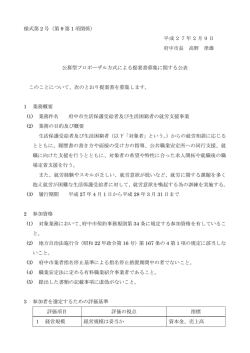
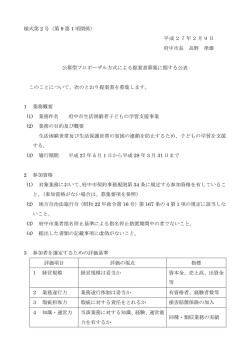
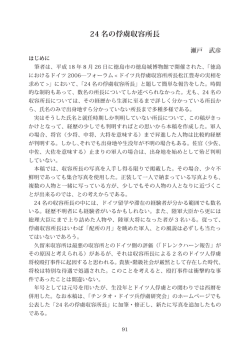
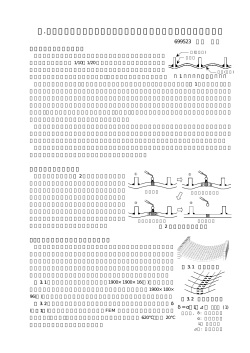
輪講 西村 孝 年 月 日 はじめに 近年,物体認識や,特徴点追跡,マッチングにおいて, が良く用いられている. は,画像の回転やスケール変化等に不変であるため,それら要素に適している.しかし,処理 コストが高いことが問題となっており, を用いるアプリケーションではリアルタイム処 理が難しい課題となっている.今回調査する は,メモリー使用量削減と高速化を同時に行っており,携帯電話で実装が可能となっ ている. 携帯電話上のリアルタイムの特徴トラッキングを行うため つの技術を用いる.それは, と である. は画像変化に強いが,計算コストが高い, は,分類は速いが,大 量のメモリを必要とする.この両方のアプローチは携帯電話に適さない.そのため携帯電話上 に実装するための手法を示す. 対応点マッチング スケールに不変なトラッキング 記述子は,回転やスケール変化に不変ではないため, 検出時に回転やスケール のパラメータを求めている. は,異なるスケールでガウスのフィルタを 適応し, の差を計算している.これは,! オペレーターの近似である." は,スケールスペース極値を探索することにより決定する.# $ 探索とガウシアンフィル タは,計算コストが非常に高い.回転の不変性は, のまわりの勾配オリエンテーショ ンおよび強度を計算しオリエンテーションのヒストグラムを作成して,ヒストグラム中のピー クを探索することで得られる. !%& ' ( )*+ **, 図 - 領域分割 特徴量は,オリエンテーション算出と同じように再び勾配に基づく.領域をサブ領域に分割 .図 を参照/ し,重みは,パッチ .図 の中の大規模な円によって示された/ の中心からの距離に よって勾配に加えられる.特徴量の長さは,サブ領域 .通常 )$) あるいは 0$0/ の上でオリエン テーション .通常 0 あるいは 1/ の量子化に依存する. は 1 つのオリエンテーションおよ び 0$0 サブ領域を使用している.それは精度が一番良いためである. 対応点マッチングを携帯電話で実現 下記では,携帯電話にふさわしくした と のアプローチについて示す. 図 - 処理手順 !%& ' ( )*+ **, ) の修正 下記では,携帯電話上のリアルタイム実行を実現するために, アルゴリズムを修正した かを示す.モデル画像は,予め特徴量を求めておく必要がある. 特徴点 アルゴリズムは,特徴点を検知するだけでなくスケールを評価する.スケールスペース探 索を行なうために の違い . / を使用している.しかし,携帯電話上のリアルタイ ム実行に向かないため, を,% 2 に置き換える.このままでは,スケー ル変化の不変性がなくなるため,すべてのスケールから特徴量を算出し記録している.従って, 速度とメモリを交換し, 34 に負荷を与えるスケールスペース探索を回避することができる. 調節することができる % 2 のしきい値を変えることによって, の数を 変える事ができる. つのモデル当たり 5* 個程度の特徴が精度と処理速度の間のよいバラン スであると判明している. 図 )- コーナ検出 % 2 は,しきい値 と候補ピクセル の強度より明るい円上の接触するピク セルが存在するならコーナ点として検出する .図 )/.円の大きさは定義されている.高速化の ため図 ) 中の ,5,, および ).0 つの方位/ で 0 つのピクセルだけを検査する. がそのとき 角である場合,少なくともこれらの ) つはすべて 6 より明るいか,あるいは より暗 く,どちらでもない場合, はコーナ点ではない.以上のように,候補ピクセル と円上の 0 つのピクセルの 5 ピクセルを検査することでコーナ点を検出している. トラッキング 特徴点は,次フレームにすべてのアウトライアテストに合格した特徴点を用いるので,追跡精 度は改善される.良い特徴点は,すべてのテストに合格して,前のフレームで最終的に姿勢評 価に貢献する. 悪い特徴点は,マッチングすることができなかったか,アウトライアとして検 出されなかった特徴点である. この情報を次フレームに送ることで,不要な特徴点を削除する ことで処理コストを削減できる.特徴点を追跡するために, )$) のガウスを使用して平滑化し た 1$1 ピクセルのサイズのパッチを抽出する.平滑化することで,特徴をアフィン変換および !%& ' ( )*+ **, 0 少々の位置ズレが生じた特徴座標に対してもより頑健にする.パッチの類似度は % により 評価される.計算速度を削減するために,追跡は半径 5 ピクセルの範囲である. 記述子 記述子は 1 次元(0$0 領域から 1 つの勾配方向)である.計算コストとメモリの削減 のため,)$) 領域から 0 つの勾配方向 .)7 次元/ を使用する.キーポイント検出でスケールを 図 0- の特徴抽出 探索していないため,特徴量を記述する範囲は常に 5 ピクセル .5 ピクセルごとの ) つの領域 .図 // である.)$) のガウスにより平滑化を行う .図 0 を参照/.オリエンテーションは,通常 の と同様に,最初にパッチの勾配からオリエンテーションを評価する.作成されるヒス トグラムからピークを探索し, ) つを超えるピークが見つかる場合,特徴点は削除する.算出 されたオリエンテーションの方向にサブピクセル精度を使用して回転する.回転したパッチか ら特徴量を記述する. マッチング 新しいイメージ .前フレームから追跡されているのを除いて/ に検知されたすべての特徴点を記 述して記憶しておく.各フレームで 5*〜** 程度の特徴点が算出され,記憶された 5*** 程度 の特徴点と比較する必要がある.特徴が )7 次元であるため, 1** 万個の特徴量を比較するこ とになる.それはメモリと計算上の制約によりリアルタイムが困難となる.そこで,マッチン !%& ' ( )*+ **, 5 グに を利用する.モデル画像から作成した )7 次元の空間に特徴点を入力し,近いク ラスの特徴点のみを比較することで,探索範囲を削減している. アウトライア アウトライア判定にはオリエンテーションを使用する.追跡点は,同様なオリエンテーション を持つことが多いためオリエンテーションが大きく異なる追跡点をアウトライアとする.この ステップは非常に高速である. ターゲットデータ取得 このアプローチは,モデルベースのアプローチを使用して,あらかじめ準備する特徴データベー スを必要とする. データ取得は,画像ピラミッドを作成する必要がある. 画像ピラミッドは縮 小によって前の大きさから 倍で作成される.最も大きいスケールから最も小さいスケー ルまでの範囲は定義される.画像ピラミッドが作成された後,すべてのスケールで特徴点を検 出する. 最も安定した特徴点に制限するために, つの連続したスケールで検出される特徴点 を利用する. 一方,) つ以上のオリエンテーションがある特徴点は削除される. そして,すべ ての特徴座標と特徴量を保存する. の修正 追跡するための特徴分類は,モデルイメージ中のポイント をモデル化するのに対応する セットのクラス 3 のある特徴 の分配の学習によりモデル化して計算される.そして,ポイン トは,特徴値 を確率を最大にすることによって分類する. 8 $ . / ./ 図 5 に示すように決定木が構築される. 図 5- の決定木 ポイント のイメージ強度 ./ を比較するために, ペアの . / によってパラメータ化され た関数 ./. ./ 8 * . 6 / . 6 / ./ !%& ' ( )*+ **, 一連の 7 がクラス を観察する確率 はベイズの定理を用いて計算することができる. . / 8 . / . / . /. .)/ 分母はスケーリング定数のみである.また,先の . / は一定であると仮定される.確率 . / は,同じモデルポイントおよび対応するクラス 3 の様々な例のための の発生を数えることに より,トレーニング過程の中で学習される.学習画像は,スケール,回転およびアフィン変換 図 7- 学習 , . /.図 7 を参照/ の経験的 の変化により作成される.½ を計算する異なる結果,¾ , な分配について記述する サイズのヒストグラムの中で数えられる.実用的な数の に関し ては,表すことができないくらい大きい. 代わりに,それは完全な分配が格納される と 呼ばれる特徴の部分集合によって近似されている. 固定 サイズ において, 8 は作成される. 次に . / が近似されている確率 . / 8 . /. .0/ 実際上,確率の値を記録し,最後の方程式の確率の結果は合計と取り替えらる.学習された 図 9- 木の表現 つのキーポイントから図 9 に示すように探索木が構築される.木の段数は ) 段で木の葉の葉の !%& ' ( )*+ **, 9 図 1- マッチング 位置データは バイトで頻度の値も バイトのデータ *〜55 となる.図 9 に示すように,注 目する 点の位置を変更した複数の探索木を構築し複数の葉を算出する. マッチングには,図 1 に示すように,未知な入力データを全ての探索木に通して出力値を算出 する.学習で得たキーポイント(例)%〜3)の葉の値から,未知の入力で得た出力値のビット 列の値を取り出し,全ての葉の値を掛け合わせる.こうすることで,% をとる形になり,葉 の値の一番小さな値を取り出すことができる.全てのキーポイントで同様に行い,未知のデー タのビット列から一番確立の大きな(ヒストグラムの大きい)キーポイントを抽出する.階層 が深くなるとノードの数も増加する.ノードの数とメモリーの関係を図 , に示す.7 ノードは 図 ,- 階層の深さとメモリーの増加 バイトのデータとして取り扱え 9 ノード〜 ノードは バイトのデータとなる. 7 ノードが メモリー使用の効率がよいため 7 ノードを採用している. !%& ' ( )*+ **, 1 評価実験 実験に用いる入力画像を図 * に示す.下記に実験に用いる装置を示す. 図 *- 実験データ( : + 2: + : + 2 + + + ;) < = 3 = %? 70 < ,5 < ?, < .'2< >/ 70= > >%9*.'2< / ))*= @% 0* . / ))*= @% 0*.'2< / モトローラ ?,.'2< ,ノキア ,5 の両方 . / は同じ 34 であるため,同 様のベンチマークの結果であると言える;.コードは整数か固定小数点を用いるようにしている が,さらに .固定小数点式のコードをすべて浮動小数点式の変形に取り替えて/ ハードウェア浮 動小数点で ,5.@% 0* 34 かはハードウェア浮動小数点ユニットをを持つ/ をベンチ 34 を マークのテストをする.%? 70 .'2< / は,70= を搭載した > 用いる.これは他の電話より処理能力が上であるといえる.参考のために, = の 3 を搭載したノート上でテストする.コードが電話用に最適化されているため,34 は コアの み使用する. 図 ,図 は,携帯電話上での処理速度を示す.3 での実験では約 5〜* 倍 高速化した.携帯電話での平均処理速度は, 5 である. 図 - = による 3 の全 9 つのデータセットの実験結果 !%& ' ( )*+ **, , 図 - 処理時間の比較 おわりに の論文を調査した. 参考文献 :2 ;!< + A : B: C+ ;( 3 D +D;7*+ ;+ ;,B*+ **0. ' + A %FG*1+ **1 C+ ; EEE ) D; ! 2 ; + A" F F 2 2 C+ EEE B % 2 + D;1+ ;,+ ;075B09,+ **7;
© Copyright 2026 Paperzz