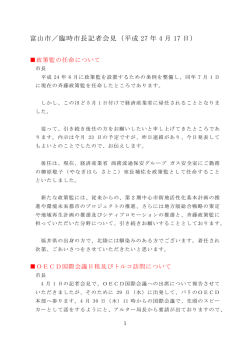
車載用フライホイールのジャイロ機能に関する研究 Gyro Function of Flywheel as Energy Storage System of Vehicles フライホイール式エネルギ貯蔵装置 車載用フライホイールのエネルギ授受 車両加速時(エネルギ供給) パワ ー 密度[W /kg] 1 05 電気二重層キ ャパシタ 1 04 増大 減少 フライホ イー ル 1 03 車両減速時(エネルギ回生) 1 02 二次電池 1 01 試験車両 in ロッテルダ ム 車載用エネ ルギ貯蔵装置の有力候補 フライ ホイー ル式エネルギ 貯蔵装 置は エネ ルギ密度,出力密度, 寿命,環境面 に優位性がある エネルギ移動 エネルギ移動 10-1 10 0 101 102 103 エネ ルギ密度 [Wh/kg] モー タ 駆 動機構 三相交流 モータ 駆動機 構 三相交流 コンバ ータ 付加質量,車両への影響について課題 がある 橋桁上 でフ ライ ホイールの みの 動力源 車載フライホイール評価実験装置 ジャイロによる車両運動制御の提案 共同 研究 : ジェイテクト、CCM 400V3相交流電源 コンバータ 車両減速時のエネルギを回生し、 回転エネルギとして保存 有効 エネ ルギ量 4k Wh 最大 出力 325 kW 定格 出力 200 kW 原理 ジャイロ モー メン ト ジャイロの角運動量変化 ★ 能動形 式 AC /DC コンバータ FWコンバータ T :入力トルク ジャイ ロモー メント L* O 回転 数 11 00 0r pm 22 00 0r pm 放電抵抗 フ ライ ホイール電 動機 ユニット質量 フライホイール(FW) x 10 ang ular velo city [rpm ] 1.5 評価試験装置 真空容器内 約3×1 0-4気圧 常 用回 転数14000rpm∼15000rpmにおいて 約 1.7kWの 損失 4 外乱トルクの吸収効果 375 kg トルクの増幅効果 r ot at io nal s peed ロー ル軸 ヨー 軸 ロール 軸 1.48 スタビライ ザ 1.46 ダンパ アクチュエー タ 1.44 横転防止制御シ ステ ム 1.42 1.4 短期 貯蔵によるピーク エネルギ平準 化 0 100 200 300 tim e [sec] 400 鉄道車両の蛇行動現 象の安定化 ジャイロを用いた車 体傾斜システ ム 500 横転防止制御システム ジャイロを用いた車体傾斜システム 鉄 道における振子車 両 MBD汎用ソ フトSIMPACKで作成 ロ ールモー メント吸収 T O :フライホ イー ル座標系の角速度ベ クト ル L* :フライホ イー ル座標系に おけ る角運動量 外乱トルク 慣性による緩和曲 線での振 り遅れ が課題 横転危険信号 空気圧 シリンダなどによりアクティブ制御 ジャ イロを用いた傾斜 制御 外部ジ ンバル拘束 ジ ンバル軸まわりにジャイロを 回動し,ジ ャイロ モーメント を付加 ジ ャイロを用いて 過渡特性の向上を図る 10.5t 大型車両モデ ル 車速 80km/h,ステップ実 舵角 6deg 制 御無し yes Y[m ] 内部ジ ンバル拘束 30 160 25 120 横転 40 横転 20 ジャイ ロモー メント 15 10 5 0 0 40 80 2自 由度車 両モデルに よるシミュ レーショ ン 入口緩和曲線 ロー ル角 200 80 制御ト ルク ジャイ ロ角運動 量56 20 Nms 制 御有り 走行軌跡 12 0 1 60 0 200 0 4 X[m] 8 12 ti me [se c] 16 over centrifug al acc.[G ] no rol l an g le [d eg ] ジ ンバル角30deg 回転数 ,エネルギ量 J -0.05 大型車の走行シ ミュレ ーシ ョン My% Cy% Ky 0 T y v eloci t y[km/h] 20 2000 1000 6000 20 40 60 0 8 ti me[sec] 100 120 140 hig h-t ensi l steel maragi ng steel CFR P 1500 7000 10 00 2500 h igh- t ensil st eel m ar agin gst eel C FR P 8000 rot ati on speed[rad/ s] 30 0 20 40 60 80 ti me[s ec] 100 12 0 14 0 5000 20 40 5 60 80 ti me[s ec] 100 2 22 V 0 0 2 11 V ★ 減衰行 列での連 成 により安定 化を図 る エネルギ量 9000 angul ar moment um[Nms] 40 L 56 20N ms L 1400 0Nm s y 横 転防 止制御 とエネルギ貯 蔵の両 立が 可能 角 運動 量 m 0 ,C 0 I M 12 0 14 0 y 2 22 V C T 0 0 l at era l di s pl a ce me n t [mm ] 10モード 0 本則速 度 75km/h 10 鉄道車両の蛇行動現象の安 定化 min 横転防止制御シ ステム 車体傾斜システ ム 2 m in R400m 非振 子車両 自 然振子 車両 提案方 式 共 同研究:筑波 大学 藪野 研究室 車 両進行 方向 に回転軸 を有 するジャ イロを設 置 ジャイ ロによりヨーイ ングの スタビリティ向上を図る ★剛 性行 列での連 成により不安 定化 > 1 J 2 定曲線 240m 0 t im e[sec] y 2 ma x 緩和曲 線80m 0.05 20 車両 運動 制御に必要 な角運動 量 1 J 2 出口緩和曲線 0.1 -0.1 フライ ホイー ルの下 限回 転数にお ける角 運動量 使 用回転数 域 定曲線区間 0.15 エネルギ特性とジャイロ機 能の両立 両立の条件 100km/h走 行 を想定 4 G yro 0 rpm G yro 40 0 0rp m 2 ,K 2 0 2 11 V J 0 b r0 11 2 22 0 0 J 0 理論 領域: 不安定 安定 1/10スケール 実験 装置 0 -2 -4 0 実験結果 1 2 3 t im e [s e c] 」 4 5 実験v s理論
© Copyright 2026 Paperzz