I
永久磁石同期電動機とリラクタンスモータ
電機子回転磁界
電機子回転磁界
N
S
N
N
1
電機子回転磁界
2
S
S
S
N
N
S
N
6
Φ
S N
N
N
S
回転子
S
回転子
S
永久磁石
永久磁石
珪素鋼板
珪素鋼板
珪素鋼板
非磁性体
非磁性体
非磁性体
珪素鋼板?
SPMSM
Surface Permanent Magnet
Synchronous Motor
表面永久磁石構造同期電動機
5
3
IPMSM
Interior Permanent Magnet
Synchronous Motor
埋込永久磁石構造同期電動機
表面に永久磁石を配置し、外部回転磁界 外部磁界との間の磁石力に加え、珪素
との間の磁力で回転する。
鋼板部分のリラクタンスモータとしての
機能もあるハイブリッド型である。
非凸極機である。
凸極機である。
表面永久磁石に働く遠心力に対する強度 永久磁石を回転子内に埋め込むので、
確保が困難で高速には適さない。
永久磁石の保持が容易で高速機に適。
定格効率は誘導機(IM)より良い
定格効率高い
低速効率は IMより良い
低速効率高い
コスト高い
コスト中
低速大トルク IMより良い
低速大トルクにも適する
高速応答 IMより良い
高速応答可
エアコン、自動車、風力発電、μGTなど
SynRM
4
I
SRM
永久磁石型ではないが比較のため取り上げた
Synchronous, & Switched Reluctance Motor
同期 および 、スイッチト リラクタンスモータ
回転磁界または電機子電流の順次切替え
(1Æ2Æ3Æ)により、磁気抵抗(リラクタンス)
が最小になる位置に移動し回転を続ける。
100%リラクタンストルク。
凸極機である。
SRMは構造簡単で堅牢。
高速回転に適する。
定格効率中
低速効率中
コスト低い
低速大トルクにも適する
高速応答可
油圧ポンプ、洗濯機など
Copyright (c) 2006 宮田明則技術士事務所
1
永久磁石同期電動機の解析
ハイブリッド型で代表して解析する
d 軸分の磁束
q 軸分の磁束
d軸
q軸
N
d軸
q軸
S
N
S
S N
S
N
S
N
S
N
S N
q軸
N
S
q軸
d軸
d軸
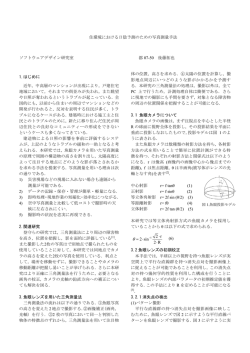
永久磁石の透磁率はほぼ真空に等しいので
q 軸磁束は透磁率の高い珪素鋼板内を通る。
上図は4極であるが、解析は下図の2極機で
行う。
2極の解析用モデル
q軸
vq , iq
d軸
β軸
Lq
Ld
ia
φ
vd , id
Φm
θ=ωt
α軸
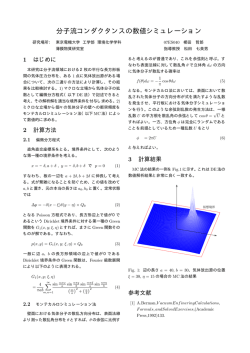
静止座標系をα − β 軸座標系、角速度 ω で
反時計式に回転する回転子の座標系を
d − q 軸座標系で表す。過渡現象を無視し定
常回転時を対象とする。電気子電流のベク
トルの向きを電流が作る磁束の方向にとる。
& 、電気子電流を&i
永久磁石の作る磁束を Φ
m
a
とすれば、静止座標系基準では、
i a = i d + i q = (id + jiq )ε jω t
Φ0 = Φd + Φq
Φ d = (Φ m + Ld id )ε jω t
Φ q = jLq iqε jω t
d
v a = i a r + Φ 0 = (id + jiq )rε jω t +
dt
d
(Φ m + Ld id + jLqiq )ε jω t
+
dt
同期機で、Ld , Lq は一定として微分すると、
= (id + jiq )rε jω t + jω (Φ m + Ld id + jLq iq )ε jω t
d − q 座標系では、上式からε jω tを除いて、
vd + jvq = (id + jiq )r + jω (Φ m + Ld id + jLq iq )
= (rid − ωLq iq ) + j (riq + ωΦ m + ωLd id )
以上から、
vd = rid − ωLq iq
vq = riq + ωΦ m + ωLd id
以上の関係を次頁のベクトル図1 に示す。
Copyright (c) 2006 宮田明則技術士事務所
2
永久磁石同期電動機のフェイザー(ベクトル)図
2極の解析用モデル
q軸
vq , iq
β軸
Ld
ia
Lq
φ
q軸
d軸
vq , iq
vd , id
θ=ωt
iar
ia
Ld
vd , id
Φm
θ=ωt
β
α軸
q
q
ωLq i q
ωLq i q
ωLd i d
v0
d軸
β軸
Lq
Φm
α軸
va
2極の解析用モデル
ωΦ m
iq i
a
φ
i a r ωLd i d
v va
Φ0
0
ia
β
Lq i q
id Φ L i
m
d d
ωΦ m
d
id
iq
Ld i d
Φ0 L i
q q
d
Φm
フェイザー図 (ベクトル図) 1
ia (の作る磁束の)ベクトルがd-q 軸第
1象限にある一般表現図
フェイザー図 (ベクトル図) 2
ia (の作る磁束の)ベクトル
がトルク最大値付近にある図
Copyright (c) 2006 宮田明則技術士事務所
3
回転子の受けるトルクは、電機子(回転磁界 )
に働くトルクの反作用なので、極対数を pと
して (次頁の注参照)、
τ = − pi a × Φ 0
= − p (i d + i q )× (Φ m + Ld i d + Lq i q )
= − pi d × (Φ m + Ld i d ) − pi q × Lq i q
− p (i d × Lq i q ) − pi q × (Φ m + Ld i d )
同相ベクトル間のベクトル積は 0 なので第1,
2 項は 0 、第 3, 4 項は、順序を整理して、
= p {Φ m × i q − i d × i q (Lq − Ld )}
i qと i d 、 i qと Φ mは直交しているので、
τ = p {Φ m iq − (Lq − Ld )iq id }、向きは i d × i q から
回転は反時計方向を正 にとりその軸性ベク
トルは紙面に垂直手前 向きが正となる。
id = ia cos φ , iq = ia sin φ と書いて
τ = p Φ m ia sin φ − p (Lq − Ld )ia2 sin φ cos φ
p (Lq − Ld )ia2 sin 2φ
= p Φ m ia sin φ −
2
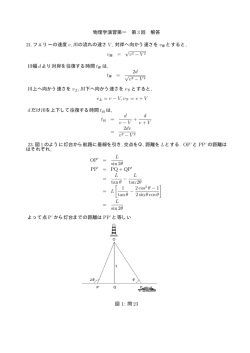
p = 1, Φ m = 1, Lq − Ld = 1, ia = 1とすれば、
τ = cos β + 0.5 sin 2β
となる。β を変化させて τ の図を描くと下図
になる。
τ
1.5
合成トルク
磁石トルク
1
0.5
0
-180
-0.5
リラクタンストルク
-120
-60
0
60
120
180
β
-1
-1.5
上図からわかるように 、トルクの最大を与え
る回転磁界のベクトル (最大値 )の位置は、q 軸
よりも進んだ位置であ ることから、 β > 0 とな
るように i a をとったベクトル図が ベクトル図 2
で、電気学会電気工学 ハンドブックには、こ
π
π
β = φ − と書き換えると、 φ = β + として、 の方式のベクトル図が 掲載されている。
上図の例では、磁石ト ルクの最大値は、回転 磁
2
2
2
p (Lq − Ld )ia sin 2 β
界が β = 0°、すなわち、 q 軸に一致する位置、
τ = p Φ m ia cos β +
リラクタンストルクが 最大になるのは β = 45 °、
2
第 1 項は磁石トルク、第 2 項はリラクタンス であり、合成トルクが 最大になるのは、 β = 30 °
トルクである。
の位置 (q 軸より 30 ° 進み ) のときである。
Copyright (c) 2006 宮田明則技術士事務所
4
注.複素数表示でのスカラー積、ベクトル積
yb
B
A
ya
[行列表示]
A • B = [xa
j
xa
xb
k
i
i
A × B = xa
xb
[複素数表示]
A ∗Bを作って見ると A ∗はAの共役値 、
∗
A ∗B = ( xa + jya ) ( xb + jyb ) = ( xa − jya )(xb + jyb )
= (xa xb + ya yb ) + j ( xa yb − xb ya )
上の行列表示の場合と比較して、
スカラー積 = Re A ∗B = A ∗Bの実数部
ベクトル積 = Im A ∗B = A ∗Bの虚数部
に等しいことが分かる。
(
(
{
(
)(
∗
)}
τ = Im − p iε jω t Φ 0ε jω t
= Im − p (id − jiq )ε − jω t (Φm + Ld id + jLq iq )ε jω t
= Im{− p (id − jiq )(Φm + Ld id + jLq iq )}
= p{iq (Φm + Ld id ) − id Lq iq }
= p{Φm iq − (Lq − Ld )id iq }
となり、d − q 座標系での計算と同じ結果が得ら
れる。
{
⎡x ⎤
ya ]⎢ b ⎥ = xa xb + ya yb
⎣ yb ⎦
j k
x ya
ya 0 = k a
= k (xa yb − xb ya )
xb yb
yb 0
(
前頁のトルクの計算をα − β 静止座標系について
行ってみると、
}
)
)
)
ベクトル積のベクトルの向きは、
A × B の向きとして、紙面に垂直手前
向きである(行列表示から、k 成分 = z方向)。
Copyright (c) 2006 宮田明則技術士事務所
5
© Copyright 2026 Paperzz