GPS と気圧計を組み合わせた移動経路推定手法の開発
The Development of a Method for Migration Path Estimation
Using a GPS receiver and an Atmospheric Pressure Sensor
森下功啓
三田長久
Katsuhiro Morishita
Nagahisa Mita
1. 研究背景と目的
熊本大学大学院 自然科学研究科
Graduate School of Science and Technology, Kumamoto University
1000 m 当たり概ね 10 m 程度である。
近年、約 200 億円ものニホンザルやシカ等による農林業
被害が毎年報告されている。彼らの生態に基づく効果的な
対策が期待されており、GPS を用いた行動調査方法である
GPS テレメトリが広く利用されるようになってきた。
GPS テレメトリは断続的に測位する GPS ロガーを追跡
対象に取り付け、後に回収することにより測位情報を得て
行動を知る手法である。動物の四季折々の行動を把握する
ためには 1 年以上の観測期間が必要であるが、現状では 10
kg 以下の動物では電池重量が重くなりすぎて十分な観測期
間が得られない。更に観測期間を伸ばすために観測機器の
省電力化が強く要請されている。本研究では省電力な観測
方法の開発を目的としている。
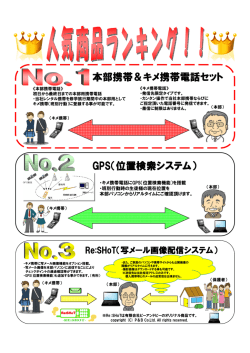
図 1 移動経路推定のイメージ
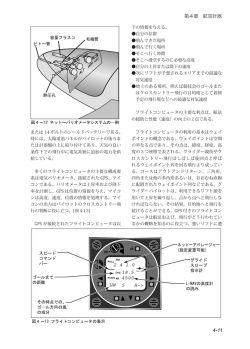
図 2 データの流れ
2.研究方法
現在行われている GPS による高頻度の測位を部分的に
でも他の省電力な測位方法に置き換えることができれば消
費電力は少なくなる。本研究では移動に伴う高度変化の履
歴を基に、移動経路を推定する手法について検討した。高
度は気圧センサを用いて測定することができる。また、気
圧センサは動作に数十μA しか消費しない省電力なデバイ
スである。例えば、5 分毎に GPS で測位する場合と、
GPS が 2 時間毎で気圧が 10 秒毎の観測である場合を比較
すると消費電力は約 3 分の 1 である。
移動経路の推定は、観測された高度と国土地理院が整備
している数値標高データ(以下 DEM)を比較することで
行う。経路推定のイメージを図 1 に示す。時刻を𝑡、最大
移動速度を𝑣𝑚𝑎𝑥 、各点から終点までの距離を𝐿で表してい
る。観測された高度とマッチする座標を全観測データに対
して抽出しながら、速度制限や終点への到達可能性評価に
よって比較的短時間で演算を終える工夫をしている。デー
タの流れを図 2 に示す。GPS のログから始点と終点の座
標を取得し、気圧のログから高度履歴を取得する。最終的
には、推定された経路が KML やマップとして出力される。
気圧から高度を求めるには、式(1)を用いてまず固定局と
の相対高度Δ𝑧を求める。次に相対高度に固定局の高度を足
すことで求めたい移動局の高度が得られる。
∆𝑧 =
𝑇𝑓
𝛾
𝑃
R𝛾
𝑔
{1 − ( ) }
𝑃𝑓
(1)
ここで、𝑔は現地重力加速度[m/s2],γは気温減率[K/m],R
は空気の気体定数[J/kgK],𝑇𝑓 は固定局での気温[K],𝑃𝑓 は
固定局での気圧[hPa],𝑃は移動局での気圧[hPa]である。
固定局は、移動局の高度推定精度を上げるために少なくと
も移動局から 10 km 以内に設置することが望ましい。気
圧から求めた高度の推定精度は固定局と移動局の高度差
3.結果
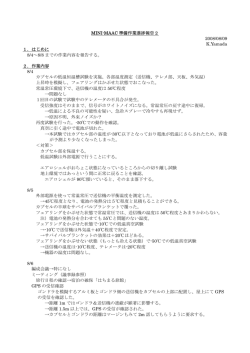
気圧を用いた経路推定の前に、高度情報だけで移動経路
を推定できるのか確認する実験を行った。実験場所は熊本
大学の北側に広がる立田山である。GPS 受信機を用いて移
動中の緯度・経度を取得し、それを基に DEM から高度情
報を取得した。この高度情報と始点・終点の位置座標を独
自開発した経路推定ソフトウェアへ入力し、図 3 の結果を
得た。経路の推定がほぼできていることが分かる。
図 3 左:GPS が記録した経路
右:推定された経路
4.まとめと今後の予定
高度履歴を基にした移動経路の推定は実際に上手く行く
ことが分かった。今後は実際に気圧から高度を推定して移
動経路を推定してみたい。
謝辞
本研究は科学研究費補助金(課題番号 21651006)の交付
を受けている研究であることを付記し、謝意を表します。
© Copyright 2026 Paperzz