示す x-y 直交座標系における一つの直線 y = ax + b (2.3) を考える.この直線に原点から垂線を下ろし,その長さをρc,x 軸とのなす角をθc とすれば, ρc = xcosθc + ysinθc (2.4) と表すことができる.すなわち,この極座標系では 1 点 (ρ c , θ c ) がわかれば,一つの直線が定 まることを示している.この点 (ρ c , θ c ) を,直線 y = ax + b の Hough 変換という.また,x-y 座標系の 1 点 P0(x0, y0)を通る傾きの異なる直線の集まりは,図 2.13(b)により x02 + y 02 = u 2 + v 2 ( x0 − u ) 2 + ( y 0 − v) 2 (2.5) u 2 + v 2 = ux 0 + vy 0 (2.6) であるので となる.ここで u = p cosθ , v = p sin θ とおくと ρ c = x0 cosθ + y0 sin θ (2.7) のように表される.このときのパラメータ (ρ c , θ c ) の軌跡を ρ − θ 平面に描くと図 2.13(c)のよ うになる.この直線が原点を通るとき ρ は最小値で 0 となり,この原点を通る直線と点 ( x 0 , y 0 ) で直行する直線 ρ は x 02 + y 02 となり最大値となる.一方,θ は θ0 = tan-1(y0 / x0)とす ると,θ0 = ±π/ 2 の範囲で変化することになる. 例えば,図 2.13(a)に示す点 P1,P2,P3 の各点を通る直線群の軌跡を ρ − θ 平面に描くと式 (2.7)に従って,図 2.13(c)のように表されるが,この 3 点が同一直線上に存在するとすれば, 式(2.4)に従って, ρ と θ の値が同じ値 (ρ c , θ c ) となる.すなわち,3 点に対応する ρ − θ 平面 上の軌跡は 1 点 (ρ c , θ c ) で交わることになる. 23 y P1 P2 ρc y=ax+b θc P3 0 x (a) x-y 平面 y y=ax+b P0(x0, y0) ρc ( u, v ) θ 0 (b) x P0(x0, y0)を通る傾きの異なる直線 θ π 点 P1 を通る直線群 点 P2 を通る直線群 π/2 ρ 0 -π/2 1.0 2.0 点 P3 を通る直線群 (c) ρ-θ平面 図 2.13 Hough 変換法 24 この原理を利用して,与えられた画像から直線を抽出することができる.例えば,画像中の n 個の点に対して ρ − θ 平面上では n 個の曲線が描かれ,このうち m(m≦n)個の曲線が 1 点 で交わっていれば,この m 個の点は同一直線上にあるということになる.この操作を HT で はパラメータ空間への投票と呼ぶ.これを全てに曲線について処理し,投票数が閾値を超え た場合に座標から一本の直線を抽出する.一方,HT による他の図形抽出については,図形 をパラメータで表せる限り変換法を応用できる.例えば,円は中心(x, y)と半径 r を表す 3 つ のパラメータに変換することができるので,3 次元のパラメータ空間を用いることになる. 楕円については中心(x, y),縦横比 a,回転θの 4 つのパラメータとなり,膨大な処理が必要 となってしまう.また,2.1 節で述べたように HT の改良法やその他多くの手法が提案されて いるが,多くの提案手法が HT を基本としており,十分な処理速度が得られていない.高速 化のために図形を限定した手法もあるが,抽出対象の図形に制限があるなどの問題点が残さ れている. 2.6.2 比較実験 本項では,提案手法と HT を用いた直線,円,楕円の図形抽出における処理時間と作業メ モリ空間について比較実験を行った.比較対象の実験では抽出対象の画像として図 2.8,図 2.10,図 2.12 を用いた.ただし,作業メモリ空間は,本手法では 1 次元ヒストグラム,HT ではパラメータ空間とした.処理時間は,投票空間へ投票してから抽出終了となるまでにか かった時間とした.比較結果を表 2.1 と表 2.2 に示す.図 2.8(b)の直線抽出の結果,作業メモ リ空間は,本手法では 3.2[KB],HT では 307.2[KB]となった.処理時間は,本手法では 63[ms], HT では 48[ms]であった.円抽出(図 2.10(b))では,作業メモリ空間は,本手法では 1.6[KB], HT では 92.16[MB]となった.処理時間は,本手法では 22[ms],HT では 27[s]程度であった. また,楕円抽出(図 2.12(b))の場合でも,本手法では作業メモリ空間は円抽出と同じく 1.6[KB] となり,処理時間は 3.75[s]程度となった. HT は抽出対象の図形を表すパラメータが 1 つ増える毎に,作業メモリ空間が 1 次元増え る.このため,抽出対象の図形が複雑になるにつれ膨大なメモリ空間と処理時間が必要とな る.一方,本手法では,Polytope 法により探索するパラメータが 1 つずつ増えるのみである ため,HT ほど処理時間は増加しない.本手法は一度で,また作業メモリ空間は 1 次元ヒス トグラムであるので,図形にかかわらず,わずかな使用量で済む. また,本手法では 1 回の探索で 1 つの図形しか抽出できないが,HT は 1 回の探索で複数 の図形を一度に抽出できるメリットもある.しかし,本手法では円以上のパラメータを持つ 図形については,1 回の抽出にかかる処理時間は HT に比べて非常に短いため,処理速度に おいても本手法は優位性がある. 25 その結果,本手法では HT に比べ,図形を表すパラメータが増えた場合に,作業メモリの 使用量,処理時間において,非常に優位性があることが確認できた. 表 2.1 作業メモリ使用量 [KB] 直線 本手法 HT 円 楕円 3.2 1.6 307.2 122,880 1.6 表 2.2 処理時間 [s] 直線 円 本手法 0.063 0.22 HT 0.048 27.33 26 楕円 3.75 2.7 結言 本章では,HT に変わる新しい手法として,1 次元ヒストグラムと多次元関数の最小化アル ゴリズムである Polytope 法を用いた直線・円・楕円の抽出法を提案した.本手法は 1 次元ヒ ストグラムを用いているため,図形を表すパラメータが増加しても投票空間は 1 次元のまま である.そのため,HT やその改良法とは異なり,基本アルゴリズムは直線,円,楕円とも に同一のものであり,評価関数を変更するのみで直線,円,楕円の抽出に適用できる.また HT は,図形を表すパラメータが増加すると,投票のために必要な作業メモリ空間が急激に 増加するが,本手法では作業メモリ空間は画像サイズに依存するため,増加することはなく 非常に小さい.さらに,HT に比べ円,楕円に対して処理時間が非常に短いことがわかった. 27 第3章 1 次元ヒストグラムを用いた任意図形の抽出法 3.1 緒言 画像中から特定の図形を抽出することはロボットビジョンの研究において最も基本的な問 題である.その中でも,HT[10]を拡張した,GHT[19]は,拡大・縮小,回転を受けた任意図 形抽出法として,代表的である.今までに GHT は,さまざまな改良が行われてきた.しか し,それらの手法は,メモリ空間を多く費やし,処理時間が多くかかる.また,改良法によ っては,交差を含む図形への適応は不可能であったり,抽出対象の図形を限定したりする必 要がある(詳細は 3.3 節において述べる).そこで,本論文では,GHT に変わる新しい手法 として,1 次元ヒストグラムを用いた任意画像検出法を提案する.本手法は最小化アルゴリ ズムの一種である Polytope 法を用いる.そして,Polytope 法を用いてヒストグラムの最頻度 の値が最大となるときの図形パラメータを探索する.その結果,従来法に比べ,膨大な処理 時間やメモリ空間を必要とすることはなく,図形が交わっている場合も検出が可能である. さらには,この手法は,縦横比の異なる図形に対しても有効である. 3.2 任意図形の抽出法 ここでは,1 次元ヒストグラムを用いた任意図形の抽出までの流れを述べる.まず,抽出 対象となる任意図形 C を探索するためのテンプレートとなる図形(図 3.1(a))を用意する. この図形を表すパラメータは,中心座標点 p(x0,y0)(図 3.1(b)),縦横比 a(図 3.1(c)),回 転角度 θ(図 3.1(d))と定義する.この定義に基づいて描いた図形を探査図形 c と呼ぶ.その 探査図形 c の中心座標点 p(x0,y0)から抽出対象となる任意図形 C 上の任意の点までの距離を R とする.その点方向の探査図形 c の距離を r とし,距離の比 R/r を d とする.図 3.2(a)に示 すように,任意図形 C を構成する全画素に対して d を計算した後,横軸を d,縦軸をその頻 度 f として 1 次元ヒストグラムを作成する.探査図形 c のパラメータ,中心座標点 p(x0,y0), 縦横比 a,回転角度 θ が抽出対象の任意図形 C を表すパラメータと大きく異なっていれば, 距離の比 d は大きく異なる.そのため,図 3.2(b)に示すように,距離の比 d は 1 次元ヒスト グラムに分散されて投票される.その結果,1 次元ヒストグラムの分布はなだらかになり, 最頻度 fmax は小さくなる.ここで,最頻度 fmax の時の横軸 d の値を dmax とする.一方,図 3.2(c) に示すように,探査図形 c のこれらのパラメータが抽出対象の任意図形 C に近づくと,距離 の比 d は近くなる.そのため,図 3.2(d)に示すように距離の比 d は 1 次元ヒストグラムへや や局所的に投票され,最頻度 fmax は大きくなる.また,図 3.2(e)に示すように,さらに,探査 図形 c のパラメータが抽出対象の任意図形 C のそれらに近づくにつれ,距離の比 d は近くな る.そのため,図 3.2(f)に示すように距離の比 d は 1 次元ヒストグラムへ局所的に投票され, 最頻度 fmax は大きくなっていく.図 3.2(e)に示すように,探査図形 c のパラメータが,抽出対 象の任意図形のそれらと完全に一致する場合,距離の比 d はすべて等しくなる.その結果, 図 3.2(e)に示すように,距離の比 d は,1 次元ヒストグラムに局所的に投票され,最頻度 fmax 28 は最大となる.このとき,抽出対象の任意図形の幅は dmax,高さは dmax×a となる.よって, 最頻度 fmax の値が最大となれば,任意図形が求まる.そこで,最頻度 fmax の値が大きくなる につれて誤差が小さくなる評価関数 E を以下のように定義する. E = 1− f max Cir × VW (3.1) ここで Cir は,ヒストグラムが最頻度 fmax となる時の横軸の値 dmax から求まる任意図形の周 長である. この評価関数 E は,1 次元ヒストグラムの最頻度 fmax が最大となるときに最小となる. Polytope 法を用いて,式(3.1)で示す評価関数 E が最小となる探査図形 c のパラメータ(中心 座標点 p(x0,y0),縦横比 a,回転角度 θ)の探索を行う. 29 (a) 探査図形 p(x0 ,y0) h/w=a a ×1.5 h w (b) 中心点 p(x0, y0) (c) 縦横比a θ=0 θ=π/4 (d) 回転 θ 図 3.1 探査図形を表すパラメータ 30 抽出対象の図形 C y f R fmax r 探査図形 c x 0 (a) d 0 探査直線(初期値) (b) y (a)の 1 次元ヒストグラム f fmax x 0 (c) 探査直線(探索途中) 図 3.2 d 0 (d) (c)の 1 次元ヒストグラム 1 次元ヒストグラムを用いた直線抽出 31 y f fmax x 0 (e) d 0 探査直線(探索途中) (f) y (e)の 1 次元ヒストグラム f fmax x 0 (g) 探査直線(探索結果) 図 3.2 d 0 (h) (g)の 1 次元ヒストグラム 1 次元ヒストグラムを用いた直線抽出 32 3.3 任意図形の抽出実験 3.3.1 実験条件 本手法を用いて,任意図形の抽出を行った.実験で用いた図形抽出対象の画像は,図 3.3 に示したハートの図形を含んだ 2 値画像である.探査図形は図 3.3(b)に示した.また,図 3.3(a) に示したハートの図形と矢印の図形を含んだ検出実験も行った.探査図形は図 3.4(b)に示し た. 画像サイズはいずれも横 640×縦 480 画素である.実験に使用した PC は OS:WindowsXP, CPU:Pentium4-3.2GHz である.提案した任意図形の抽出法では,Polytope 法で探索を行うた めに,探索図形のパラメータの初期値を決める必要がある.本実験において,初期値は中心 座標点 p(x0,y0)を 150,縦横比 a を 1,回転角度 θ を 0 とした.投票時の重み VW は 50 とした. 探索の終了条件は,評価関数 E が 1.0 以下となった場合である (a) 抽出対象の画像 図 3.3 (a) 探査図形 (b) 探査図形 ハートの抽出実験 抽出対象の画像 図 3.4 (b) ハートと矢印を含んだ画像における矢印の抽出実験 33 3.3.2 実験結果 図 3.3(a)の抽出における探索経過の状態を図 3.5(a)~(c)に,探索結果を図 3.5(d)に示す.探 索前と探索終了時の探査図形のパラメータを表 3.1 に示した.図 3.3(a)に示すハート図形の抽 出実験では,図 3.5 に示すように,Polytope 法での探索の回数が増えるにつれ探査図形が抽 出対象の図形パラメータに一致してきているのが確認できる.その結果,正しく抽出できて いることが分かる.また,表 3.1 からも分かるように,探索の結果,探査図形の初期のパラ メータが,抽出対象の図形を表す正しいパラメータにほぼ一致している. 次に複数の図形を含む画像からの抽出実験を行った.図 3.4 に示すようにハートと矢印の 抽出を探査図形とする.図 3.6(c)に示す結果より,ハートの図形が正しく抽出できているこ とが確認できる.一方,図 3.6(d)に示す矢印図形の抽出では,正しく抽出できていない.こ のように,画像中にノイズがあったり,複数の図形が含まれたりする場合,正しく抽出がで きない場合がある.その原因として,3.3.1 項で述べたように,Polytope 法で関数の最小化を 行う場合は,”初期値”を適切な値に設定しておく必要があるためである.これらの値が適切 でない場合,最適値を見つけることができない場合がある.そのため,図形の探索では,探 査図形のパラメータの初期が予め抽出対象となる図形を表すパラメータの値に近い方が望ま しい.この問題については第 4 章で検討を行う. 任意図形の探査にかかった処理時間と使用した作業メモリ空間を表 3.2 に示す.処理時間 は図 3.5 が 0.9[s],図 3.6(c)が 0.8[s],図 3.6(d)が 0.9[s]となり,作業メモリ空間は,どれも 3.2[KB] であった(1 次元ヒストグラムの横軸 d(=800Byte)×縦軸 f(=4Byte)). 34 探査図形 対象図形 (a) 0 回目の評価(初期パラメータ) (c) (b) 40 回目の評価 図 3.5 (d) 5 回目の評価 188 回目の評価(探索結果) Polytope 法を用いた評価回数と探索経過の関係と探索結果 表 3.1 実験結果 x y a θ 初期値 150 150 1.0 0 探索結果 400.0 350.0 1.43 81.0 正解値 400 350 1.5 90 35 探査図形 対象図形 (a) (b) 探査図形の初期値(ハート) (c) 探索結果 図 3.6 表 3.2 探査図形の初期値(矢印) (d) 探索結果 矢印の実験の探索結果 任意図形抽出の処理時間とメモリ空間 図 3.5 図 3.6(a) 図 3.6(b) 処理時間 [s] 0.9 0.8 0.9 メモリ空間 [kB] 3.2 3.2 3.2 36 3.3.3 他の手法との比較 本項では任意図形の抽出法について本手法と他の手法と比較し検討を行う.まず,本手法 と比較すべき抽出法としては,拡大縮小,縦横比,回転を受けた任意図形抽出ができる手法 である.例えば,GHT を拡張した[25]がある.これは,エッジ点列に近似的に円弧当てはめ を行っているため,3.3.1 項の図 3.4(b)の“矢印”の抽出など直線で構成される図形には適応が 難しい.縦横比の変更が可能な GHT 以外の手法としては,フーリエ記述子を用いたもの[26], GA を用いたもの[27],幾何学ハッシング[28]を用いたものがある.[26]では,抽出対象の図 形の線が連続でなければならず,[27]と[28]は処理時間が膨大な時間がかかる. 縦横比の異ならない図形を抽出対象にする任意図形抽出法としては,FGHT(First GHT)[23] がある.そこで,論文[23]にある実験結果(図 3.7)と,その画像相当となる提案手法を用い た実験結果(図 3.8)について比較実験をおこなう.提案手法では縦横比の異なる図 3.8(c)に示 した図形も用いた.どちらの画像も 256×256 画素で構成される. 使用した CPU は,論文[23]では,400MHz の Pentium II,図 3.8 の抽出では,1.2GHz の AMD Duron を使用している. FGHT と提案手法の比較結果を表 3.3 に示す.処理時間は FGHT では,0.16[s],提案手法 図形(A)では 0.21[s]であった.使用した CPU の動作クロックを勘案すると,FGHT は 4 倍ほ ど処理時間が早い.しかし,FGHT は相似変換不変な図形抽出法であり,縦横比の異なる図 形に対しては適応できない.一方,提案手法では縦横比の異なる図形(B)であっても 0.29 秒 しかかからない. 所要メモリ空間は,FGHT では 3[MB],提案手法では図形(A)と図形(B)のどちらも 1.4[kB] である.これは,提案手法は FGHT の約 1/2000 である.このように,本手法では 1 次元ヒス トグラムを用いているため,抽出対象の図形を表すパラメータが増えても,所要メモリ空間 の増加はない. 37 (a) テンプレート図形 (b) 抽出対象の画像 図 3.7 論文[23]のテストデータ (a)テンプレート図形 (b)抽出対象の画像(A) (c)抽出対象の画像(B) 図 3.8 提案手法のテストデータ 表 3.3 FGHT と提案手法との比較 提案手法(A) 提案手法(B) 0.16 0.12 0.12 3 0.0016 0.0016 FGHT 処理時間 [s] メモリ空間 [MB] 38 3.4 結言 本章では,1次元ヒストグラムと多次元の最小化アルゴリズムを用いた任意図形の抽出法に ついて提案した.本手法は,簡易なアルゴリズムであるにもかかわらず,従来の拡大縮小, 縦横比,回転を受けた任意図形の抽出法に比べ,使用する作業メモリ空間が小さく,処理速 度も速い.また,縦横比の変形を受けない抽出法である任意図形の高速な抽出法であるFGHT と比較しても,作業メモリ空間は非常に小さいことが確認できた.また,本手法の基本的な アルゴリズムは2章で述べた,直線,円,楕円の抽出法とほぼ同じである.そのため,自律型 ロボットにこの手法を載せた場合も,計算機の資源を節約しながら,それぞれの図形に対応 できると考えられる. 39 第4章 複雑な画像における図形抽出法 4.1 緒言 本章では,本提案手法を用いて,複雑な画像における図形抽出法の検討を行う.3.2 節で図 3.2 の任意図形の抽出を行ったように,画像中にノイズや他の図形を含む場合,正しく抽出が できない場合がある.その原因として,本手法で使用している多次元の最小化アルゴリズム である Polytope 法が考えられる.その手法では,単峰性の関数を最小化するため,多峰性に なる場合,局所解に落ちてしまう可能性がある.そのため,Polytope 法に与える,探査図形 の初期値を適切な値に設定しておく必要がある.これらの値が適切でない場合,最適値を見 つけることができない場合がある.つまり,本提案手法における探査図形のパラメータの初 期値が,予め抽出対象となる図形を表すパラメータの値に近い方が望ましい. 4.2 探査図形と 1 次元ヒストグラムの関係 3.3 節の実験結果から“初期値”によっては,図形抽出が正しく行われない場合があること が分かった.提案手法では,まず,抽出対象となる任意図形 C を探索するためのテンプレー トとなる探査図形 c を用意する.この図形を表すパラメータは,中心座標点 p(x0,y0),縦横 比 a0,回転角度 θ である.その探査図形 c の中心座標点 p(x0,y0)から抽出対象となる任意図 形 C 上の任意の点までの距離を R とする.その点の方向の探査図形 c の距離を r とし,距離 の比 R/r を d とする.任意図形 C を構成する全画素に対して d を計算した後,横軸を d,縦 軸をその頻度 f として 1 次元ヒストグラムを作成する.このとき,探査図形 c のパラメータ である中心座標点 p(x0,y0),縦横比 a,回転角度 θ が抽出対象の任意図形 C を表すパラメー タと一致しているほど,距離の比 d が等しくなる.そのため,距離の比 d は,1 次元ヒスト グラムへ局所的に投票され,最頻度 fmax は大きくなる.つまり,最頻度 fmax が最大となれば 任意図形 C の中心座標,回転角度,縦横比が推定できる.この性質を利用して本手法では任 意画像の検出を行っている.そこで,“初期値”と最頻度 fmax の関係について検討する.最頻 度 fmax が最大となるときは,距離の比 d が一致したときである.距離の比 d は,探査図形の 中心座標点 p(x0,y0)と任意図形 C のそれが大きく異なっていれば,回転 θ や縦横比 a が任意 図形のそれと一致していても,最頻度 fmax は大きくならない.一方,探査図形 c の回転 θ や 縦横比 a が任意図形 C のそれと異なっていても,最頻度 fmax はある程度までは大きくなる. そのため,Polytope 法を用いて探査図形のパラメータを変化させても,“初期値”の中心座 標点 p(x0,y0)のパラメータによっては,任意図形 C,最頻度 fmax が大きくならないことがあ る.その結果,探査図形 c のパラメータが極小値に陥ってしまい,所望の値が得られない場 合がある.つまり,探査図形の“初期値”である中心座標点 p(x0,y0)は,回転 θ や縦横比 a に 比べ,最頻度 fmax に大きく影響する.そのため,本手法の画像探索は,中心座標点 p(x0,y0) の初期値を適切に設定することで正しく図形探索が行われる. 40 4.3 中心座標パラメータの推定 4.2 節で述べたように,Polytope 法を用いて探索を行う場合,探査図形のパラメータの中心 座標点 p(x0,y0)の初期値によっては正しく抽出が行われない場合がある.そこで,抽出対象 の画像から任意図形の中心座標点となりうる候補点を求めることにした.この候補点を探査 図形の中心座標点 p(x0,y0)の初期値として探索を行うことで,初期値に依存することなく確 実に探索が行うことができる.その手順としては,抽出対象となる図形の中心座標点を,そ の図形の閉曲線の重心を求めることで見つける.以下の手順によって図 4.1(a)に示す画像に 対し処理を行った. (1) 拡大操作:2 値化等の処理によって閉曲線の画像が途切れてしまった領域を埋める.(図 4.1(b)) (2) 小領域の抽出:基準値 t1 以上の大きさの領域である背景などの大きなノイズを除去する. (図 4.1(c)) (3) 大領域の抽出:基準値 t2 以下の大きさの領域である小さなノイズを除去する.(図 4.1(d)) (4) 重心抽出:領域の重心を求める.(図 4.1(e)) 以上の処理を行うことで抽出対象の図形の候補点が見つかる.この候補点を探査図形の初期 値として探索を行っていく. 41 (a) ノイズによって途切れた線を含む画像 (b) 拡大操作 (c) 小領域抽出 (d) 大領域抽出 (e) 重心点抽出 図 4.1 重心点抽出の手続き 42 4.4 改良した提案手法を用いた実験 本節では,4.3 節で使用した重心点を用いて,複数の図形が重なり合った図形やノイズが含 まれている複雑な画像に対して,本手法の有効性を確認するための実験を行った. 本実験に用いた抽出対象は 3.3 節で使用したハートの図形と矢印の図形を含んだ画像であ る(図 3.4(a)).今回の抽出実験では,ハートの図形と矢印図形をそれぞれ抽出するために,探 査図形は,図 3.3(b)と図 3.4(b)を用いた.4.3 節で述べた処理を用いて求めた重心座標の結果 を,図 4.2(a)で示す.それらの点を探査図形の中心座標の初期パラメータ p(x0,y0)とする. 図 4.2(a)からわかるように,抽出対象の図形の中心点の近傍に重心点が置かれていることが わかる. この場合,2 点の重心点が検出されているため,それぞれ 2 回の提案手法を用いて探索を 行う.その探索の結果,評価関数 E の最小値を選び,そのときの探査図形パラメータを正し いものとし,図形抽出が完了したとみなす.その他の探索条件は 4.3 節と同じである. 抽出結果を図 4.2(b)と図 4.2(c)に示す.矢印の図形とハートの図形が正しく抽出できている ことが確認できる.重心座標の探索に要した時間は,0.2[s],図形探索に要した処理時間は, 矢印の図形で 3.3[s],ハートの図形で 3.1[s]であった.3.3 節の矢印とハートの抽出実験(図 3.4) と比べ,どちらも処理時間が約 2 倍になっているのは,2 つの重心点それぞれにおいて探索 を行ったためである. 図 4.3 と図 4.4 に他の図形検出実験を示す.これらの抽出対象の画像はノイズを非常に多く 含んでいる.図 4.3(b)と図 4.4(b)に探査図形,図 4.3(c)と図 4.4(c)に重心点に重心点を示す. 初期値の中心座標点 p(x0,y0)となるすべて候補点は,どちらも 3 点となった.その後の抽出 手順は図 4.1 の抽出実験の手順と同様である.抽出結果を図 4.3(d)と図 4.4(d)に示す.どちら の図形も正しく抽出できていることが確認できる.中心座標候補の探索に要した時間は, 0.2[s],図形探索に要した処理時間は,図 4.3(a)の図形で 4.3[s],図 4.4(c)の図形で 4.7[s],使 用した作業メモリ空間は,どちらも 3.2[KB]であった(表 4.2). 図 4.5 に他の開曲線の図形検出実験を示す.これらの抽出対象の画像も,ノイズを非常に 多く含んでいる.図 4.5(b)と図 4.5(c)に探査図形,図 4.5(d)に重心点を示す.初期値の中心座 標点 p(x0,y0)となるすべて候補点は,どちらも 3 点となった.その後の抽出手順は図 4.3 の 抽出実験の手順と同様である.中心座標候補の探索に要した時間は,0.2[s],図形探索に要し た処理時間は,図 4.5(b)の図形で 4.6[s],図 4.5(c)の図形で 5.5[s],使用した作業メモリ空間は, どちらも 3.2[KB]であった(表 4.2). これらの結果から,本提案手法では,図形の重なりやノイズに対しても頑健に抽出できる ことが確認できた.また,開曲線に対しても任意図形抽出の重心点を求めることが可能であ ることを示したが,詳細な条件については 4.5 節に説明する. 43 (a) ハート図形と矢印図形のの重心点 (b) 矢印図形の抽出 (c) ハート図形の抽出 図 4.2. 改良法を用いた抽出実験 表 4.1 改良法を用いた抽出実験の処理時間とメモリ空間 矢印図形(b) ハート図形(c) 処理時間 [s] 1.4 1.8 メモリ空間 [KB] 3.2 3.2 44 (a) 抽出対象の画像 (b) 探査図形 (c) 重心点 (d) 抽出結果 図 4.3 ノイズを多く含んだ画像の実験 (A) 45 (a) 抽出対象の画像 (b) 探査図形 (c) 重心点 (d) 抽出結果 図 4.4 ノイズを多く含んだ画像の実験 (B) 46 (a) 抽出対象の画像 (b) 探査図形 (A) (c) 探査図形 (B) (d) 重心点 (e) 抽出結果 (A) (f) 抽出結果 (B) 図 4.5 ノイズを多く含んだ画像における開曲線の抽出実験 47 表 4.2 改良法を用いたノイズを多く含んだ抽出実験の処理時間とメモリ空間 図 4.3 図 4.4 図 4.5(A) 図 4.5(B) 処理時間 [s] 4.3 4.7 4.6 5.5 メモリ空間 [KB] 3.2 3.2 3.2 3.2 48 4.5 重心点抽出の適応が可能な開曲線 図 4.5 に示すように,本提案手法は開曲線の抽出にも適応できる.しかし,抽出できる開 曲線の図形は制限がある.開曲線では,4.3 節で示した重心点を求める手続きを行う場合,開 いている曲線を閉じるまで拡張の操作を行う必要がある.そのとき,ホールが存在しなけれ ば重心点を抽出することができない.例えば,図 4.6(a)に示すように,曲線の端点間の距離 l の 1/2 だけ拡張したときにホールが存在すれば,重心点抽出の適応が可能な開曲線である. 一方,図 4.6(b)に示すように,距離 l の 1/2 だけ拡張した場合,ホールが消失してしまえば, 正しい重心点を抽出することはできない. 任意図形 ホール l/2 l/2 l (a) 可能な図形 (b) 不可能な図形 図 4.6 重心点の抽出が可能な図形の状態 49 4.6 図形の重なりを考慮した図形抽出 本節では,抽出対象の図形に重なりがあった場合の提案手法の適応について考える.自律 型ロボットが空間から物体抽出を行う場合,障害物により対象の物体が欠けたりする場合が ある.このとき,図形情報の一部が失われるため,提案手法を用いて正しく抽出ができない 場合がある.そこで,図形の重なりの影響が提案手法にどのような影響を与えるか検討を行 う.また,画像中に抽出対象の図形が複数個含まれている場合,評価関数 E の値に閾値 Eth を決める必要がある.そのため,正しい探査の結果が正しい抽出対象の図形であるかを判定 するための評価関数の閾値 Eth の設定法を検討する. ここでは,抽出対象の図形に他の図形との重なりがない場合を考える.探索が終了した後, 正しい抽出結果が得られ場合はの 1 次元ヒストグラムの最頻度 fmax は以下の式で表される. fmax = Nt × Vg (4.1) ここで,Nt は抽出対象の図形を構成する画素数,Vg は投票時の重みである.この式から,図 形の構成画素 Nt が完全である場合に最も大きな fmax が得られ,Nt が失われる毎に fmax が小さ くなることがわかる.このように,他の図形による重なりのない図 4.7(a-i)に示すような探索 結果では,図 4.7(b-i)に示すように fmax は最も大きな値となる.その結果,図 4.7(c-i)に示すよ うに 3.2 節の式 3.1 を用いて評価関数 E の値を求めると非常に小さくなる.そこで,画像中 に,抽出対象の図形と似た図 4.7(a-iv)のような図形が含まれている場合,Eth は図 4.7(c-i)と図 4.7(c-iv)に示す E の範囲で設定することができる.このように,閾値 Eth の設定をより小さい 値にできれば,抽出対象が似ている図形と区別できる.一方,図 4.7(a-ii)に示すように,抽出 対象の図形に小さな重なりのある探索結果では,図 4.7(b-ii)に示すように fmax は値となるため, 最大値よりやや小さくなり,図 4.7(c-ii)に示すような E となる.そのため,Eth は図 4.7(c-ii) と図 4.7(c-iv)に示す E の範囲で設定することができる.また,図 4.7(a-iii)に示すように,他 の図形による重なりが大きな場合,図 4.7(b-iii)に示すように fmax は小さくなり,図 4.7(c-iii) に示すような E となる.このように,E が誤った探索結果(図 4.7(a-iv))より大きくなれば,提 案手法では検出することができない. 重なりのある実験結果の例を図 4.8 に示す.探査図形は 3.3.1 項の実験で用いた矢印とハー トの図形を用いた.その結果,左の重なりのあるハートの図形の E が 0.2,矢印の図形の E が 0.7,右の重なりのないハートの図形の E が 0.0 となった.このような画像の場合,ハート の図形だけを正しく抽出するためには,閾値を Eth は 0.2~0.7 の範囲で設定する必要がある. 50 抽出対象の図形 探査図形 (i) 重なりのない探索結果 (ii) 小さな重なりのある探索結果 (iii) 大きな重なりのある探索結果 (iv) 誤った探索結果 (a) 探索結果 f fmax (i) (iii) (ii) (iv) (b) 1 次元ヒストグラム E Eth の設定が可能な範囲 (i) (iii) (ii) (iv) (c) 評価関数 図 4.7 重なりのある探索における最頻度と評価関数の関係 51 E = 0.2 E = 0.0 E = 0.7 (b) 探索結果 (a) 抽出対象の画像 図 4.8 重なりのある図形抽出実験 52 4.7 結言 本章では,従来の任意図形抽出法に変わる新しい手法として,1 次元ヒストグラムと多次 元関数の最小化アルゴリズムである Polytope 法を用いた複雑な任意図形の抽出法を提案した. 本手法は 1 次元ヒストグラムを用いているため,図形を表すパラメータが増加しても投票空 間は 1 次元のままである.また,従来の提案手法では抽出が難しかった,ノイズや複雑な画 像においても,図形の重心点を求め,探査図形の初期パラメータの中心点とすることで対応 できることを確認した.さらに,開曲線における重心点の抽出法についても検討を行った. その結果,従来法に比べ,膨大な処理時間を必要とすることなく,作業メモリ空間の使用量 も非常に少ないことがわかった. 53 第5章 結論 本論文では,自律型ロボット等のカメラを用いた空間把握や物体認識に必要な,図形抽出 手法についての研究成果を述べた.提案手法は,メモリ消費量が少なく処理速度が速いにも 関わらず,アルゴリズムが非常にシンプルである.さらに,改良法を用いることで画像にノ イズが多く含まれる場合も頑健に図形抽出ができることを確認した.以下に各章毎の内容と 研究成果について述べる. 第 2 章では,1 次元ヒストグラムと Polytope 法を用いた直線・円・楕円の抽出法について 述べた.提案手法は,図形データから 1 次元ヒストグラムを作成する.このヒストグラムは, 図形を表すパラメータを変化させると,ヒストグラムの分布が変化する性質と,ヒストグラ ムの最頻度の値が最大となるとき,正しい図形パラメータが得られる性質を持っている.こ のヒストグラムの最頻度の値が最大となるように Polytope 法を用いて図形パラメータを探索 する.Polytope 法とは,多次元関数の最小化アルゴリズムの一種であり,Newton 法のように 関数の導関数を用いずに最小値を求めることができる.そのため,ヒストグラムが最大とな るときに評価関数が最小になるような関数を決めることができれば,ヒストグラムの最大値 となるパラメータ探索に利用することが可能である.このように,本手法は 1 次元ヒストグ ラムを用いているため,図形を表すパラメータが増加しても投票空間は 1 次元のままである. そのため,HT やその改良法とは異なり,基本アルゴリズムは直線,円,楕円ともに同一の ものであり,評価関数を変更するのみで直線,円,楕円の抽出に適用できる.また,HT が 図形を表すパラメータが増加すると,投票のための作業メモリ空間が膨大な増加をするが, 本手法では,作業メモリ空間は画像サイズに依存するため,増加することはなく非常に小さ い.さらに,HT に比べ円,楕円に対して処理時間が非常に短いことがわかった. 第3章では,1次元ヒストグラムとPolytope法を用いた任意図形の抽出法について述べた.基 本的なアルゴリズムは第2章と同じである.この手法は,ロボットビジョンの研究において最 も基本的な問題である画像中から特定の図形抽出に応用される.その中でも,HTを拡張した GHTは,拡大・縮小,回転を受けた任意図形抽出法として,代表的である.今までに,GHT は,さまざまな改良が行われてきた.しかし,それらの手法は,メモリ空間を多く費やし, 処理時間が多くかかる.また,その改良法では,交差を含む図形への適応は不可能である. また,その他の任意図形手法とも比較し,検討を行った.その結果,本手法は,簡易なアル ゴリズムであるにもかかわらず,従来の拡大縮小,縦横比,回転を受けた任意図形の抽出法 に比べ,使用する作業メモリ空間が小さく,処理速度も速い.また,縦横比の変形を受けな い抽出法である任意図形の高速な抽出法であるFGHTと比較しても,作業メモリ空間は非常に 小さいことが確認できた.また,本手法の基本的なアルゴリズムは第2章で述べた,直線,円, 楕円の抽出法とほぼ同じである.そのため,自律型ロボットにこの手法を載せた場合も,計 算機の資源を節約しながら,それぞれの図形に対応できると考えられる. 第 4 章では,実際に本提案手法を使用する際に問題となってくる,ノイズを多く含む画像 に対して本手法が有効であるかを確認した.前章での実験では,複雑な画像に対して本手法 54 をそのまま適応すると誤って抽出してしまう場合があった.その原因として,本手法で使用 している多次元の最小化アルゴリズムである Polytope 法が考えられる.その手法は,単峰性 の関数を最小化するため,多峰性になる場合には局所解に落ちてしまう可能性がある.その ため,Polytope 法に与える,探査図形の初期値を適切な値に設定しておく必要がある.これ らの値が適切でない場合,最適値を見つけることができない場合がある.つまり,本提案手 法における探査図形のパラメータの初期が,予め抽出対象となる図形を表すパラメータの値 に近い方が望ましい.そこで,図形を表すパラメータと 1 次元ヒストグラムの関係を詳しく 調べた.その結果,ヒストグラムに最も大きく影響を与えるパラメータとして,探査図形の 中心点であることを確認した.そのため,このパラメータを図形の重心点として抽出する画 像処理を提案した.その重心点を探査図形の中心点の初期パラメータとし,複雑な画像を用 いて図形抽出実験を行った.その結果,従来の提案手法では抽出が難しかったノイズや複雑 な画像においても,図形の重心点を求め,探査図形の初期パラメータの中心点とすることで 対応できることを確認した.さらに,開曲線における重心点の抽出法についても検討を行っ た.その結果,従来法に比べ,膨大な処理時間を必要とすることなく,作業メモリ空間の使 用量も非常に少ないことがわかった. 提案した 1 次元ヒストグラムを用いた図形抽出法は,現在までに提案されてきた多くの HT や GHT 等を元に改良された手法とは異なり,基本的なアルゴリズムを確立したのみである. それにも関わらず,処理速度が早くメモリ消費量も非常に小さくノイズに頑健であり,同一 の基本アルゴリズムで,多数の図形抽出に対応できている.そのため,これからの応用や発 展にも期待できる.今後は,レーザレンジファインダ等から得られる 3 次元の空間情報から, 目的の対象物体を認識するために,3 次元の図形抽出にも対応していく予定である. 55 参考文献 [1] 酒井龍雄,村井亮介,上松弘幸,木下愼太郎,北野斉,“物流システムとロボット 自 律移動ロボットによる自動搬送システム”,パナソニック電工技法,Vol.57,No.3, pp.16-22,2009. [2] 酒井龍雄,中嶋久人,西村大輔,上松弘幸,北野幸彦,“病院内搬送用自律移動ロボッ トシステム”,松下電工技法,Vol.53,No.2,pp.62-67,2005. [3] 神田真司,沢崎直之,麻田務,“3次元視覚システム搭載の富士通サービスロボット” 雑誌 FUJITSU,Vol.56,No.4,pp.392-399,2009. [4] Hossain Md. Altab,Kurinia Rahmadi,Nakamura Akio and Kuno Yoshinori, “Interactive Object Recognition System for a Helper Robot Using Photometric Invariance”,IEICE Transactions on Information and Systems,Vol.E88-D No.11, pp.2500-2508,2005. [5] Tomohiro Shibata,Yoshio Matsumoto,Taichi Kuwahara,Masayuki Inaba and Hirochika Inoue,“Development and Integration of Generic Components for a Teachable Vision-Based Mobile Robot”,IEEE/ASME Transaction on mechatronics, Vol.1,No.3,pp.230-236,1996. [6] 古賀敏之,鈴木薫,山口修, “ホームロボットでの顔認識技術”,東芝レビュー,Vol.59, No.9,pp.33-36,2004. [7] 福井和広,山口修, “ロボット向け顔認識技術”東芝レビュー,Vol.56,No.9,pp.20-23, 2001. [8] 吉田龍也,黒田浩司,西垣戸貴臣,“自動車の安全走行支援システム”,日立評論, Vol.86,No.5,pp.39-42,2004. [9] 佐治禎基,上野敦志,武田英明,“移動のある物体を認識・管理するオフィスロボット の構築”,電子情報通信学会技術研究報告,Vol.99,No.717,pp.1-8,2000. [10] Hough,P. V. C,“Methods and Means for Recognizing Complex Patterns,”United States Patent 3069654,1962. [11] Duda,R. O. and P. E. Hart, “Use of the Hough Transformation to Detect Lines and Curves in Pictures”,Comm.ACM,Vol.15,No.1,pp.11-15,1972. [12] Davies,E. R.,“Image space transforms for detecting straight edges in industrial images”,Pattern Recognition Letters archive,Vol.4,No.3,185-192,1986. [13] Kimme, C.,Ballard, D.H. and Skansky, J.,“Finding circles by an array of accumulators”,Comm.ACM,Vol.18,No.2,pp.120-122,1975. [14] Tsuji, S. and Matsumoto, F. , “ Detection of ellipses by a modified Hough transform”,IEEE Trans. on Computers,Vol.27,No.8,pp.777-781,1978. [15] F. O'Gorman and M.B. Clowes,“Finding Picture Edges Through Collinearity of Feature Points”,IEEE Trans. on Computers,Vol.25,No.4,pp.449-456,1976. [16] 沼田宗敏,輿水大和,“Gradient 型超高速 Hough 変換アルゴリズム”,情報処理学会 研究会資料,CV51-2,pp.1-8,1987. [17] O'Rourke, J., “Dynamically quantized spaces for focusing the Hough transform”, Proc. of 7th Int’l Joint Conf. on Artificial Intelligence,pp.737-739,1981. [18] 安居院猛,崔亨振,中嶋正之,“ピラミッド階層を利用した高速 Hough 変換について: 車両番号領域抽出への応用”,テレビジョン学会技術報告,Vol.10,No.27,pp.49-56, 1986. [19] D.H. Ballard,“Generalizing the Hough transform to detect arbitrary shapes”, Pattern Recognition,Vol.13,No.2,pp.111-122,1981. [20] Pina-Fu Fung , Wing-Sze Lee and King, I. “ Randomized generalized Hough transform for 2-D gray scale object detection”,Pattern Recognition,Vol.2, pp.511-515,1996. [21] Masashi Morimoto and Yasuhito Suenaga , “ Variable Generalized Hough Transform Based on Error Analysis of Curve Gradient”,Systems and Computers in Japan,Vol.31,pp.19-28,2000. [22] Clark F. Olson,“Improving the generalized Hough transform through imperfect grouping”,Image and Vision Computing,Vol.16,No.9-10,pp.627-634,1998. [23] 木村彰男,渡辺孝志,“アフィン変換に不変な任意図形検出法として拡張された一般化 ハフ変換” 電子情報通信学会論文誌,Vol.J84-D-II,No.5,pp.789-798,2001. [24] 木村彰男,渡辺孝志,“図形検出能力を向上させた高速一般化ハフ変換” 電子情報通 信学会論文誌,Vol.J83-D-II,No.5,pp.1256-1265,2000. [25] 木村彰男,渡辺孝志,“高速一般化ハフ変換 : 相似変換不変な任意図形検出法” 電子 情報通信学会論文誌,Vol.J81-D-II,No.4,pp.726-734,1998. [26] 宮武孝文,松山隆司,長尾真,“フーリエ記述子を用いたアフィン変換に不変な曲線の 認識について”,情報処理学会論文誌,Vol.24,No.1,pp.64-71,1983. [27] 長尾智晴,安居院猛,長橋宏, “遺伝的手法を用いた 2 値図形のパターンマッチング”, 情報処理学会論文誌,Vol.24,No.1,pp.64-71,1983. [28] F. C. D. Tsai, “Geometric hashing with line features”,Pattern Recognit.,Vol.27, No.3,pp.377-389,1994. [29] 奥村晴彦,“C 言語によるアルゴリズム事典”,技術評論社,p.262,2006. [30] W. H. Press,B. P. Flannery,S. A. Teulolsky and W. T. Vetterling,“Numerical Recipes-The Art of Scientific Computing”,Cambridge University Press,pp.289-293, 1987. 謝辞 本論文の執筆にあたり,多大なご指導とご鞭撻をいただいた九州工業大学 芹川 聖一 教授 に心より感謝の意を表します.また,本論文に対して貴重なご意見を賜りました,九州工業 大学 二矢田 勝行 教授,近藤 浩 教授,金 亨燮 准教授に感謝申し上げます.また,九州工 業大学 張 力峰 先生,楊 世淵 先生,北九州高専の宮内 真人 先生,西日本工業大学 水戸 三 千秋 先生には,研究活動における多くの場面で,有益なご助言を賜り,厚く御礼申し上げま す.また,芹川研究室のメンバーとは,切磋琢磨することでお互いを助け合い,すばらしい 時間を共にすることができました.特に,同学の北園 優希君との議論は非常に有益で,本研 究を行う上でよい刺激となりました. 最後に,経済面および精神面で私を支えてくれた父と母,妹,そして多くのすばらしい友 人に感謝いたします.
© Copyright 2026 Paperzz