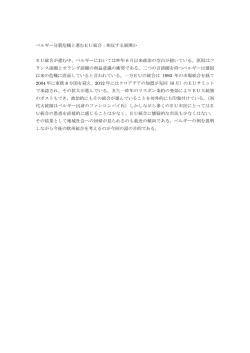
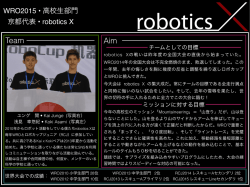
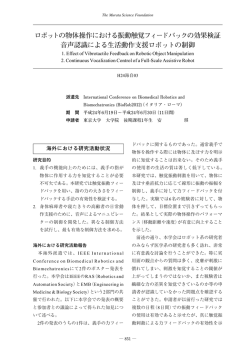
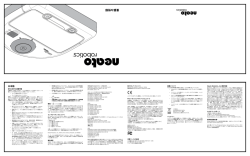
非ホロノミック系制御研究の展望 中村仁彦 東京大学大学院工学系研究科 東京都文京区本郷7 - 3 - 1 E-mail: [email protected] 1 はじめに ロボットが非線形制御の話題に上るとき、代表的なの は 1980 年の Freund[1] の非干渉制御であろう。これは非 線形制御理論のことばでいえば、厳密なフィードバック線 形化の話である。非線形に見えているシステムでもフィー ドバックと座標変換をうまく見つければ厳密に等価な線形 系に変形できる場合がある。特に可制御な線形システムに 帰着できる場合を、厳密なフィードバック線形化可能とい う。通常のロボットマニピュレータの運動方程式は複雑な 非線系性をもつが、実は厳密なフィードバック線形化可能 であり、あとは非干渉化や極配置など自由な設計ができる というものである。また非線形系の可制御性については次 のことが知られている。すなわち、非線形系を状態空間の ある点の周りの微小な範囲で、一次近似として線形化する とき、近似線形化されたシステムが可制御ならもとの非線 形系は可制御である。ただし逆は真ならずである。このよ うな素直な非線形性をもつ普通のロボットが多い中で、素 直でない非線形性をもつロボットがいろいろな問題に現わ れ、これらが共通の力学的・数学的構造をもっている。こ の構造を特徴づけるのが非ホロノミックというキーワード である。 1988 年の夏、イタリアのサロ湖畔で開かれたある会議 では冗長マニピュレータや複腕協調制御などに焦点があ たっていた。駆動冗長性の発表をしながら、私は友人に宇 宙ロボットの運動が非ホロノミックのようなので研究を始 めようとしていることを話した。同じ会議で冗長マニピュ レータの論文を用意していたボストン大学の John Baillieul が、発表では "super-articulated mechanisms" [2] と いう耳慣れない話をしていた。 1989 年の夏の一ヶ月間を マルセイユの地中海工科大学の客員助教授として過ごすこ とになった。出発間際にようやく出来てきた宇宙ロボット の非ホロノミック運動のシミュレーション結果を Ranjan Mukherjee から受け取り、始めの 1 週間でその秋に東京で 開催される International Symposium of Robotics Research [4] [5] で発表する論文にまとめた。原稿を郵送して 数日後、 INRIA に別の友人をたずねた際、同僚の Claud Samson を紹介された。自己紹介にと郵送したばかりの論 文の話をすると興味深そうに聞いてくれ、移動ロボットの 非線形制御の話をしてくれた。東京での ISRR では Greg Heinzinger [6] が Li と Canny と連名で球のローリングコ ンタクトの非ホロノミック性について発表した。古い思い 出話であるが、この間に出会った人や聞きかじった事が後 になってつながり、今日まで私の研究を導いてきている。 1993 年から 94 年にかけて、日本ロボット学会誌にその ころまでの非ホロノミックロボットシステムの研究の流れ を講座として連載する機会をいただいた [16]。本ミニ特集 では重要な成果の紹介だけでなく、最近の研究の方向およ び応用例などを、この分野で活躍されている方々にわかり やすく解説していただくのがねらいである。本稿では非ホ ロノミック系の運動と拘束の関係、非ホロノミック系の制 御の特徴、最近の話題などを簡単に紹介した後、解説・事 例紹介の位置づけを説明し、本ミニ特集の展望とする。 2 2.1 非ホロノミック系とは 単一剛体の空間運動 機械の運動は運動方程式と拘束条件式から定まる。一個 の剛体の3次元空間内での運動を例に、運動と拘束につい て考えてみよう。剛体の空間運動は以下のように Newton の方程式と、 Euler の方程式のペアで表される。 mx =F (1) I !_ + ! 2 (I!) = N (2) ここで x は剛体の質量中心位置、 ! は角速度であり、 m および I はそれぞれ質量と慣性テンソルである。慣性テン ソルは剛体の外部に存在する慣性座標系で表されていると する。すなわち I は剛体姿勢の関数である。さらに外力と して質量中心にかかる並進力 F とモーメント N が加わっ ているとする。もし外力をわれわれの自由にできる入力と することができるなら、 m は正、 I は正定値行列である から、任意な加速度運動を実現することができる。これを 自由度が6という。 2.2 幾何学的拘束 幾何学的な拘束について考える。剛体の形状が実は質 量中心を中心とする半径 r の球であったとしよう。質量分 布は必ずしも一様でなくて良い。この球が重力場で水平 なテーブルの上に接しており、許されているのは球とテー ブル面とで滑べりのない運動であるとする。質量中心から テーブルとの接点に向かう定数ベクトルを r で表すと x_ = 0! 2 r (3) _ が ! に従属的に決ま が運動の拘束条件となる。この式は x ることを表している。したがって自由度は 6 3 = 3 とな る。 (3) 式は ! を入力とする幾何学的な運動方程式と見る ことができる。このとき (1), (2) 式はどんな役割をするの 0 の大局的な形は、6次元の多様体を5つの超曲面で切断し た際に交線として見つけられる1次元の曲線になる。 一方、はじめの幾何学的拘束の例では ! 自身が入力で あるが、 r = (0; 0; r)T を考慮すると (3) 式より 0 x3 Figure 1: テーブルの上を滑べらずに転がる球 だろうか。はじめに、 N , F が存在するためには ! は一回 微分可能でなければならない。 (2) 式は入力 ! をつくるの に等価な N を与える。また (1) 式は重力や接触点での摩擦 力がどうなるかを教える。このように力学系に幾何学的拘 束が加わる系では、運動の自由度という観点からは幾何学 的拘束式を運動を支配する方程式とみなし、本来の運動方 程式はその運動を力学的に矛盾無く生じさせるための補足 的条件と見ることもできる。ちなみに、2輪あるいは4輪 の移動ロボットや、テーブルの上をたおれずに転がるコイ ンのような運動は ! のある方向成分をゼロに保つ自由度2 の運動である。 もう一つ幾何学的な拘束の例として、同じ水平なテーブ ルの上に x1 方向に直線状の溝があり球がこれに沿って運 動する場合を考える。拘束条件は (3) 式のほかに 0 1 0 ! = @ !2 A 0 (4) が新たに加わる。入力の数は1であり、1自由度の運動で ある。 (3),(4) 式をまとめると、結局次の式を得る。 0 1 r!2 x_ = @ 0 A 0 (5) 上式は容易に積分ができ、次の式と等価であることがわか る。 0 1 x1 (t0 ) + r(2 0 2 (t0 )) A x=@ x2 (t0 ) x3 (t0 ) (6) ここで 2 は、球を !2 軸を回転軸とする半径 r の車輪と考 えたときの回転角度である。また (4) 式より 0 1(t0 ) = 0 3 0 3 (t0 ) = 0 1 (7) (8) となる。ここで 1 と 3 は !2 に直交する2軸まわりの角 度である。 (6) ∼ (8) 式の積分の意味が大変重要である。この例で は剛体の6つの一般化座標の間に 5 つの代数的な拘束があ る。したがって !2 の自由度1の入力によって生じる運動 0 x3 (t0) = 0 (9) が得られる。これが唯一の代数的拘束となる。その他の微 分方程式で表された拘束は非可積分であり、代数拘束に帰 着できない。したがって、自由度3の入力によって生じる 運動の大局的な形は、6次元多様体を1つの超曲面で切断 した5次元多様体上の運動となる。また ! のうちテーブル に垂直な成分がゼロ (!3 = 0) の場合には、自由度2の入力 になるが !3 = 0 は代数拘束に帰着できず、やはり5次元 多様体上の運動となる。実は、いずれの場合でも5次元多 様体上で任意な点に到達可能(可制御)となる。 このように拘束式が代数式になるまで積分できる場合に は、運動の現われる多様体の次元を下げて単純な様相で運 動を表現できる。これが拘束条件の可積分性であり代数式 にまで積分できる拘束をホロノミックな拘束とよぶ。すな わち非可積分な微分方程式拘束を受けるのが非ホロノミッ ク系である。 2.3 力学的拘束 (1),(2) 式の剛体が重力の存在しない空間でただよって いる場合を想像して見よう。力学的拘束として、 F O N = N (10) を与える。これによって (1) 式で右辺をゼロとしたものが 拘束式となる。入力は N の3成分であり、自由度は3と なる。この拘束式は次のように2段階で積分される。 mx_ = mx_ (t0 ) x = x(t0 ) + (t 0 t0 )x_ (t0) (11) (12) (11), (12) 式はそれぞれ第一積分、第二積分と呼ばれる。 この場合第一積分は運動量保存則に他ならない。第二積分 は代数的拘束となり、 F = O はホロノミックな拘束であ ることが分かった。代数的な3つの第二積分を用いて、剛 体の大局的な運動は3次元の多様体上に限定される。これ は単一剛体の結果であるが、関節でつながった多体系がゼ ロ並進力で空間に浮遊している場合でも、第一積分、第二 積分が共に存在し、この拘束はホロノミックとなる。 次に力学的拘束として、 F F (13) N = O を取り上げる。入力は F の3成分であり、自由度はやはり 3である。 (2) 式の第一積分が存在し I! = I (t0)!(t0 ) (14) となる。 (14) 式は角運動量保存則である。 I は剛体姿勢 の関数であり。一般には第二積分を持たない。したがって 代数的拘束が存在しないため大局的な運動の多様体は6次 元から下がらない。ただし (1) 式と (14) 式とは力学的な連 鎖は見られないため、この場合の角運動量保存則の運動は 初期条件のみによって決まる不可制御なモードになってい る。 力学的拘束のここでの2つの例は、いずれも第一積分を もつものである。人工衛星上にマニピュレータを搭載した 宇宙ロボットではスラスターやモーメンタムホイールなど を使わないで、マニピュレータの関節運動だけでマニピュ レータと人工衛星の姿勢の両方を制御することができる [5]。この場合も角運動量保存則の下での運動になるが、多 体系の内部(関節)運動と角運動量保存則は力学的な連鎖 をもっているので関節の制御だけで両方が可制御になるの である [17][18]。 力学拘束によっては第一積分さえ持たないものもある。 マニピュレータで非駆動関節をもつ場合はこれに含まれる [15]。この問題については次節で触れる。 3 非ホロノミック系の制御 3.2 非駆動関節をもつマニピュレータでは運動方程式のなか で駆動力をゼロにおく部分があり、これが力学的拘束条件 となる。ある例外をのぞいてこれらの拘束は第一積分さえ もたない非可積分な拘束になる [15]。一般化座標の位置と 速度をまとめて状態変数 x と置くと、このようなシステム は x_ = f (x) + K (x)u (17) で表され、アフィン系とよばれる形式をもつ。対称アフィ ン系と比べれば (17) 式右辺第一項のドリフト項をもつだけ の違いであるが。可制御性の証明も一般的な方法がない。 フィードバック制御系の設計や安定化などもまだ余り成果 が出ていない。荒井裕彦氏にはこの問題を中心に解説して いただく。なお、著者らはこの問題について力学的な個別 の特徴を利用して制御系の構成を論じている [10] [11] [12] [13][14]。 3.3 3.1 力学的拘束 困難なフィードバック制御 幾何学的拘束 非ホロノミック系の制御の特徴は困難なことである。 ホイールや球の転がりを使う非ホロノミック系では前節 のように速度に関する拘束式を運動方程式とみなすことが できる。また角運動量保存則が成り立つ宇宙ロボット、体 操選手や猫の宙返り動作などは純粋な幾何学拘束ではない が、一般化座標の速度の関係で表すことができる。これら は総じて次のような形式をもつ。 Roger Brockett は 1983 年に非線形システムのフィード バックによる漸近安定化についての必要条件を与えた [3]。 Brockett の定理と呼ばれている。驚くことに対称アフィ x_ = K (x)u (15) ここで x 2 Rn は状態、 u 2 Rm は入力である。入力に行 u = u(x) 列を掛けるだけの単純な構造であるが、行列が状態の関数 になっている立派な非線形系である。このような形式を対 称アフィン系と呼ぶ。対称アフィン系の可制御性を調べる のは理論的には可能であるが一般の系に対して、受け入れ 可能な複雑さの計算で調べられるとは限らない。 このシステムについては多くの取り組みがなされ、運動 計画やフィードバック安定化法など重要な成果が蓄積され てきている。これに関してはあとの三平満司氏の解説で詳 しく触れていただく。特に幾何学的拘束のあるクラスのも のは、適当な座標変換とフィードバック入力変換で次のよ うな形式に等価的に変換することができる。 _1 = u1 _2 = u2 _3 = 2 u1 .. . _n = n01 u1 (16) これをチェインド・フォームという。2輪・4輪の移動ロ ボットやトレーラが任意台つながった移動ロボットなどが 典型である。仮定を置いて思い切って単純化すれば、角運 動量保存則から導かれる場合でもチェインド・フォームに 変換できるものがあるとの報告もある。 ンの非ホロノミック系は全てフィードバックによる漸近安 定化が不可能という結論に至る。もう少し詳しく説明すれ ば、 (18) の形の時間不変状態フィードバックで、 u(x) が x に関し て微分可能なものではけっして漸近安定化できないという ことである。この否定的な結論でくくられるクラスと非ホ ロノミック系がしっかりと対応しているのが本当に興味深 い点である。この否定的結論をかいくぐろうと様々なアプ ローチがなされてきた。三平氏の解説を読めば知恵の出し 方、工夫の仕方に興味をもたれること請け合いである。 アフィン系に対してもフィードバック漸近安定化が難し いことには違いない。しかし Brockett の定理はアフィン 系にはすこし歯切れが悪い。また、アフィン非ホロノミッ ク系でも困難無く安定化できるものも存在するのである。 非ホロノミックだけではくくれない非線形系のクラスを意 識しなければならない。 水 平 面 内 の 非 駆 動 関 節 を も つ マ ニ ピュ レー タ で は、 Brockett の定理の前提条件を満たさず、必要条件の判定以 前の門前払いになってしまう。 Brockett の定理の証明に 沿って調べていくと、結局このマニピュレータは時間不変 の滑らかな状態フィードバックで漸近安定化不可能という 結論になった [15]。 水平面内の非駆動関節をもつマニピュレータのベースを ほんの少し傾けて、重力方向と関節軸が角度をなすように すると、マニピュレータは倒立振子になる。倒立振子は重 力のおかげで、例外を除けば、一次近似で得られる線形系 が平衡点の近傍で可制御になることが知られている。水平 面にある時と同様、 Brockett の証明に沿って調べてみて も必要条件を満たしており、漸近安定化できる可能性があ る。倒立振子も非駆動関節の拘束条件が非可積分な非ホロ ノミック系であるが、非ホロノミック系にも関わらず平衡 点への安定化が容易な例である。 わざわざ困難なもののクラスを線引きするのも良い趣 味ではないが、あえて明確にする努力をすれば、われわれ が対象とするべき非ホロノミック系はアフィン系や対称ア フィン系で平衡点近傍での一次近似により得られた線形系 が不可制御なモードをもたず、可制御でも不可制御でもな いモードをもつ場合である。 4 最近の話題 私たちの研究室の非ホロノミック系に関連したテーマか ら2つを紹介しよう。 一つは非ホロノミック・マニピュレータの開発である。 これは N 台のトレイラを1台の移動ロボットで指数安定化 できることに驚き、ちょうど日本学術振興会の外国人研究 員として滞在した Ole Sordalen と共同で、トレイラのよう な拘束条件を腕の中にもつマニピュレータができないかと いう、好奇心から始まったテーマである。 N 関節をもつマ ニピュレータをたった2個のモータで可制御にするという 常識外れの機械設計である。これまでに Fig.2 のようなプ ロトタイプを試作し、理論の実証を行なった [7][8]。博士課 程3年の鄭宇眞はより制御しやすい数学モデルをもチェイ ンド・フォーム・マニピュレータの設計を終え、試作に取 り掛かっている。 Figure 2: 非ホロノミック・マニピュレータ 2 番めの研究テーマは力学的に under-actuated なシス テムの運動制御である。平面2関節のマニピュレータで第 一関節だけモータをもち第二関節は自由に回転する実験装 置を用いている。第一関節の周期運動によって非線形性の ために第二関節は影響を受ける。これをうまく取り出せな いかという思い付きでスタートしたがシミュレーションす るうちに面白い事がわかってきた。周期運動の振幅を角度 e 写像を位相面 誤差に応じて変化させてやると、 Poincar で閉軌道に安定化するようなアトラクターが作れるのであ る。しかもその閉軌道をある程度自由に選ぶことができる のである。これを用いて2つの関節を同時に任意な角度に 停止させることを実現した。興味深いのは、2リンクの単 純な構造のロボットであるが、周期運動の振幅を大きくす ると、カオス的な挙動を示すことが明らかになったことで ある [13][14]。やはり博士課程3年の鈴木高宏は周期運動 e 軌道を、 Averaging Method に の結果現われる Poincar よって解析的に求め under-actuated 系の制御系設計を行 なう事を研究中である [19]。 5 解説・事例紹介の位置づけ 本ミニ特集は 3 編の解説と 3 編の事例紹介から構成され ている。 解説では、はじめに山田克彦氏が微分形式を表現のツー ルとして用いることについて述べている。微分方程式で表 される運動方程式と拘束条件式を扱うのが、非ホロノミッ ク系の問題であるが、微分形式はこれらの式をより単純な 形式で表すことのできる表現である。微分形式によってさ まざまな力学の問題が見やすい形式に縮約され、対称性な どの重要な数学的な構造をわれわれに見せてくれる可能性 がある。山田氏は、微分形式によって積分可能性条件であ る Frobenius の定理や、非ホロノミック系に周期入力を与 えた際の状態の変化量を計算する Stokes の定理や Gauss の定理 [20] などが、統一的に単純に表されることを紹介し た後、角運動量保存の下での 3 次元宇宙ロボットの運動の 問題に関する氏らの研究成果を紹介している。衛星の姿勢 表現には Euler パラメータを用いている。これらの力学構 造に素直な数学表現を用いることは、古典力学の手法とし て古くに確立されているが、機械システムの運動や制御理 論の表現形式としては新しい。 1993 年に Don Tilbury ら [21][22] が微分形式の Goursat Normal Form を用いた議論をして以来、微分形式(あ るいは外微分形式ともいう)を用いた非線形制御理論が非 ホロノミック系の話題を出発点として広がって来ている。 特に、 Pierre Rouchon と Michel Fliess ら [23] [24][25] は 非線形制御系を特徴づけるものとして、外微分形式に基づ いて dierential atness という概念を導入している。これ を用いれば非アフィンな非線形性や陰関数などを外微分形 式の様々な数学的道具立てを利用して統一的に扱えるよう になる。トレイラを引く移動ロボットでは通常、トレイラ はリヤカーの様な2輪モデルで表され、連続するリヤカー は一方の車軸の中央でもう一方のリヤカーとピボット結合 されると仮定している。これを崩すとチェインド・フォー ム変換などが行なえなくなるため、大きな制約であった。 Rouchon ら [23] はこの仮定を満たさないより現実的なト レイラモデルでも atness の概念を使えば、扱えることを 示した。また atness は厳密なフィードバック線形化可能 性とも密接に関係しており、非線形制御理論の基礎的な枠 組として今後の展開に注目したい。 二編目の解説では、三平満司氏が移動ロボットなどの対 称アフィン形式をもつ非ホロノミック系に対するフィード バック・コントローラの設計についての最近の成果を紹介 している。この分野ではヨーロッパを中心に日本、アメリ カの非線形制御理論のエキスパートたちが活躍し、多くの 理論的成果が蓄積されつつある。三平氏は時間軸状態制御 形を早くから提案し、独特のアプローチを展開してきてい る。解説では、氏の提案する設計法のみならず、時変コン トローラ、不連続フィードバックなどのさまざまな最近の 成果について、分かりやすく紹介していただいた。特筆す べきは、これらの多くの設計法を 2 輪移動ロボットに適用 し、シミュレーションによってパラメータ誤差の許容度、 観測雑音に対する感度などを公平に評価している事であ る。 Table 1は読者にとって、他のどこにも見ることので きない重要な情報であろう。 解説の三編目は荒井裕彦氏による2階非ホロノミック 系についてのものである。動力学的な拘束条件は2階の微 分方程式で表される。これが1階の積分までを許す場合が 宇宙ロボットなどの角運動量保存則であり、2階の積分を 許すのが運動量保存則(全質量中心の等速直線運動則)で ある。非駆動関節をもつ平面マニピュレータでは、例外を 除いて、1階の積分をも許されず保存量をもたないことが 知られている。2階非ホロノミック系はドリフト項をもつ 点で、移動ロボットや宇宙ロボットなどの対称アフィン系 とは一線を画し、非線形系の中でもより一般的なアフィン 系に属している。著者らも最近この分野の非ホロノミック 系の問題に取り組んでいる。荒井氏は 1989 年に非駆動関 節をもつマニピュレータの制御について、本学会論文集に 先駆的な論文を発表して以来、この分野で多くの成果をあ げている。最近では、ベースに近い2関節を駆動、第3関 節を非駆動とするマニピュレータに対して動力学的な撃心 に着目して、可制御性の証明、フィードバック制御系の設 計法などを提案している。解説では、2階非ホロノミック 系の定式化から最近の多くの研究までを分かりやすく紹介 していただいた。7章の最後で触れているように最近、井 村らによって、3関節非駆動マニピュレータが対称アフィ ン系の一つの正準形であるチェインド・フォームを2階の システムに拡張した形式となることが指摘された。対称ア フィン系と対応をなすこのようなアフィン系がどんな広が りをもつのか興味深い展開である。 具体例によって読者の理解を深めていただくために、事 例紹介としてそれぞれ特徴のある三編の論文が寄せられて いる。 2次元のエアーテーブルで浮上させた宇宙ロボット実験 装置が多い中で、岩田敏彰氏は3次元世界での宇宙ロボッ トの非ホロノミック運動制御を実証すべく、北海道上砂 川町にある(株)地下無重力実験センターで落下実験を行 なっている。限られた空間と時間(10秒)を有効につか う実験法とその結果を紹介していただく。実は、著者らも 岩田氏の協力を得て同実験センターを利用しているが、落 下開始により無重力になった直後にロボットを静かに宙に 浮かせる切離し装置で岩田氏らは実に多くの工夫をしてい る。 河村隆氏の事例紹介は「ねこひねり」ロボットについて である。宇宙ロボットなどの非ホロノミック運動がシミュ レーションによって研究され始めていた早くから、河村氏 らは物理現象としての「ねこひねり」の不思議を工学的に 解明しようと、実験的な研究を行なってきた。2つの円柱 の軸が一点で交わるようにユニバーサルジョイントでつな いだものをねこのモデルとしている。軸のなす角を一定と して、一方の円柱からみてもう一方が運動するよう内力で 駆動するとき(このときユニバーサルジョイントの2つの 関節角の空間で、軌道は閉じた円を描く)、外部の慣性座 標系からみた落下中のねこの体は角運動量が零であっても 回転する。河村氏は運動をねこの質量分布(太っているか 痩せているか)をパラメータにとって解析している。また 空気圧人工筋を用いた背骨機構で構成した実験装置で、落 下中のねこひねり動作を実現している。 羅正華氏の事例紹介は、非ホロノミック系の制御理論を 用いることを前提に新しい機械を開発するという点で、先 の2つと異なる方向性をもっている。羅氏はテーブルの x, y , の3軸を2つのモータで駆動するメカニズムを提案 している。これは2つのボールを車輪(車球?)にした移 動ロボットと見ることもできる。各モータのホイールは1 個のボールを回転させる。地面とボール、ホイールとボー ルの間の拘束により運動が決定される。羅氏はシステムが チェインド・フォームをもつ対称アフィン系であることを 示し、チェインド・フォーム系を加速度を入力とする系に 変換したのち最短時間制御則を適用することで自然な動き を得られるとしている。 以上まとめると、本ミニ特集では、微分形式による系 の表現、対称アフィン系のフィードバック制御、2階非ホ ロノミック系など、最近の代表的な話題について詳しく分 かりやすい解説をはじめに配した。さらに理解を深めるた めの具体例として、3次元非ホロノミック運動の実験法、 新しい非ホロノミック機械の開発などの事例を紹介してい る。 6 おわりに 最近、ロボット関係の会議でも非ホロノミックやホ ロノミックなどの単語が色々な論文のタイトルに現われ たり、人の会話にも上るようになっている。このような機 構、力学、制御、数学が関係する分野がまだ深く興味ある フロンティアとして目の前に存在することに感謝したい。 非ホロノミック系はずっと大きな広がりをもつ非線形問 題の入口のように考えられる。非線形力学、カオス、複雑 系からロボットの知能へまだまだ面白いことが、山積みに なっている。若い元気な大学院生のみなさん、こっちへ来 ませんか。 References [1] Freund, E., "Fast nonlinear control with arbitrary pole-placement for industrial robots and manipulators", International Journal of Robotics Research, vol.1-1, pp.65-78, 1982. [2] Baillieul, J., "Stable average motions of mechanical systems subject to periodic forcing", Fields Institute Communications, Vol. 1, 1993. [3] Brockett, R.W., "Asymptotic stability and feedback stabilization", in Dierential geometric control theory, R.W. Brockett, R.S. Millmann, H.J. Sussmann eds., Birkhauser, Boston, pp.181-191, 1983. [4] Nakamura, Y., and Mukherjee, R., "Bi-directional approach for nonholonomic path planning of space robots", Prepr. 5th Intern. Sympo. Robotics Research, pp. 101-112, Tokyo, Japan, August, 1989. also in Robotics Research: The Fifth International Symposium, eds. H. Miura and S. Arimoto, MIT press, pp. 405-416, 1990. [5] Nakamura, Y., and Mukherjee, R., "Nonholonomic path planning of space robots via a bidirectional approach", IEEE Trans. Robotics and Automation, Vol. 7, No. 4, pp. 500-514, 1991. [6] Li, Z., Canny, J., and Heinzinger, G., "Robot motion planning with nonholonomic constraints, in Robotics Research: 5th International Symposium of Robotics Research (Tokyo, 1989), MIT press, pp.309-316, 1990. [7] 中村, Sordalen, 鄭," 非ホロノミック・マニピュレー タの理論的設計と非線形制御", 日本ロボット学会誌, Vo.13-5, pp.674-682, 1995. [8] 中村, 鄭, Sordalen," 非ホロノミック・マニピュレー タの実験的研究", 日本ロボット学会誌, Vol.14-5, pp.694-702, 1996. [9] Nakamura, Y., and Iwamoto, R., "Stabilization of the shape of space multibody structure with freejoints", Proc. IEEE/RSJ International Workshop on Intelligent Robotics and Systems, Yokohama, Japan, July, 1993. [10] 中村, 岩本," 自由関節で連結された宇宙構造物の形状 制御", 日本ロボット学会誌, Vol.11-6, pp.883-891, 1993. [11] 中村, 岩本," ドリフト項をもつ非ホロノミック機械の 制御", 日本ロボット学会誌, Vol. 13-6, pp.830-837, 1995. [12] Nakamura, Y., and Iwamoto, R., "Space multibody structure i connected with free joints and its shape control", Proc. of 32th CDC, pp. 3126 -3131, 1993. [13] Suzuki, T., Koinuma, M., and Nakamura, Y.,"Chaos and nonlinear control of a nonholonomic free-joint manipulator", Proc. IEEE International Conference on Robotics and Automation, Vol.3, pp. 2668-2693, Minneapolis, MN, 1996. [14] 中村, 濃沼, 鈴木," 自由関節を持つ平面アームのカオ ス的挙動と非線形制御 { ドリフトを持つ非ホロノミッ ク機械の制御 {", 日本ロボット学会誌, Vol. 14-4, pp.602-611, 1996. [15] Oriolo, G., and Nakamura, Y., "Free-joint manipulators: motion control under second-order nonholonomic constraints", Proc. IEEE/RSJ International Workshop on Intelligent Robotics and Systems, pp. 1248-1253, Osaka, Japan, November, 1991. [16] 中村, " 非ホロノミックロボットシステム", 講座全 5回、日本ロボット学会誌、 Vol.11, No.4-7, Vol.12, No.2, 1993-1994. [17] Nakamura, T., "Integrability of dynamic constraints of underactuated mechanisms," Proc. 6th International Conference of Robotics Research (also in Robotics Research, The Sixth International Symposium), Pittsburgh, Pennsylvania, 1993. [18] Nakamura, Y., and Mukherjee, R.,"Noetherian perspective of Eulerian motion of a free rigid body", AIAA Journal of Guidance, Control, and Dynamics, Vol.20, No. 1, pp.193-196, 1997. [19] Suzuki, T., and Nakamura, Y., "Nonlinear control of a nonholonomic free joint manipulator with the averaging method", Proc. IEEE Conference on Decision and Control, pp.1694-1699, Kobe, japan, 1996. [20] Mukherjee, R.,"Reorientation of a structure in space using a three link manipulator", Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 2079-2086, Yokohama, 1993. [21] Tilbury, D., Murray, R., and Sastry, S.,"Trajectory generation for the N-trailer problem using Goursat normal form", Memorandom no. UCB/ERL M93/12, Electronics Research Lab., University of California, Berkeley, 1993. [22] Bushnell, L., Tilbury, D., and Sastry, S.,"Extended Goursat normal form with application to nonholonomic motion planning", Proc. IEEE Conference on Decision and Control, San Antonio, Texus, 1993. [23] Rouchon, P., Filiess, M., Levine, J., and Martin, P.,"Flatness, motion planning and trailer systems", Proc. IEEE Conference on Decision and Control, pp.2700-2705, San Antonio, Texus, 1993. [24] Martin, P., "A geometric sucient condition for atness of systems with m inputs and m+1 states", Proc. IEEE Conference on Decision and Control, pp.3431-3436, San Antonio, Texus, 1993. [25] Fliess, M., Levine, J., Martin, P., and Rouchon, P.,"Nonlinear control and Lie-Backlund transformations: towards a new dierential geometric standpoint", Proc. IEEE Conference on Decision and Control, pp.339-344, Lake Buena Vista, FL, 1994.
© Copyright 2026 Paperzz