F
STANBUL KÜLTÜR ÜNVERSTES
FEN BLMLER ENSTTÜSÜ
KESRL KISM TÜREVL DFERANSYEL DENKLEMLERN
SAYISAL ÇÖZÜMLER
DOKTORA TEZ
Mehmet Fatih UÇAR
0709241035
Tezin Enstitüye Verildi§i Tarih
:
10.01.2012
Tezin Savunuldu§u Tarih
:
07.02.2012
Tez Dan³man:
Yrd. Doç. Dr. S. Hikmet ÇALAR (.K.Ü.)
Di§er Jüri Üyeleri:
Prof. Dr. Behiç ÇAAL (.K.Ü.)
Prof. Dr. Erol BALKANAY (.K.Ü.)
Doç. Dr. Ayla AYLI (Y.T.Ü.)
Yrd. Doç. Dr. I³m GENÇ DEMRZ (Y.T.Ü.)
UBAT 2012
ÖNSÖZ
Bu çal³mann hazrlanmasnn ba³ndan sonuna kadar, bir çok ki³i tarafndan
desteklendim ve yol gösterildim. Bütün bu ki³ilere ³ükranlarm sunuyorum.
Öncelikle en derin ve en içten ³ükranlarm çal³mann her a³amasnda eme§i
olan, bana yol gösteren, rehberlik eden dan³manm Yard. Doç. Dr. Hikmet
ÇALAR'a sunuyorum. Onun deste§i ve önerileri bu tezin tamamlanmasnda
çok de§erli olmu³tur. Onun misyonu, geli³memde ve dü³üncelerimi
geni³letmemde çok yardmc olacaktr.
kinci olarak çal³ma arkada³m Canan AKKOYUNLU'ya her türlü
katklarndan dolay te³ekkürü borç bilirim. Doktoramn ders ve tez
a³amasndaki yardmlarn unutmayaca§m.
Bir üyesi olmaktan övündü§üm stanbul Kültür Üniversitesi'nde üzerimde
eme§i olan herkese özellikle Matematik-Bilgisayar Bölümü hocalarma ve
arkada³larma de§erli yardmlar, katklar ve destekleri için çok te³ekkür
ediyorum.
Son olarak, çal³mann her a³amasnda bitmez tükenmez destek ve fedakarlklar
için aileme, tüm sevdiklerime ne kadar te³ekkür etsem azdr. Sizlere en derin
sevgi ve ³ükranlarm sunuyorum. yi ki varsnz...
OCAK 2012
M. Fatih UÇAR
ii
ÇNDEKLER
EKL LSTES
ÖZET
........................................................
v
...................................................................
vi
SUMMARY
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . viii
1
GR
2
KESRL KISM TÜREVL DFERANSYEL DENKLEMLER
...............................................................
VE KESRL TÜREV FORMÜLLER
3
...........................
1
3
2.1
Kesirli Ksmi Türevli Diferansiyel Denklemler
. . . . . . . . . . .
3
2.2
kinci Mertebeden Ksmi Türevli Diferansiyel Denklemler . . . . .
4
2.2.1
Eliptik Denklemler
. . . . . . . . . . . . . . . . . . . . . .
5
2.2.2
Parabolik Denklemler . . . . . . . . . . . . . . . . . . . . .
6
2.2.3
Hiperbolik Denklemler
. . . . . . . . . . . . . . . . . . . .
6
2.3
Grünwald-Letnikov Kesirli Türevi . . . . . . . . . . . . . . . . . .
7
2.4
Riemann-Liouville Kesirli Türevi
2.5
Caputo Kesirli Türevi
. . . . . . . . . . . . . . . . . .
11
. . . . . . . . . . . . . . . . . . . . . . . .
12
2.6
Erdelyi-Kober Kesirli Türevi . . . . . . . . . . . . . . . . . . . . .
14
2.7
Riesz Kesirli Türevi(Potansiyeli) . . . . . . . . . . . . . . . . . . .
15
2.8
Hadamard Kesirli Türevi . . . . . . . . . . . . . . . . . . . . . . .
15
2.9
Marchaud Kesirli Türevi
. . . . . . . . . . . . . . . . . . . . . . .
15
..........................................
17
SAYISAL YÖNTEMLER
3.1
Spline(Ara Enterpolasyon) Fonksiyonlar ve Metodu . . . . . . . .
17
3.2
Non-polynomial Kübik Spline Fonksiyonu ve Metodu
. . . . . . .
19
3.3
B-Spline Metodu
. . . . . . . . . . . . . . . . . . . . . . . . . . .
21
3.4
Sonlu Eleman(Galerkin) Metodu . . . . . . . . . . . . . . . . . . .
25
iii
4
5
SAYISAL ÖRNEKLER
............................................
28
4.1
Problem 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
28
4.2
Nümerik Da§lm Ba§ntlar . . . . . . . . . . . . . . . . . . . . .
31
4.3
Problem 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
38
4.4
Problem 3
45
SONUÇ
.............................................................
KAYNAKLAR
ÖZGEÇM
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
54
.........................................................
55
............................................................
70
iv
EKL LSTES
3.1
1. dereceden spline fonksiyonu
. . . . . . . . . . . . . . . . . . . .
3.2
Non-polynomial kübik spline fonksiyonlar
3.3
B0,i (x)
3.4
18
. . . . . . . . . . . . .
19
taban
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
B1,i (x)
taban
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
24
3.5
B2,i (x)
taban
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
24
3.6
B3,i (x)
taban
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
25
3.7
apka fonksiyonlar
. . . . . . . . . . . . . . . . . . . . . . . . . .
27
4.1
(4.26) ve (4.34) nin kar³la³trlmas . . . . . . . . . . . . . . . . .
33
4.2
Problem 1 de
4.3
Problem
2
de
u(x)
in gra§i (
4.4
Problem
2
de
v(x)
in gra§i (
4.5
Problem
3
te
u(x)
in gra§i (
4.6
Problem
3
te
v(x)
in gra§i (
u(x, t)
nin çözüm gra§i,
n = 81, k = 0.01
. . . . .
37
n = 41)
. . . . . . . . . . . . . . . .
44
n = 41)
. . . . . . . . . . . . . . . .
45
n = 41)
. . . . . . . . . . . . . . . .
52
n = 41)
. . . . . . . . . . . . . . . .
53
v
Üniversitesi
:
stanbul Kültür Üniversitesi
Enstitüsü
:
Fen Bilimleri
Anabilim Dal
:
Matematik-Bilgisayar
Program
:
Matematik
Tez Dan³man
:
Yrd. Doç. Dr. S. Hikmet ÇALAR
Tez Türü ve Tarihi
:
Doktora - Ocak 2012
ÖZET
KESRL KISM TÜREVL DFERANSYEL DENKLEMLERN
SAYISAL ÇÖZÜMÜ
Mehmet Fatih UÇAR
Çal³mada kesirli türevli diferansiyel denklem sistemlerinin ve kesirli
ksmi türevli diferansiyel denklemlerin nümerik çözümü ele alnm³tr.
Bu diferansiyel denklemlerin nümerik olarak çözümünde
non-polynomial spline ve Galerkin sonlu eleman metodlar
uygulanm³tr. Problemlerdeki kesirli türev terimi için Caputo kesirli
türevi kullanlm³tr. Bu yöntemlerin uygulanabilmesi için özellikle
spline metodda
Mi
momentlerini elde etmek için Taylor açlm
geli³tirilmi³tir. Sonuç olarak da önemli nümerik sonuçlar elde
edilmi³tir. Kesirli türevli difüzyon problemine spline metod
uygulandktan sonra metodun test edilmesi için nümerik da§lm
analizi yaplm³tr ve olumlu sonuç alnm³tr. Çözülen tüm
problemlerde elde edilen nümerik sonuçlarn analitik çözümlerine
yaknsad§ görülmü³tür. Bu metodlarn bu tür problemler üzerinde
uygulanabilirli§i ispatlanm³tr.
vi
Anahtar Kelimeler
:
Kesirli ksmi türevli diferansiyel denklem, Caputo
kesirli türevi, Da§lm analizi, Non-polynomial
spline metodu, Galerkin metodu
Bilim Dal Saysal Kodu
:
0924
vii
University
:
stanbul Kültür University
Institute
:
Institute of Science
Science Programme
:
Mathematics and Computer
Programme
:
Mathematics
Supervisor
:
Asist. Prof. Dr. S. Hikmet ÇALAR
Degree Awarded and Date
:
Ph.D. - JANUARY 2012
SUMMARY
NUMERICAL SOLUTIONS OF FRACTIONAL PARTIAL
DIFFERENTIAL EQUATIONS
Mehmet Fatih UÇAR
In this thesis, numerical solutions of fractional partial dierential
equations and system of fractional ordinary dierential equations are
considered. Non-polynomial spline method and Galerkin nite
element methods are applied for the equations above. Caputo
fractional derivative is used for fractional derivative term. Taylor
expansion is used to obtain
Mi
moments in spline method. In order to
test accuracy of the spline method applied to fractional diusion
equation, numerical dispersion analysis is applied and useful results
are obtained. It is concluded that in all the problems numerical
results converge to the exact solutions when h goes to zero. It yields
results compatible with the exact solutions and consistent with other
existing numerical methods. Use of non-polynomial splines and
Galerkin method have shown that they are applicable methods for
this type of equations.
viii
Keywords
:
Fractional partial dierential equation, Caputo
fractional derivative, Dispersion analysis,
Non-polynomial spline method, Galerkin method
Science Code
:
0924
ix
Bölüm 1
GR
Kesirli türevler teorisi, herhangi reel veya kompleks mertebeden türevler teorisidir. Kesirli türev kavram ilk olarak bundan 317 yl önce 1695'te L'Hospital'in
Leibniz'e sordu§u "
dn y
türevi
dxn
n=
1
için ne anlam ifade eder?" sorusuyla ortaya
2
√
d1/2 x türevi x dx : x e e³it olacaktr. Bu açk bir
çkm³tr [1]. Leibniz bu soruya "
paradokstur ancak bir gün yararl sonuçlar elde edilecektir" cevabn vermi³tir.
Leibniz'in bu cevab key mertebeden integral ve türevler teorisinin tannmasna
öncülük etmi³tir ki 19. yüzyln sonlarna kadar Liouville, Grünwald, Letnikov,
Riemann, Caputo, Euler, Abel, Fourier, Kober, Erdelyi, Hadamard, Riesz ve Laplace gibi birçok ünlü teorik ve uygulamal matematikçi bu teoriye büyük katklar
yapm³tr.
30 yl öncesine kadar bu teoriyle genelde teorik matematikçiler ilgilenirdi fakat
30 yldr bu teori birçok de§i³ik alanlardaki uygulamalarda da kullanlmaya ba³lanm³tr. Son yüzylda kesirli türevler ve integraller reoloji, elektrik mühendisli§i, elektrokimya, viskoelastisite, biyoloji, biyozik, biyomühendislik, sinyal ve
görüntü i³leme, mekanik-mekatronik, zik ve kontrol teori gibi mühendisli§in ve
matemati§in hemen her alannda uygulanm³tr [2-18].
Bu bilgiler do§rultusunda bizim hazrlad§mz tez çal³mas be³ bölümden olu³maktadr.
kinci bölümde, kesirli türevlere ve yukarda sözü edilen büyük matematikçilerin
kesirli türevler teorisine yaptklar katklara yer verilmektedir.
Üçüncü bölümde, bu çal³mada uygulanan nümerik metodlara yer verilmektedir.
Dördüncü bölümde ise, yaplan orjinal çal³maya, çözülen problemlere yer veril-
1
mektedir.
Bu çal³mada, bir kesirli difüzyon denklemi ile lineer ve lineer olmayan iki kesirli
türevli diferansiyel denklem sistemi non-polynomial spline ve sonlu eleman metodlar ile nümerik olarak çözüldü. lk problem için da§lm analizi yapld.
Be³inci bölümde de sonuç yer almaktadr.
2
Bölüm 2
KESRL KISM TÜREVL DFERANSYEL
DENKLEMLER VE KESRL TÜREV
FORMÜLLER
2.1
Kesirli Ksmi Türevli Diferansiyel Denklemler
Ba§ml de§i³kenlerin türevlerini içeren her ba§nt bir diferansiyel denklem olarak kar³mza çkar. Bir diferansiyel denklemde bir ba§ml de§i³ken bir ba§msz
de§i³kene ba§l ise bu diferansiyel denkleme adi diferansiyel denklem, e§er bir ba§ml de§i³ken birden fazla ba§msz de§i³kene ba§l ise, bu diferansiyel denkleme
ksmi türevli diferansiyel denklem denir. Bir ksmi türevli diferansiyel denklem, bir
ba§ml de§i³ken ve bu ba§ml de§i³kenlerin türevlerini içeren bir ba§nt olarak
tanmlanr. Örne§in,
u = u(x, t)
olsun, yani
u
ba§ml de§i³keni
x
ve
t
ba§m-
sz de§i³kenlerine ba§l olsun. Bu de§i³kenleri içeren bir ksmi türevli diferansiyel
denklem en genel halde
F (x, t, u, ux, ut , uxx , utt , uxt, ...) = 0
³eklinde yazlabilir.
Ksmi türevli diferansiyel denklemler tamsay mertebelidir. Genel haliyle verilmi³
F
ba§ntsndaki türevlerden en az birinin mertebesinin kesirli olmas durumunda
bu diferansiyel denkleme kesirli ksmi türevli diferansiyel denklem denir. Örne§in,
∂2u
∂x2
∂ 2.1 u
∂x2
+
2
+ ∂∂t2u = 0 diferansiyel denklemi bir ksmi türevli diferansiyel denklemdir.
∂2u
∂t2
=0
ise kesirli ksmi türevli diferansiyel denklemdir.
Ksmi türevli diferansiyel denklemlerin çözümü denince, bu denklemi sa§layan
z = f (x, y, ..., u)
³eklinde bir fonksiyonun bulunmas dü³ünülebilir. Bu fonksiyon
3
z = f (x1 , x2 , ..., xn )
ba§msz de§i³ken saysna ba§l olarak
gibi
n
de§i³kenli bir
fonksiyon olarak dü³ünülebilir. Fiziksel uygulamalarn pek ço§unda iki de§i³kenli
z = f (x, y)
³eklindeki fonksiyonlarla kar³la³lr.
diferansiyel denklemin analitik çözümü
n
n.
mertebeden bir ksmi türevli
tane key fonksiyon içerir. E§er bu
denklemin saysal çözümü aranyor ise, integral yüzeyi üzerindeki noktalar bulunmaya çal³lr.
Ksmi türevli diferansiyel denklemlerin uygulamal ksmnda ba³lca odak nokta
ikinci ve yüksek mertebeden lineer ksmi türevli diferansiyel denklemler üzerinde
olmasna ra§men, birinci dereceden ksmi türevli diferansiyel denklemler s§ su
dalgalar çal³mas, trak ak³, gaz dinami§i, kimya mühendisli§inde izotermik
ak³ reaktörleri, s e³anjörlerinin termal verimlilik analizi gibi bir çok mühendislik uygulamalarnda ortaya çkar. kinci mertebeden ksmi türevli diferansiyel
denklemlere ak³kanlar mekani§i, gözenekli ortamdaki ak³, katlarda s iletimi,
kimyasallarn difüzyonu, dalga yaylm gibi mühendisli§in ve matematiksel zi§in önemli alanlarnda kar³la³lr. Yüksek mertebeden ksmi türevli diferansiyel
denklemlerin uygulama alanlar ise genellikle katlarn mekani§idir. Bu çal³mada
ikinci mertebeden ksmi türevli diferansiyel denklemlerin üzerinde durulacaktr.
2.2
kinci Mertebeden Ksmi Türevli Diferansiyel
Denklemler
A(x, y)
∂2u
∂2u
∂u ∂u
∂2u
+
B(x,
y)
+
C(x,
y)
+ f (x, y, u, , ) = 0
2
2
∂x
∂x∂y
∂y
∂x ∂y
(2.1)
denklemine ikinci mertebeden ksmi türevli diferansiyel denklem denir. Burada
A, B, C
katsaylar ba§msz
(x, y) de§i³kenine ba§l fonksiyonlardr. Türev terim-
lerinin derecesi 1 ise (2.1) denklemi lineerdir denir.
f
lineer de§ilse (2.1) denk-
lemine quasi-lineerdir denir. (2.1) denklemindeki türevlerden en az birinin mertebesi kesirli ise bu diferansiyel denkleme ikinci mertebeden kesirli ksmi türevli
diferansiyel denklem denir.
(2.1) denkleminin karakteri
A, B, C
katsaylarna ba§ldr.
4
1.
2.
3.
B 2 − 4AC < 0
B 2 − 4AC = 0
B 2 − 4AC > 0
ise (2.1) denklemine Eliptik Denklem
ise (2.1) denklemine Parabolik Denklem
ise (2.1) denklemine Hiperbolik Denklem
denir.
2.2.1
Eliptik Denklemler
Genel olarak eliptik denklemlerle denge problemlerinin sonuçlar olarak kar³la³lr. Bu tür denklemlerin en tipik örnekleri
∇2 u = f (x, y) →
∇2 u = 0 →
∂2u ∂2u
+
= f (x, y)
∂x2 ∂y 2
∂2u ∂2u
+
=0
∂x2 ∂y 2
Poisson Denklemi
Laplace Denklemi
dir.
Genel olarak, ziksel sistemleri karakterize eden ksmi türevli diferansiyel
denklemlerin sonsuz sayda çözümleri olabilir. Bir ziksel problemin çözümünü
temsil eden tek bir fonksiyonun bulunabilmesi için yardmc ko³ullar gereklidir. Bu yardmc ko³ullar ba³langç ko³ullar(initial conditions) ve snr ko³ullardr(boundary conditions).
R
iki boyutlu uzayda bir bölge ve
∂R,
kapal
R
bölgesinin snr olsun. Bu tür ksmi türevli diferansiyel denklemlerdeki snr ko³ullarna üç farkl tipte kar³la³labilir:
i. Dirichlet Snr Ko³ulu. Bu tür eliptik denklemlerde snr veya di§er ko³ullar
genellikle fonksiyonun kendisi olarak verilir.
u(x, y) = φ(x, y);
(x, y) ∈ ∂R
ii. Neumann Snr Ko³ulu. Bu tür denklemlerde ko³ullar
u
fonksiyonunun
türevleri olarak verilmi³tir.
∂u
= g(x, y);
∂n
(x, y) ∈ ∂R,
5
(
∂
normal
∂n
boyunca türev
)
iii. Kar³k veya Robin Snr Ko³ulu. Bu tür denklemlerde ko³ullar
u
fonk-
siyonunun kendisi ve türevleri cinsinden verilir.
αu + β
2.2.2
∂u
= γ;
∂x
(x, y) ∈ ∂R,
α, β > 0
Parabolik Denklemler
Genelde s ya da yaylma problemleri parabolik ksmi türevli diferansiyel denklemleri olu³turur.
∂u
∂2u
= 2
∂t
∂x
Is veya Difüzyon Denklemi
Bu tür diferansiyel denklemlerde genel olarak herhangi bir ba§msz de§i³kenin
herhangi bir durumunda ba³langç ko³ullar ve snr ko³ullar çe³itli ³ekillerde
verilebilir. Dolaysyla çözüm daima açk sonlu bir bölgede ara³trlr. Bölge kapal
de§ildir. Örne§in yukardaki difüzyon denklemi için snr ko³ullar
u(0, t) = u(x, t) = 0,
t>0
ve ba³langç ko³ulu da
u(x, 0) = g(x),
dir. Yukardaki difüzyon denkleminde
0≤x≤X
∂u
türevi kesirli türevli ise bu difüzyon
∂t
denklemine time-fractional difüzyon denklemi,
∂2u
türevi kesirli türevli ise bu
∂x2
difüzyon denklemine space-fractional difüzyon denklemi denir. Her ikisi de kesirli
ise space-time fractional difüzyon denklemi denir.
2.2.3
Hiperbolik Denklemler
Genelde dalga denklemi hiperbolik ksmi türevli diferansiyel denklemleri olu³turur.
2
∂2u
2∂ u
=
c
,
∂t2
∂x2
c(yaylma
)
hz
Tek Boyutlu Dalga Denklemi
Bu tür diferansiyel denklemlerde snr ko³ullar genelde fonksiyon veya türevlerin
lineer kombinasyonlar olarak verilebilir, ba³langç ko³ullar da fonksiyonun bir
6
de§eri ya da türevi olarak verilebilir. Örne§in yukardaki dalga denklemi için
snr ko³ullar
u(0, t) = u(x, t) = 0,
t>0
ve ba³langç ko³ullar da
u(x, 0) = f (x),
dir. Yukardaki dalga denkleminde
ut (x, 0) = g(x) 0 ≤ x ≤ X
∂2u
türevi kesirli türevli ise bu difüzyon denk∂t2
lemine time-fractional dalga denklemi,
∂2u
türevi kesirli türevli ise bu dalga denk∂x2
lemine space-fractional dalga denklemi denir. Her ikisi de kesirli ise space-time
fractional dalga denklemi denir.
Bu üç türdeki kesirli ksmi türevli diferansiyel denklemlerde katsaylar basit formda olmayabilir. Dolaysyla analitik çözümleri kolay de§ildir. Bu yüzden
saysal çözüm yöntemlerinden faydalanlarak yakla³k çözümlerini bulma yoluna
gidilir. Burada da kesirli türevi a³ma problemi ortaya çkar. Bunun için matematikçiler kesirli türevler yerine yazlabilecek fonksiyonlar geli³tirmi³lerdir. imdi bu
fonksiyonlar ele alalm:
2.3
Bir
Grünwald-Letnikov Kesirli Türevi
y = f (x)
sürekli fonksiyonunu ele alnsn. Bu fonksiyonun birinci türevi
0
f (x) =
f (x) − f (x − h)
df
= lim
dx h→0
h
(2.2)
³eklinde tanmlanr. Benzer ³ekilde 2. ve 3. türevleri de
0
0
f (x) − 2f (x − h) + f (x − 2h)
f (x) − f (x − h)
= lim
f (x) = lim
h→0
h→0
h
h2
00
000
f (x) = lim
h→0
f (x) − 3f (x − h) + 3f (x − 2h) − f (x − 3h)
h3
(2.3)
(2.4)
³eklindedir. Matematiksel indüksiyonla
f
(n)
1
(x) = lim n
h→0 h
n
X
!
(−1)
r=0
r
(∆nh f )(x)
n
f (x − rh) = lim
h→0
hn
r
7
(2.5)
e³itli§i elde edilir ki burada
n
binom katsaylardr. Bu tam sayl türev formülleri
r
kesirli türevlere geni³letilsin, yani
yerine
(∆ph f )(x)
(x Dap f )(x)
n∈N
yerine
p ∈ R+ , hn
yerine
hp , (∆nh f )(x)
yazlsn. Bu durumda Grünwald-Letnikov kesirli türevi,
1
= lim p
h→0 h
n
X
!
(−1)
m
X
f (k) (a)(x − a)−p+k
p
f (x − rh) =
Γ(−p + k + 1)
r
k=0
r
r=0
(2.6)
Z x
1
(x − t)m−p f (m+1) (t)dt (m < p < m + 1, nh = x − a)
+
Γ(m − p + 1) a
³eklinde elde edilir ki burada
(p)
fh (t)
n
X
−p
=h
!
(−1)
r
r=0
dir[21, 22]. Bununla birlikte burada
Γ(α),
Z ∞
Γ(α) =
0
Γ(α + 1) = αΓ(α),
p
f (x − rh)
r
(2.7)
Gamma fonksiyonudur ve
tα−1 e−t dt
(2.8)
α ∈ N ⇒ Γ(α + 1) = α!
³eklinde tanmlanm³tr.
spat.
−p
lim h
h→0
n
X
!
(−1)
r
r=0
p
f (x − rh)
r
(2.9)
limitinin hesaplanmas için öncelikle binom katsaylarnn
!
!
p
p−1
p−1
=
+
r
r
r−1
!
(2.10)
özelli§i kullanlsn. Bu e³itlik (2.7) da yerine konursa
(p)
fh (t)
−p
= h
= h−p
n
X
!
(−1)
r=0
n
X
r
!
n
X
p−1
p−1
f (x − rh) + h−p (−1)r
f (x − rh)
r
r−1
r=1
!
(−1)r
r=0
!
n−1
X
p−1
p−1
(−1)r+1
f (x − rh) + h−p
f (x − (r + 1)h)
r
r
r=0
!
−p
= h (−1)
n
!
n−1
X
p−1
p−1
−p
f (a) + h
∆f (x − rh)
(−1)r+1
n
r
r=0
elde edilir ki burada
∆f (x − rh) = f (x − rh) − f (x − (r + 1)h)
8
(2.11)
m
dr. (2.11) den ba³lanarak (2.10) özelli§i
kez tekrarlanrsa
!
(p)
fh (t)
= (−1)
−p
+ h
n
n−2
X
!
p − 1 −p
p − 2 −p
h f (a) + (−1)n−1
h ∆f (a + h)
n
n−1
!
(−1)
r
r=0
!
p−2 2
∆ f (x − rh)
r
!
p − 1 −p
p − 2 −p
= (−1)n
h f (a) + (−1)n−1
h ∆f (a + h)
n
n−1
!
n−2 p − 3
h−p ∆2 f (a + 2h)
+ (−1)
n−2
−p
+ h
!
n−3
X
(−1)
r
r=0
p−3 3
∆ f (x − rh)
r
= ...
=
m
X
!
(−1)
p − k − 1 −p k
h ∆ f (a + kh)
n−k
n−k
k=0
−p
+ h
(2.12)
n−m−1
X
!
(−1)
r
r=0
p − m − 1 m+1
∆
f (x − rh).
r
(2.13)
elde edilir. imdi ilk olarak (2.13) deki ilk toplamn k. teriminin limiti alnsn:
!
p − k − 1 −p k
lim (−1)
h ∆ f (a + kh)
h→0
n−k
!
n−k p − k − 1
(n − k)p−k
= lim (−1)
h→0
n−k
p−k
∆k f (a + kh)
n
×
(nh)−p+k
n−k
hk
!
p
−
k
−
1
= (t − a)−p+k lim (−1)n−k
(n − k)p−k
n→∞
n−k
p−k
n
∆k f (a + kh)
× lim
× lim
n→∞ n − k
n→∞
hk
f (k) (a)(t − a)−p+k
=
Γ(−p + k + 1)
n−k
elde edilir çünkü
!
p−k−1
lim (−1)
(n − k)p−k
n→∞
n−k
1
(−p + k + 1)(−p + k + 2)...(−p + n)
=
,
= lim
−p+k
n→∞
(n − k)
(n − k)!
Γ(−p + k + 1)
n−k
lim
n→∞
n
n−k
9
p−k
=1
(2.14)
ve
∆k f (a + kh)
= f (k) (a)
n→∞
hk
lim
dr. Dolaysyla
m
X
!
(−1)
k=0
n−k
m
X
f (k) (a)(t − a)−p+k
p − k − 1 −p k
h ∆ f (a + kh) =
n−k
Γ(−p + k + 1)
k=0
(2.15)
dir. imdi (2.13) deki ikinci toplamn limitini bulalm. A³a§daki teorem kullanlarak söz konusu limit kolayca bulunabilir:
Teorem 2.3.1. Bir
βk (k = 1, 2, ...)
dizisi alnsn ve
lim βk = 1,
k→∞
lim αn,k = 0 (∀k),
n→∞
lim
n→∞
n
X
αn,k = A
(∀k),
k=1
n
X
k=1
|αn,k | < K
(∀n)
oldu§u varsaylsn. Bu durumda
lim
n→∞
n
X
αn,k βk = A
k=1
dr.
spat.[45].
(2.13) deki söz konusu ifade
!
n−m−1
X
1
p − m − 1 −m+p
r
(−1)r Γ(−p + k + 1)
r
Γ(−p + k + 1) r=0
∆m+1 f (x − rh)
×h(rh)m−p
hm+1
³eklinde yazlsn. Teorem (2.3.1) in kullanlmas için
!
p − m − 1 −m+p
βr = (−1)r Γ(−p + k + 1)
r
,
r
αn,r = h(rh)m−p
∆m+1 f (x − rh)
,
hm+1
10
h=
x−a
n
(2.16)
alnsn. Bu durumda
!
p − m − 1 −m+p
lim βr = lim (−1) Γ(−p + k + 1)
r
=1
r→∞
r→∞
r
r
dir. Bununla birlikte, e§er
lim
n→∞
n−m−1
X
m − p > −1
h→0
r=0
=
Z x
ise,
n−m−1
X
αn,r = lim
(2.17)
h(rh)m−p
r=0
∆m+1 f (x − rh)
hm+1
a(x − τ )m−p f (m+1) (τ )dτ
(2.18)
dur. Buradan (2.17) ve (2.18) ile birlikte teorem (2.3.1) uyguland§nda
lim h
−p
h→0
!
n−m−1
X
(−1)
r
r=0
=
p − m − 1 m+1
∆
f (x − rh)
r
Z x
1
a(x − τ )m−p f (m+1) (τ )dτ
Γ(−p + k + 1)
(2.19)
elde edilir. Sonuç olarak (2.14) ve (2.19) dan
(a Dxp f )(x) =
(p)
lim fh (x)
h→∞
m
(k)
X
f
(a)(x − a)−p+k
=
Γ(−p + k + 1)
k=0
Z x
1
(x − t)m−p f (m+1) (τ )dτ
+
Γ(m − p + 1) a
(2.20)
elde edilmi³ olur.
2.4
Riemann-Liouville Kesirli Türevi
Bir kesirli-mertebeli geriye farkn bir limiti olarak tanmlanan (2.20) GrünwaldLetnikov kesirli türevi integralli bir terim barndrd§ için iyi gibi görünse de
ayn zamanda integralli olmayan bir terim barndrd§ için çok kullan³l de§ildir.
Bunun üzerine
(a Dpx f )(x)
(m = [p] + 1, x > a)
1
=
Γ(m − p)
d
dx
m Z
x
a
(x − t)m−p−1 f (τ )dτ
(2.21)
³eklinde özel bir integro-diferansiyel tanmlanm³tr ki bu
ifadeye Riemann-Liouville kesirli türevi denir[19, 20].
f (x)
in
m
kez sürekli di-
feransiyellenebilir olmas varsaym altnda Grünwald-Letnikov kesirli türevinden
11
elde edilen (2.20) ifadesi, ayn varsaym altnda üst üste ksmi integrasyon uygulanp diferansiyeli alnarak (2.21) den de elde edilebilir. Dolaysyla
(a Dpx f )(x)
=
=
+
=
dir, yani
1
d mZ x
(x − t)m−p−1 f (τ )dτ
a
Γ(m − p) dx
m
X
f (k) (a)(x − a)−p+k
Γ(−p + k + 1)
k=0
Z x
1
(x − t)m−p f (m) (τ )dτ
Γ(m − p + 1) a
(a Dxp f )(x), (m − 1 ≤ p < m)
x ≥ 0 için m sürekli türeve
sahip
(2.22)
f (x) fonksiyonlarnn bir snf ele aln-
d§nda (2.20) Grünwald-Letnikov kesirli türevi (2.21) Riemann-Liouville kesirli
türevine denktir. E§er
0<p<1
(x Dap f )(x) =
ise bu durumda
d Z x f (t)dt
1
Γ(1 − p) dx a (x − t)p
(x > a)
(2.23)
olur.
2.5
Caputo Kesirli Türevi
(2.21) Riemann-Liouville kesirli diferansiyeli, kesirli türevler ve integrallerin geli³iminde ve onlarn pür matematikteki uygulamalarnda önemli bir rol oynam³tr. Buna ra§men, bu türevler modern teknolojinin beklentilerini kar³layamam³tr. Uygulamal problemler ziksel olarak yorumlanabilecek
f (a), f 0 (a),
vb gibi
ba³langç ko³ullar kullanlabilen kesirli türevlere gerek duymaktadr. RiemannLiouville yakla³m Riemann-Lioville kesirli türevlerinin
f )(x) = b1
(a Dα−1
x
(a Dα−2
f )(x) = b2
x
(2.24)
...
f )(x) = bn
(a Dα−n
x
(bk = sabit,
k = 1, 2, ..., n) gibi x = a alt snrndaki limit de§erlerini içeren ba³-
langç ko³ullar do§urmaktadr. Bu tür ba³langç ko³ullara sahip ba³langç de§er
problemleri matematiksel olarak ba³aryla çözülse de, çözümleri pratikte kullan³l de§ildir, çünkü bu tür ba³langç ko³ullar için bilinen ziksel bir anlam ya
12
da yorum yoktur. Burada, bilinen matematiksel teori ile uygulamal teorinin ihtiyaçlar arasnda bir çeli³ki gözlemlenmektedir. Bu çeli³kinin mutlak bir çözümü
M. Caputo tarafndan ilk olarak makalesinde [23, 24] ve iki yl sonra kitabnda
[25] verildi. Son olarak da El-Sayed tarafndan da bir çözüm verilmi³tir [26-31].
Caputo'nun tanm ³u ³ekilde idi:
y,
sonlu
(a, x)
fonksiyon ve
aral§nda sürekli, integre edilebilir,
α∈R
α
(C
x Da f )(x)
türevine
α.
olsun.
α>0
n
kez diferansiyellenebilir bir
ise
Z x
f (n) (t)dt
1
=
Γ(n − α) a (x − t)α−n+1
(n = [α] + 1, x > a)
mertebeden Caputo kesirli türevi denir. Özel olarak
(2.25)
0 < α < 1
ise
Caputo kesirli türevi,
α
(C
x Da f )(x) =
³eklinde olur.
α=n∈N
Z x (n)
f (t)dt
1
Γ(1 − α) a (x − t)α
ise, bu durumda
(x > a)
(2.26)
(C Dan f )(x) = f (n) (x)
ve özel olarak
n = 0 için (C Da0 f )(x) = f (x) tir. R+ üst yar ekseni üzerinde Caputo kesirli türevi
α
(C
x D0 f )(x)
dir.
α → n
Z x
f (n) (t)dt
1
=
Γ(n − α) 0 (x − t)α−n+1
için Caputo kesirli türevi
0 ≤ n−1 ≤ α ≤ n
ve
[a, X]
f (x)
te her bir
(n = [α] + 1, x > a)
in klasik
X >a
için
n.
(2.27)
türevi olur. Gerçekten,
f (x)
in
n+1
sürekli snrl
türeve sahip oldu§unu varsayalm. Bu durumda,
f (n) (a)(x − a)n−α
Γ(n − α + 1)
Z x
1
(x − τ )n−α f (n+1) (τ )dτ )
+
Γ(n − α + 1) a
lim (C D0α f )(x) = α→n
lim (
α→n x
= f (n) (a) +
Z x
a
f (n+1) (τ )dτ = f (n) (x),
n = 1, 2, ...
tir. Bu ise Grünwald-Letnikov ve Riemann-Liouville yakla³mlarna benzer olarak
Caputo yakla³mnn da tamsay mertebeli türevler arasndaki bir interpolasyonu
sa§lad§n gösterir. Caputo yakla³mnn en büyük avantaj Caputo türevli kesirli diferansiyel denklemlerin ba³langç ko³ullarnn tamsay mertebeli diferansiyel denklemlerinki ile ayn olmasdr, yani
x=a
alt snrnda bilinmeyen fonksi-
yonlarn tamsay mertebeli türevlerinin limit de§erlerlerini içermesidir.
13
Riemann-Liouville ile Caputo türevlerinin ba³langç ko³ullar arasndaki fark görebilmek için bu türevlere
a = 0
da Laplace transformunu uygulayalm. Buna
göre Riemann-Liouville kesirli türevinin Laplace transform formülü
Z ∞
0
e−px (0 Dαx f (x))dx = pα F (p) −
n−1
X
k=0
(2.28)
pk (0 Dα−k−1
f (x))|t=0 , (n − 1 ≤ α < n)
x
dir. Buna kar³lk Caputo kesirli türevinin Laplace transform formülü ise
Z ∞
0
e−px (0 Dαx f (x))dx = pα F (p) −
n−1
X
pα−k−1 f (k) (0),
k=0
(n − 1 ≤ α < n)
(2.29)
dir. Buradan görülüyor ki Riemann-Liouville kesirli türevinin Laplace transformu
(2.24) tipinde ba³langç ko³ullarnn kullanmna müsaade ediyor ki bu ise onlarn
ziksel yorumlanma problemini do§uruyor. Tersine Caputo kesirli türevinin Laplace transformu ise, ziksel yorumlar bilinen klasik tamsay mertebeli türevlerin
ba³langç de§erlerinin kullanmn sa§lyor.
2.6
Erdelyi-Kober Kesirli Türevi
f,
(a, x)
sonlu
fonksiyon,
aral§nda sürekli, integre edilebilir,
α, η, σ ∈ R
α
(x Da;σ,η
f )(x)
türevine
α.
α, σ > 0
ve
−ση
=x
n
kez diferansiyellenebilir bir
olsun. Bu durumda,
1 d
σxσ−1 dx
n
n−α
xσ(n+η) Ia;σ,η+α
f (x) (n = [α] + 1) (2.30)
mertebeden Erdelyi-Kober kesirli türevi denir [32]. Burada
n−α
Ia;σ,η+α
f
σx−σ(n+η)
(x) =
Γ(n − α)
Z x
a
xσ(η+α+1)−1 f (t)dt
(xσ − tσ )α−n+1
(n = [α] + 1)
(2.31)
dir. Bu tanmlar ve sonuçlar Samko [35], Kiryakova [83] ve McBride [84] tarafndan verilmi³tir.
σ = 2, a = 0
oldu§unda (2.30) ba§nts
α
(x D0;2,η
f )(x)
haline gelir. E§er
−2η
=x
α=n∈N
n
(x Da;σ,η
f )(x)
1 d
2x dx
n
x2(n+η) Iη+α,n−α f (x)
(2.32)
oldu§u varsaym altnda (2.30) ba§nts
−ση
=x
1 d
σxσ−1 dx
³ekline gelir.
14
n
xσ(n+η) f (x)
(2.33)
2.7
Riesz Kesirli Türevi(Potansiyeli)
f,
(a, b)
sonlu
α∈R
fonksiyon ve
α
(R(a,b)
f )(x)
türevine
2.8
f,
sonlu
α.
aral§nda sürekli, integre edilebilir,
=
m
kez diferansiyellenebilir bir
olsun. Bu durumda
Z b
−1
2Γ(m − α)cos( (m−α)π
)
2
a
f (m) (t)dt
,
(x − t)α−m+1
α ∈ (m − 1, m) (2.34)
mertebeden Riesz kesirli türevi(potansiyeli) denir [33].
Hadamard Kesirli Türevi
(a, b)
aral§nda sürekli, integre edilebilir,
α∈R
fonksiyon ve
α.
türevine
kez diferansiyellenebilir bir
olsun. Buna göre
(x Daα f )(x)
n
d
= x
dx
n
Z x
1
x n−α+1 f (t)dt
log
,
Γ(n − α) a
t
t
α ∈ (n − 1, n)(2.35)
mertebeden Hadamard kesirli türevi denir [34]. Bu türevlerle ilgili
tanm ve sonuçlar Samko [35], Butzer [85, 86, 87], Kilbas [88] ve Titura [89]
tarafndan verilmi³tir.
2.9
Marchaud Kesirli Türevi
f , (0, ∞)
aral§nda sürekli, integre edilebilir bir fonksiyon ve
0<α<m
olsun.
Buna göre
(D f )(x) =
türevine
α.
Z ∞
1
α
Cα,m
0
∆m
t f (x)dt
t1+α
(2.36)
mertebeden Marchaud kesirli türevi denir.
Burada
∆m
t f (x)
=
m
X
!
(−1)
j
j=0
m
f (x − jt),
j
(2.37)
ve
Z ∞
Cα,m =
0
!
m
X
(1 − e−t )m dt
m α
j
(−1)j
=
Γ(−α)
1+α
t
j
j=1
dr.
15
(2.38)
Bu kesirli türev tanmlarndan en yaygn olarak Riemann-Liouville ve Caputo'nun
tanmlad§ kesirli türevler kullanlmaktadr. Bu çal³mada da Caputo kesirli türevi kullanlm³tr.
16
Bölüm 3
SAYISAL YÖNTEMLER
Bir önceki bölümde kesirli ksmi türevli diferansiyel denklemlerin saysal olarak
çözülebilece§i söylenmi³ti. Bu denklemlerin saysal olarak çözülmesinde kullanlan
baz metodlar a³a§da verilmi³tir:
3.1
Spline(Ara Enterpolasyon) Fonksiyonlar ve Metodu
Spline fonksiyonlarnn ilk kullanm önceki yüzyln ba³larna dayanr. Parçal
lineer fonksiyonlar ba³langç de§er problemlerinin çözümünde Peanonun varlk
ispatyla ba§lantl olarak kullanlm³t, ancak o zamanlar bu fonksiyonlara spline
fonksiyonlar denmezdi. Spline fonksiyonlar kavram ilk olarak Schoenberg, Sard
ve di§erlerinin çal³malaryla ortaya çkm³tr [129]. Spline fonksiyonu kabaca,
belli ko³ullar altnda kendisi ve türevleri sürekli olan bir parçal fonksiyondur.
Bu fonksiyonun yakla³trma, enterpolasyon ve e§ri uydurulmas gibi uygulamalarda çok ba³arldr [130-133]. Bundan dolay bu tür problemlerin çözümünde
en iyi yakla³trma fonksiyonunun spline fonksiyon oldu§u kabul edilmi³tir. Daha
sonralar da hem pratik hem de teorik çal³malarda spline fonksiyonlar önemli ölçüde ilgi haline gelmi³tir. De Boor [134-136], Ahlberg [130], Loscalzo and Talbot
[137,138], Bickley [139], Fyfe [140,141], Albasiny ve Hoskins [142], Sakai [143145], Russell ve Shampine [146], Micula [132,147], Rubin ve Khosla [148], Rubin
ve Graves [149], Daniel ve Swartz [150], Archer [151], Patricio [152,153], Tewarson
[154,155], Usmani [156-158], Jain ve Aziz [159,161], Surla [162-165], Iyengar ve
17
Jain [166], Chawla ve Subramanian [167-169], Irodotou-Ellina ve Houstis [170],
Rashidinia [36], Fairweather ve Meade [171] gibi bir çok ara³trmac diferansiyel
denklemlerin çözümünde polinom ve polinom olmayan spline metodlarn kullanm³tr. Kübik spline metodu ilk olarak Bickley tarafndan iki noktal lineer snr
de§er problemlerinin çözümünde kullanlm³tr [139]. Bickley, söz konusu problemler için bir diskritizasyon denklemi olarak süreklilik ko³ulunu kullanm³tr.
Daha sonra Fyfe da Bickley'in önerdi§i metodu lineer snr de§er problemlerini
ele alm³tr[140].
Spline fonksiyonlar belirli süreklilik ko³ullar ile birbirine ba§lanan aralklarda
tanmlanm³ polinom tipli fonksiyonlardr.
x0 , x1 , ..., xn
ko³ulunu sa§layacak ³ekilde dü§üm noktas denen
k≥0
gibi bir
k
n+1
Görüldü§ü üzere
[xi−1 , xi ]
[x0 , xn ]
aral§nda
S
¦
S
her bir
x , x , ..., xn
fonksiyonu span
aral§nda
(k − 1).
k.
1, x, x2 , ..., xk
(i = 0, 1, ..., n − 1) (3.1)
©
S
biçimindedir.
fonksiyonu,
ya da daha küçük dereceden bir polinom ise ve
dü§üm noktalarna sahip
k
k.
olabilen
dereceden spline fonksiyon denir, yani
(k − 1).
olan sürekli, parçal bir fonksiyondur. Örne§in
1.
nokta belirlenmi³ olsun.
dereceden sürekli türevlere sahipse bu fonksiyona
fonksiyonu derecesi en fazla
sabitlerdir,
x0 < x1 < ... < xn
says alnsn.
S(x) = ai + bi (x − xi ) + ci (x − xi )2 + ... + di (x − xi )k
PSfrag replacements
0
1
gibi
dereceye kadar sürekli türevleri
0.
dereceden spline fonksiyonlar
dereceden spline fonksiyonlar lineer fonksiyonlardr.
Sn−3
S0
x0
Sn−2
x1
x2
xn−2
x3
Sn−1
xn−1
xn
S1
S2
ekil 3.1: 1. dereceden spline fonksiyonu
Polinom ³eklindeki spline fonksiyonlar içinde en çok kullanlan kübik sp-
18
line fonksiyonlardr. Kübik spline fonksiyonlar (3.1) deki
span
k = 3
halidir, yani
{1, x, x2 , x3 } biçimindedir. Spline fonksiyonlar yukarda oldu§u gibi polinom
olmakla birlikte polinom olmayabilir de. Biz de çal³mamzda span
{1, x, cos kx, sin kx}
biçimindeki non-polynomial kübik spline fonksiyonlarn kullanaca§z. Burada
k
parametresi, metodun do§rulu§unu artrmak için kullanlan frekanstr. imdi ksaca non-polynomial kübik spline fonksiyonlarn ve metodunu inceleyelim:
PSfrag replacements
3.2
Non-polynomial Kübik Spline Fonksiyonu ve
Metodu
n,
key bir pozitif tam say olmak üzere,
[a, b]
0, 1, 2, ..., n, a = x0 , xn = b, h = (b − a)/n)
aral§n
xi = a + ih, (i =
grid noktalarn kullanarak
n
e³it
alt aral§a bölelim.
u(x)
analitik çözüm olsun ve
non-polynomial kübik
noktas olsun.
Si (x)
Si (x), xi
ve
ve
(xi+1 , ui+1)
fonksiyonundan elde edilen
xi+1
dr ve buna ek olarak ortak
ui , (xi , ui )
noktalarndan geçen
u(xi )
nin bir yakla³k
noktalarnda enterpolasyon ko³ullarn sa§lamal-
(xi , ui )
noktalarnda birinci türevi sürekli olmaldr.
Si (x),
Si (x) = ai + bi (x − xi ) + ci sinτ (x − xi ) + di cosτ (x − xi ),
³eklinde yazlr. Burada
S1
ai , bi , ci
ve
di
sabitler ve
τ
(i = 0, 1, ..., n − 1)(3.2)
key bir parametredir.
S2
Sn−3
S0
x0
Sn−2
x1
x2
xn−2
x3
ekil 3.2: Non-polynomial kübik spline fonksiyonlar
19
Sn−1
xn
Si (xi ) = ui ,
Si (xi+1 ) = ui+1 ,
e³itlikleri kullanlarak bu sabitler
00
00
S (xi ) = Mi ,
ui , ui+1 , Mi
ve
S (xi+1 ) = Mi+1 .
Mi+1
(3.3)
cinsinden bulunabilir:
Si (xi ) = ai + di = ui
(3.4)
Si (xi+1 ) = ai + bi h + ci sin θ + di cos θ = ui+1
(3.5)
Si0 (x) = bi + τ ci cos τ (x − xi ) − τ di sin τ (x − xi )
(3.6)
Si00 (x) = −τ 2 ci sin τ (x − xi ) − τ 2 di cos τ (x − xi )
(3.7)
Si00 (xi ) = −τ 2 di = Mi ⇒ di = −
Mi
τ2
(3.8)
Si00 (xi+1 ) = −τ 2 (ci sin θ − di cos θ) = Mi+1
(3.9)
(3.8), (3.4) ve (3.9) da yerine konursa
ai = ui +
ci =
Mi
τ2
(3.10)
Mi cosθ − Mi+1
τ 2 sinθ
(3.11)
elde edilir. (3.10) ve (3.11), (3.5) te yerine konursa
bi =
e³itli§i elde edilir.
ui+1 − ui Mi+1 − Mi
+
,
h
τθ
(xi , ui )
(θ = τ h)
(3.12)
0
noktasnda birinci türevin süreklili§i, yani
Si−1 (xi ) =
0
Si (xi ) ,(i = 1, ..., n − 1)
e³itli§i kullanlarak
αMi+1 + 2βMi + αMi−1 = (1/h2 )(ui+1 − 2ui + ui−1 )
ba§nts elde edilir. Burada,
ve
θ = τh
(3.13)
α = (−1/θ2 + 1/θ sin θ), β = (1/θ2 − cos θ/θ sin θ)
dr [36].
20
3.3
B-Spline Metodu
Isaac Jacob Schoenberg tarafndan bulunmu³tur ve splinelarn baz fonksiyonlar
olarak kullanlmasndan dolay (basis spline) n ksaltlm³ olarak B-spline denmi³tir. Enterpolasyon teorisi, özellikle kimyasal reaktör teori, aerodinamik, kuantum mekani§i, optimal kontrol, difüzyon i³lemi ve geozik gibi mühendisli§in bir
çok alannda çok öneme sahiptir. Bu teoride B-spline n kullanlma nedenleri:
i. Karma³k bir fonksiyonu daha basit bir polinomun lineer kombinasyonuna dönü³türebilir.
ii. Polinom enterpolasyonu, türevinin kolay alnmas ve köklerinin kolay bulunabilmesinden dolay pratikte kullanlan metodlarn en iyilerinden biridir.
iii. B-spline polinomu, her bir parças, kolayca olu³turulabilen ve birbirlerine tek
tek düzgün bir ³ekilde ba§lanm³ dü³ük dereceli bir polinomdur.
iv. Snr ko³ullarnn kullanlmasndan dolay B-spline fonksiyonlar, yakla³m teorisinde çok aktif rol alrlar.
Belli bir tanm aral§ üzerinde tanmlanm³ key dereceden her spline fonksiyonu, ayn derece ve tanm aral§ üzerinde B-spline fonksiyonlarnn bir lineer
kombinasyonu olarak gösterilebilir [136]. Ayn zamanda söz konusu bu e§riler,
spline yakla³m ile tutarldr yani dü§üm noktalarnda dereseninden daha küçük
mertebeden türevleri süreklidir.
[a, b] ⊂ R
sonlu bir aralk ve
Ωn = {x0 , x1 , ..., xn }, [a, b]
{x0 , x1 , ..., xn }
nin bir parçalan³ olsun.
den bir B-spline olsun. Bu durumda;
i. SuppBk,i
ii.
= [xi , xi+k+1 ]
Bk,i (x) ≥ 0,
iii.
P∞
−∞
∀x ∈ R
Bk,i (x) = 1,
ler dü§üm noktalar olmak üzere
∀x ∈ R
21
Bk,i (x), (i ∈ Z) k .
mertebe-
dir [136, 128]. Örne§in 0. dereceden B-spline taban
8
>
>
<1,
x ∈ [xi , xi+1 ]
B0,i (x) = >
>
:0,
(3.14)
di§er durumlar
B0,i (x)
1
xi+1
xi
ekil 3.3:
³eklinde tanmlanm³tr.
k>0
B0,i (x)
taban
mertebeli B-spline tabanlar ise, de Boor tarafn-
dan tanmlanan a³a§daki de Boor rekürsiyon formülünden belirlenebilir:
Bk,i (x) =
x − xi
xi+k+1 − x
Bk−1,i (x) +
Bk−1,i+1 (x)
xi+k − xi
xi+k+1 − xi+1
(3.15)
B-spline tabanlarn yukardaki rekürsiyonu sa§lad§n ispatlayalm:
spat.
(t − x)k−1 = (t − x)(t − x)k−2
çarpmnn
kural;
f
(3.16)
k. bölünmü³ farknn bulunmas için Leibniz kural uygulansn. Leibniz
ve
g
iki fonksiyon olmak üzere
(f g)[x0 , x1 , ..., xn ] = f [x0 ]g[x0 , x1 , ..., xn ]+f [x0 , x1 ]g[x1 , x2 , ..., xn ]+...+f [x0 , x1 , ..., xn ]g[xn ]
³eklinde tanmlanm³ idi. Bu kural (3.16) ya uygulanrsa
(t − x)k−1 [xi , xi+1 , ..., xi+k ] = (t − x)(t − x)k−2 [xi , xi+1 , ..., xi+k ]
= (t − x)[xi ](t − x)k−2 [xi , xi+1 , ..., xi+k ]
+ (t − x)[xi , xi+1 ](t − x)k−2 [xi+1 , ..., xi+k ]
+ (t − x)[xi , xi+1 , xi+2 ](t − x)k−2 [xi+2 , ..., xi+k ]
+ ... + (t − x)[xi , ..., xi+k ](t − x)k−2 [xi+k ]
= (xi − x)(t − x)k−2 [xi , xi+1 , ..., xi+k ] + 1(t − x)k−2 [xi , xi+1 , ..., xi+k ](3.17)
22
olur, çünkü
(t − x)[xi ] = (xi − x)
(xi+1 − x) − (xi − x)
(t − x)[xi , xi+1 ] =
=1
xi+1 − xi
(t − x)[xi+1 , xi+2 ] − (t − x)[xi , xi+1 ]
(t − x)[xi , xi+1 , xi+2 ] =
xi+2 − xi
xi+2 −x−xi+1 +x
−x−xi +x
− xi+1xi+1
xi+2 −xi
−xi
=
=0
xi+2 − xi
ve dolaysyla
r >j+1
için
(t − x)[xi , ..., xi+r ] = 0
dr.
(xi − x)
([xi+1 , ..., xi+k ] − [xi , ..., xi+k−1 ])
xi+k − xi
(xi − x)[xi , ..., xi+k ] =
oldu§undan (3.17) e³itli§i
(x − xi )
(t − x)k−2 [xi , ..., xi+k−1 ]
xi+k − xi
(xi − x)
+
(t − x)k−2 [xi+1 , ..., xi+k ] + (t − x)k−2 [xi+1 , ..., xi+k ]
xi+k − xi
(x − xi )
=
(t − x)k−2 [xi , ..., xi+k−1 ]
xi+k − xi
(xi+k+1 − x)
+
(t − x)k−2 [xi+1 , ..., xi+k ]
xi+k+1 − xi
(t − x)k−1 [xi , ..., xi+k ] =
³eklinde de yazlabilir ki bu ise (3.15) tir.
Bu halde (3.14) den ve (3.15) rekürsiyonundan yüksek dereceden B-spline
tabanlar olu³turulabilir:
1.
dereceden B-spline taban
8
>
>
x−xi
>
,
>
x
−xi
i+1
>
<
xi+2 −x
B1,i (x) = >
xi+2 −xi+1
>
>
>
>
:
x ∈ [xi , xi+1 ]
, x ∈ [xi+1 , xi+2 ]
0,
³eklinde olur.
B2,i (x) =
2.
(3.18)
di§er durumlar
dereceden B-spline taban
1
2h2
8
>
>
>
(x − xi )2 ,
>
>
>
>
>
<h2 + 2h(x − xi+1 ) − 2(x − xi+1 )2 ,
>
>
>
(xi+3
>
>
>
>
>
:0,
2
− x) ,
x ∈ [xi , xi+1 ]
x ∈ [xi+1 , xi+2 ]
x ∈ [xi+2 , xi+3 ]
di§er durumlar
23
(3.19)
B1,i (x)
1
xi+2
xi+1
xi
ekil 3.4:
B1,i (x)
taban
B2,i (x)
1/2
xi+1
xi
xi+2
ekil 3.5:
dir. Son olarak
B3,i (x) =
1
6h3
3.
B2,i (x)
taban
dereceden B-spline taban ise
8
>
>
>
(x − xi )3 ,
>
>
>
>
>
>
h3 + 3h2 (x − xi+1 ) + 3h(x − xi+1 )2
>
>
<
3
xi+3
2
h + 3h (xi+3
>
>
>
>
>
>
(xi+3 − x)2 ,
>
>
>
>
>
:0,
x ∈ [xi , xi+1 ]
− 3(x − xi+1 )3 , x ∈ [xi+1 , xi+2 ]
− x) + 3h(xi+3 − x)2 − 3(xi+3 − x)3 , x ∈ [xi+2 , xi+3(3.20)
]
x ∈ [xi+3 , xi+4 ]
di§er durumlar
dir. Dolaysyla istenilen mertebeden tabanlara ba§l olarak bir spline fonksiyonu
s(x) =
n+2
X
Ci Bk,i
i=1
³eklinde tanmlanr. Burada
C
ler sabitlerdir.
24
B3,i (x)
2/3
1/6
xi+1
xi
xi+2
B3,i (x)
ekil 3.6:
3.4
xi+3
xi+4
taban
Sonlu Eleman(Galerkin) Metodu
Tanm 3.4.1. (Skaler Çarpm)
f (x)
g(x)
ve
iki reel de§erli fonksiyon olsun. Bu
fonksiyonlarn iç(skaler) çarpm
< f, g >=
Z b
a
f (x)g(x)dx
³eklinde tanmlanr. Bu tanmdan yola çkarak bir
kf k =
È
< f, f > =
Z b
a
f (x)
fonksiyonunun normu
1
2
|f (x)| dx
2
³eklinde tanmlanr.
E§er
< f, g >= 0
ise
f (x)
ve
g(x)
ortogonaldir denir.
Tanm 3.4.2. (Bir Vektör Uzaynn Baz)
bir fonksiyonlar kümesi olsun. Herhangi bir
V
bir vektör uzay ve
f (x) ∈ V
fonksiyonu,
S = {ϕi (x)}∞
i=0
ϕ
fonksiyonla-
rnn tek türlü belirli bir lineer kombinasyonu, yani
f (x) =
∞
X
ci ϕi (x)
i=0
olarak yazlabiliyorsa, lineer ba§msz
ϕi (x) (i = 0, .., ∞)
tör uzaynn bir baz denir.
25
fonksiyonlarna,
V
vek-
Örne§in
V
bütün polinomlarn kümesi ise
∞
S = {ϕi (x) = xi }i=0
kümesi
V
nin bir
bazdr.
Lemma 3.4.3.
f (x) ∈ V
olsun. Her
ϕi ∈ S
için
< f, ϕi >= 0
ise
f (x) ≡ 0
dr.
Tanm 3.4.4. (A§rlkl Rezidü Metodlar)
Bir a§rlkl rezidü metodu sonlu sayda
L[y(x)]
S = {ϕi (x)}ni=0
fonksiyonlarn kullanr.
bir lineer diferansiyel operatörü olmak üzere
L[y(x)] + f (x) = 0,
a≤x≤b
(3.21)
diferansiyel denklemini ele alalm. (3.21) diferansiyel denklemi herhangi bir
a§rlk fonksiyonu ile çarplp
Z b
a
[a, b]
w(x)
aral§nda integre edilirse
w(x) (L[y(x)] + f (x)) dx = 0
elde edilir. Burada (3.21) ve (3.22) denktir çünkü
(3.22)
w(x)
key bir fonksiyondur.
(3.21) diferansiyel denklemi için
u(x) = ϕ0 +
n
X
cj ϕj (x)
j=1
³eklinde bir çözüm tanmlayalm ve (3.21) te
y(x)
yerine
u(x)
yazalm. Bu du-
rumda rezidü
L[u(x)] + f (x) = 0
³eklinde tanmlanr. imdi amaç, seçilen
Z b
a
ko³ulunu sa§layacak
u(x)
w(x)
(3.23)
a§rlk fonksiyonuna göre
w(x) (L[u(x)] + f (x)) dx = 0
(3.24)
çözüm fonksiyonunu olu³turmaktr.
En önemli a§rlkl rezidü metotlarndan biri Rus Matematikçi Boris Grigoryevich
Galerkin(1871-1945) tarafndan olu³turulmu³tur. Galerkin, a§rlk fonksiyonlarn
özel olarak baz fonksiyonlar arasndan seçmi³ti, yani
w(x) ∈ {ϕi (x)}ni=1
idi. Bu
durumda beklenen ³ey
Z b
a
ϕi (x) (L[u(x)] + f (x)) dx = 0,
26
i = 1, 2, .., n
(3.25)
³eklindeki
n tane denklemin do§ru olmasdr. Bu metodun uygulanmas için yap-
lacak tek ³ey,
n
tane denklemin çözülerek
{ci (x)}ni=1
katsaylarnn bulunmasdr.
Problemlerimizde Galerkin metodunu ³u durumlar göz önüne alarak uygulayaca§z:
i.
ii.
Th : 0 = x0 < x1 < ... < xn < xn+1 = 1, (0, 1)
Vh0 = {v : v , Th
aral§nn bir parçalan³,
üzerinde sürekli ve parça parça lineer bir fonksiyon ve
v(0) = v(1) = 0},
iii.
ϕi , (i = 1, .., n), Vh
nn bir baz olsun. Bu baz
8
>
x−xi−1
>
>
,
>
hi
>
<
xi−1 ≤ x ≤ xi
ϕi (x) = > xi+1 −x , xi ≤ x ≤ xi+1
hi+1
>
>
>
>
:
0
,
(3.26)
di§er durumlar
³eklinde tanmlanan ³apka fonksiyonu(hat function)dur ve türevi de
0
8
>
>
1
>
,
>
h
i
>
<
ϕi (x) = >
−1
hi+1
>
>
>
>
:
xi−1 ≤ x ≤ xi
, xi ≤ x ≤ xi+1
0 ,
dir. Burada
di§er durumlar
hi = xi − xi−1 , hi+1 = xi+1 − xi
hi = hi+1 = h
dr ki çal³mamzda
xi
(3.27)
dir.
xi
aralklar birbirlerine e³itse
lerin e³it uzaklkl oldu§u varsaylacaktr.
φi (x)
φi+1 (x)
xi+1
xi+2
φi+2 (x)
1
xi
xi+3
ekil 3.7: apka fonksiyonlar
27
xi+4
Bölüm 4
SAYISAL ÖRNEKLER
4.1
Problem 1.
∂u(x, t)
∂ 1.8 u(x, t)
= d(x)
+ q(x, t)
∂t
∂x1.8
u(x, 0) = x3 , (0 ≤ x ≤ 1)
ba³langç ko³ulu ve
u(0, t) = 0, u(1, t) = e−t (t ≥ 0)
snr ko³ullar ile verilmi³ difüzyon denklemini ele alalm. Burada
difüzyon katsays,
denklemin
α=2
q(x, t) = −(1 + x)e−t x3
için analitik çözümü
(4.1)
d(x) =
Γ(2.2)x2.8
6
kaynak fonksiyonudur. Bu diferansiyel
u(x, t) = e−t x3
tür.
Kesirli difüzyon denklemleri, son yllarda mühendislik ve bir çok ziksel ve
kimyasal süreçleri modelleme alanlarnda ilgi oda§ haline gelmi³tir [89-126]. Bir
çok ara³trmac, tek boyutlu kesirli difüzyon denkleminin çözümlerinin varl§n
ve yakla³k çözümlerini verdi. Bu denklemin analitik çözümü için iki basamakl
Adomian decomposition metodu kullanld [49]. Mingrong Cui yüksek mertebeden kompakt sonlu fark ³emas olu³turdu ve dura§anlk analizi yapt [65]. [66] da
bu problemin çözümü için sonlu fark metodu uyguland ve baz örnekler verildi .
[67] de nümerik metodlar kullanlarak sonlu bir tanm kümesi üzerinde de§i³ken
katsayl kesirli difüzyon ba³langç-snr de§er probleminin bir snf incelendi ve
dura§anlk, tutarllk ve yaknsaklk analizi yapld. [48] de yenilenmi³ decomposition metodu ile kesirli difüzyon denklemi analitik olarak çözüldü. Bu çal³mada
28
kesirli difüzyon denklemi nümerik olarak iki farkl metod ile çözülecektir:
i. Bu difüzyon denklemini öncelikle non-polynomial spline metoduyla nümerik
olarak çözelim:
(4.1) diferansiyel denklemi,
(xi , ui )
grid noktalarnda Caputo kesirli türevi kulla-
nlarak
ui − fi
1 Z xi
00
(xi − µ)−0.8 ui (µ)dµ + qi ,
= di
k
Γ(0.2) 0
³eklinde diskritize edilebilir. Burada ksalk açsndan
ui−1
ve
qi := q(xi , tj )
(4.2)
di := d(xi ), fi := f (xi ) =
olarak alnm³tr. Dolaysyla
ui − fi
di
=
I + qi ,
k
Γ(0.2)
dir ki, burada
I=
R xi
0
(4.3)
00
(xi − µ)−0.8 ui (µ)dµ
integralidir.
Bu integrale iki kez ksmi integrasyon uygulanrsa
I=
elde edilir.
ui (µ)
bir
36 Z xi
(xi − µ)−2.8ui (µ)dµ
25 0
µ = xi
(4.4)
noktasnda Taylor serisine açlp, (4.1) de yerlerine
konulursa
Z xi
ui − fi
di 36
(xi − µ)−2.8 dµ
=
[ (ui (xi )
0
k
Γ(0.2) 25
0
+ui (xi )
Z xi
0
u (xi ) Z xi
dµ + i
(xi − µ)−0.8 dµ)] + qi
0
2
00
(xi − µ)
−1.8
(4.5)
elde edilir ve cebirsel ara i³lemler sonucu da
ui − fi
00
0
= −2ax3i ui (xi ) + ax2i ui (xi ) + bxi ui (xi ) + qi .
k
elde edilir. Burada
a :=
−3Γ(2.2)
,
10Γ(0.2)
−2Γ(2.2)
dir. (4.6) da
15Γ(0.2)
b :=
(4.6)
00
Mi = ui (xi )
yazlrsa
ui − fi
0
= −2ax3i Mi + ax2i ui (xi ) + bxi ui (xi ) + qi .
k
ba§nts elde edilir. (4.7) de
Mi
(4.7)
yalnz braklrsa
0
Mi = ci ui + di ui + ei
elde edilir ki burada
u
ci :=
1
,
2xi
di :=
axi k−1
,
2bx3i k
ei :=
(4.8)
fi +kqi
dir.
2bx3i k
nun birinci türev özde³likleri
ui+1 − ui−1 0 ∼ 3ui+1 − 4ui + ui−1 0 ∼ −ui+1 + 4ui − 3ui−1
0
, ui+1 =
, ui−1 =
,
ui ∼
=
2h
2h
2h
29
(4.9)
³eklindedir. Bu özde³likler (4.8) de kullanlrsa
Mi = ci
ui+1 − ui−1
+ di ui + ei
2h
(4.10)
olur. Benzer ³ekilde
3ui+1 − 4ui + ui−1
+ di+1 ui+1 + ei+1
2h
(4.11)
−ui+1 + 4ui − 3ui−1
+ di−1 ui−1 + ei−1
2h
(4.12)
Mi+1 = ci+1
Mi−1 = ci−1
e³itlikleri elde edilir. Bu e³itlikler (3.13) te yerine konulursa, a³a§daki
bilinmeyenli,
(n − 1)
(n + 1)
lineer denklem elde edilir:
α
β
3α
1
ci+1 − ci −
ci−1 + αdi−1 − 2 ui−1 +
2h
h
2h
h
2α
2α
2
− ci+1 + 2βdi +
ci−1 + 2 ui +
h
h
h
3α
β
α
1
ci+1 + ci − ci−1 + αdi+1 − 2 ui+1
2h
h
2h
h
= −(αei+1 + 2βei + αei−1 ).
α
β
3α
ci+1 − ci −
ci−1 + αdi−1 −
2h
h
2h
2α
2
2α
ci−1 + 2
c2 = − ci+1 + 2βdi +
h
h
h
β
α
3α
ci+1 + ci − ci−1 + αdi+1 −
c3 =
2h
h
2h
c1 =
yazlrsa a³a§daki matrisler elde edilmi³ olur:
2
A=
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
4
3
1
0
0
...
0
0
c1 c2 c3
0
...
0
0
c1 c2 c3
0
...
0
0
0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0
...
0
0
c1 c2 c3
.
.
.
.
0
30
0
1
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
5
1
h2
1
h2
(4.13)
2
B=
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
4
3
u(0, t) = 0
−(αe0 + 2βe1 + αe2 )
−(αe1 + 2βe2 + αe3 )
.
.
.
−(αen−2 + 2βen−1 + αen )
u(1, t) = e−t
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
5
U = [u0 , u1 , ..., un ]0 .
Matlab 7.0.1 program yardmyla
AU = B
(4.14)
denklem sisteminin çözümünden
yakla³k sonucu elde edilir. Nümerik çözüm sonucu
n
U
nin farkl de§erleri için
bulunan maksimum mutlak hatalar Tablo 1. de listelenmi³tir.
4.2
Nümerik Da§lm Ba§ntlar
Bu bölümde yukarda uygulanan yöntemin ve ortaya çkan çözüm ³emalarnn
tutarl ve yaknsak oldu§unu göstermek için nümerik da§lm analizi yaplacaktr.
Bu ise (4.1) diferansiyel denkleminin nümerik da§lm ba§ntlarnn bulunup kar³la³trlmasyla mümkündür. Bunun için de (4.1) denkleminin (4.13) lineerle³tirilmi³ formu ile (4.1) sürekli formlarnn da§lm ba§ntlar bulunarak kar³la³trma
yaplacaktr. Nümerik da§lm ba§ntlar
u˜nj = uˆei(jk∆x+nω∆t) ,
i=
√
−1
(4.15)
kullanlarak elde edilir [68, 69]. Ksalk açsndan, lineerle³tirilmi³ denklemin
çözümü yerine
u, k¯ := k∆x
ve
ω
¯ := ω∆t
u˜
yazlrsa
¯
unj = uˆei(j k+n¯ω)
elde edilir. Diskrit da§lm ba§nts ile sürekli olann kar³la³trmak için
(4.16)
¯
ω
¯ =ω
¯ (k)
yazlsn. imdi öncelikle (4.13) kesikli durumun da§lm ba§ntlarn bulalm:
¯
unj = uˆei(j k+n¯ω)
31
(4.17)
idi. Benzer ³ekilde
¯
unj−1 = uˆei((j−1)k+n¯ω)
(4.18)
¯
unj+1 = uˆei((j+1)k+n¯ω)
(4.19)
yazlp (4.13) te yerine konuldu§unda
¯
¯
¯
uˆei(j k+n¯ω) c1e−ik + c2 + c3eik = −(αe(xj+1 ) + 2βe(xj ) + αe(xj−1 ))
(4.20)
elde edilir. Buradan
¯
ei(j k+n¯ω) =
elde edilir. Burada
−(αe(xj+1 ) + 2βe(xj ) + αe(xj−1 ))
c1e−ik¯ + c2 + c3eik¯ uˆ
(4.21)
uˆ = 1 olarak alnabilir. Dolaysyla gerekli düzenlemeler sonucu
"
−(αe(xj+1 ) + 2βe(xj ) + αe(xj−1))
i(j k¯ + n¯
ω ) = ln
c1e−ik¯ + c2 + c3eik¯
¯
¯
⇒ n¯
ω = −i ln(D) − j k¯ + i ln c1e−ik + c2 + c3eik
⇒ω
¯=
#
(4.22)
(4.23)
i
1h
¯
¯
−i ln(D) − j k¯ + i ln c1e−ik + c2 + c3eik
n
(4.24)
¯ = 1 −i ln(D) − j k¯ + i ln cos(k(c1
¯
¯
⇒ω
¯ (k)
+ c3)) − i sin(k(c1
− c3))
(4.25)
n
1
[−i ln(D) − jk∆x + i ln (cos(k∆x(c1 + c3)) − i sin(k∆x(c1 − c3)))]
⇒ω=
n∆t
(4.26)
ba§nts elde edilir ki burada
D = (αe(xj+1 ) + 2βe(xj ) + αe(xj−1 ))
dir.
imdi de sürekli ksmn da§lm ba§nts bulunacaktr. Bunun için (4.7) den
ut + A1 uxx + A2 ux + A3 u + A4 = 0
ba§nts ele alnsn. Burada
A1 := 2ax3i , A2 := −ax2i , A3 := −bxi
(4.27)
ve
A4 := −qi
dir.
u = ei(kx+ωt)
(4.28)
oldu§undan buradan
ux = ikei(kx+ωt) ,
uxx = −k 2 ei(kx+ωt) ,
ut = iωei(kx+ωt)
(4.29)
elde edilir. (4.29) ba§ntlar (4.27) de yerine konulursa
iωei(kx+ωt) − A1 k 2 ei(kx+ωt) + A2 ikei(kx+ωt) + A3 ei(kx+ωt) + A4 = 0
32
(4.30)
⇒ ei(kx+ωt) iω − A1 k 2 + A2 ik + A3 + A4 = 0
(4.31)
⇒ eiωt eikx iω − A1 k 2 + A2 ik + A3 + A4 = 0
⇒ eiωt =
⇒ω=
(4.32)
−A4 e−ikx
iω − A1 k 2 + A2 ik + A3
(4.33)
(1 + i)t (A1 k 2 + A2 ik + A3 ) − A4 (cos(kx) − i sin(kx))
i(1 + 1)t
(4.34)
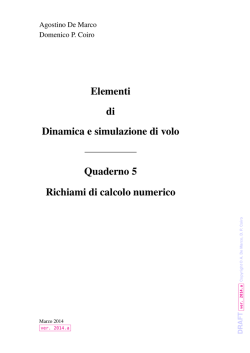
elde edilir. Elde edilen bu (4.26) ve (4.34) ba§ntlar Matlab 7.0.1 program yardmyla kar³la³trlrsa a³a§daki grak elde edilir ki bu da yukarda uygulanan
yöntemin bu problem için tutarl ve yaknsak oldu§unu gösterir.
DAGILIM ψ
3
2/3
ω∆t
1
0
−1
−2
−3
−3
−2
−1
0
1
2/3
3
ekil 4.1: (4.26) ve (4.34) nin kar³la³trlmas
Çözümün tutarl ve yaknsak olmas için e§rilerin birbirini en az bir noktada
kesmesi gerekiyordu, grakten de görüldü§ü üzere e§riler iki noktada kesi³ti. Dolaysyla uygulanan yöntem ve çözümler tutarldr ve yaknsaktr.
33
ii. imdi (4.1) diferansiyel denklemini Galerkin metodu ile nümerik olarak çözelim:
Kesirli difüzyon denkleminde spline metoddaki gibi Caputo kesirli türevi kullanlp gerekli cebirsel ara i³lemler yaplrsa
00
0
2akx3 u − akx2 u + (1 − kxb)u − f (x) − k(1 + x)e−t x3 = 0
−3Γ(2.2)
,
10Γ(0.2)
a=
elde edilir. Burada hatrlatmak gerekirse
b=
(4.35)
−2Γ(2.2)
idi. imdi (4.35)
15Γ(0.2)
diferansiyel denklemine Galerkin metodunu uygulayalm:
Z
1
3
2akx U
W
00
0
2
−t 3
− akx U + (1 − kxb)U − f (x) − k(1 + x)e
dx = 0,
x
0
(4.36)
∀W (x) ∈ Vh
0
U (x)
olacak ³ekilde bir
Z
1
3
2akx W U
00
yakla³k çözümü bulunacaktr. Düzenleme yaplrsa
Z
0
2
− akx W U + (1 − kxb)W U
−t 3
(W f (x) + W k(1 + x)e
0
0
(4.37)
x )dx
0
elde edilir. (4.37) e³itli§inde
Z 1
1
dx =
R1
0
00
2akx3 W U dx
00
0
2akx3 W U dx = [2akx3 W U ]10 −
integraline ksmi integrasyon uygulanrsa
Z 1
0
0
0
elde edilir ki burada
[2akx3 W U ]10 = 0
0
0
(6akx2 W U + 2akx3 W U )dx
W (0) = W (1) = 0
dr çünkü
(4.38)
dr. (4.38) e³itli§i
(4.37) de yerine konursa
Z
1
0
2
0
3
(1 − kxb)W U − 7akx W U − 2akx W U
0
Z
0
1
−t 3
(W f (x) + W k(1 + x)e
dx =
(4.39)
x )dx
0
elde edilir. Burada
U (x) =
n
X
cj ϕj (x),
n
X
U 0 (x) =
j=1
kullanlrsa
U (x)
−
3
0
2akx si ϕi (x)
n
X
i=1
n
X
(1 − kxb)si ϕi (x)
i=1
Z
1
W 0 (x) =
n
X
si ϕ0i (x)
i=1
0
cj ϕj (x)]dx =
j=1
n
X
|i − j| > 1
oldu§unda
ϕj
i=1
ϕi
−t 3
si ϕi (x)k(1 + x)e
x
(4.40)
dx
i=1
R1
0
0
cj ϕj (x)
j=1
n
X
i=1
ve
n
X
2
7akx si ϕi (x)
si ϕi (x)f (x) +
0
j=1
n
X
cj ϕj (x) −
|i − j| > 1 oldu§u durumlarda
dr, çünkü
si ϕi (x),
i=1
n
X
1
0
n
X
n
X
yakla³k çözümü bulunabilir. Bu e³itlikler (4.39) da yerine konulursa
[
0
W (x) =
j=1
Z
elde edilir.
cj ϕ0j (x),
ϕ0j ϕ0i dx = 0,
R1
0
ϕ0j ϕi dx = 0 ve
R1
0
ϕj ϕi dx =
çak³mazlar yani ortak noktalar bulunmaz.
Buna göre gerekli düzenlemeler sonucu
n
X
i=1
si
Z 1X
n
0 j=1
cj (1 − kxb)ϕj (x)ϕi (x) − 7akx2 ϕ0j (x)ϕi (x) − 2akx3 ϕ0j (x)ϕ0i (x) dx
=
n
X
i=1
si
Z 1
0
ϕi (x)f (x) + ϕi (x)k(1 + x)e−t x3 dx
34
(4.41)
elde edilir.
j = 1, .., n
a1 (x) := 1 − kxi b, a2 (x) := −7akx2i
a3 (x) := −2akx3i
α12 =
h
Z 3h
α22 =
h
Z 3h
α32 =
i = m, j = 1, .., n
2h
i = 2,
α(m+1)m =
(m−1)h
(m−1)h
Z (m+1)h
mh
i = n − 1, j = 1, .., n
(n−1)h
Z (n)h
α(n−1)(n−1) =
α(n)(n−1) =
(a1 (x)ϕ3 ϕ2 + a2 (x)ϕ03 ϕ2 + a3 (x)ϕ03 ϕ02 )dx,
(a1 (x)ϕm+1 ϕm + a2 (x)ϕ0m+1 ϕm + a3 (x)ϕ0m+1 ϕ0m )dx,
(a1 (x)ϕn−2 ϕn−1 + a2 (x)ϕ0n−2 ϕn−1 + a3 (x)ϕ0n−2 ϕ0n−1 )dx
(a1 (x)ϕn−1 ϕn−1 + a2 (x)ϕ0n−1 ϕn−1 + a3 (x)ϕ0n−1 ϕ0n−1 )dx
(n−2)h
Z (n−1)h
nh
(a1 (x)ϕm ϕm + a2 (x)ϕ0m ϕm + a3 (x)ϕ0m ϕ0m )dx
için
Z (n−2)h
α(n−2)(n−1) =
(a1 (x)ϕ2 ϕ2 + a2 (x)ϕ02 ϕ2 + a3 (x)ϕ02 ϕ02 )dx
(a1 (x)ϕm−1 ϕm + a2 (x)ϕ0m−1 ϕm + a3 (x)ϕ0m−1 ϕ0m )dx
Z (m+1)h
αmm =
(a1 (x)ϕ1 ϕ2 + a2 (x)ϕ01 ϕ2 + a3 (x)ϕ01 ϕ02 )dx
için
Z mh
α(m−1)m =
(a1 (x)ϕn ϕn−1 + a2 (x)ϕ0n ϕn−1 + a3 (x)ϕ0n ϕ0n−1 )dx,
e³itlikleri elde edilir ki buradan a³a§daki matrisler elde edilir:
3
2
0
0
6 1
6
6 α
6 12 α22 α32
6
6
6
6
6
6
6
A =6
6
6
6
6
6
6
6
6
6
4
dersek
için
Z 2h
ve
ve
0
0
...
0
0
...
0
0
...
α23 α33 α43
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0
...
0
0
.
.
.
.
α(n−2)(n−1) α(n−1)(n−1)
0
0
Benzer ³ekilde (4.41) e³itli§inin sa§ taraf da
35
B
0
7
7
7
0
7
7
7
7
0
7
7
7
.
7
7.
7
.
7
7
7
7
.
7
7
αn(n−1) 7
7
5
1
matrisi olarak
3
2
u(0, t) = 0
6
6
R
3h
6
−t 3
6
h ϕ2 (f (x) + k(1 + x)e x )dx
6
R 4h
6
−t 3
6
2h ϕ3 (f (x) + k(1 + x)e x )dx
6
6
6
.
6
B =6
6
.
6
6
6
6
.
6
6 R (n+1)h
6
−t 3
6 (n−1)h ϕn (f (x) + k(1 + x)e x )dx
4
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
5
u(1, t) = e−t
³eklinde bulunur. Dolaysyla
elde edilir. Elde edilen bu
cj
AC = B denklem sisteminin çözümünden C = [c1 , c2 , ..., cn ]
ler
U (x) =
Pn
çözümü elde edilir. Nümerik çözüm sonucu
j=1 cj ϕj (x)
te yerine konulursa
U (x) yakla³k
n nin farkl de§erleri için bulunan maksimum
mutlak hatalar Tablo 1. de listelenmi³tir.
36
Tablo 1: Maksimum mutlak hatalar,
k = 0.01
n
Spline metodu
Galerkin metodu
[62]
[67]
11
8.762e-04
9.242e-04
0.10446
1.822e-03
21
1.265e-04
5.762e-04
0.10518
1.168e-03
61
6.307e-05
1.723e-04
8.644e-04
121
1.591e-05
6.175e-05
6.848e-04
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
90
80
70
120
60
100
50
80
40
60
30
40
20
20
10
0
ekil 4.2: Problem 1 de
u(x, t)
0
nin çözüm gra§i,
37
n = 81, k = 0.01
Kesirli türevli diferansiyel denklem sistemleri mekanik, viskoelastiklik, biyoloji, zik ve mühendislik ve bunun gibi di§er uygulamalardaki problemlerin modellenmesinde
skça kullanlmaktadr. Genel olarak, söz konusu denklem sistemlerinin bir gerçek çözümü bulunmamaktadr ancak belli metodlarla yakla³k çözümleri elde edilebilmi³tir.
Söz konusu metodlar homotopy perturbation metodu [172,173], Adomian decomposition metodu [174-176], variation iteration metodu [177,178] ve homotopy analysis metodudur [179-183]. Bu çözümler analitik çözümlerdir, söz konusu denklem sistemlerinin
saysal çözümleri bulunmamaktadr. Bu çal³mada lineer ve lineer olmayan kesirli türevli diferansiyel denklem sistemleri non-polynomial kübik spline ve Galerkin metoduyla
çözülmü³tür:
4.3
Problem 2.
8
1.8
>
<d u
dv
− x dx
+ u = x3 − 2x2 + 6x
dx
(4.42)
>
: d1.8 v − x du + uv = x2 − x
dx
dx
u(0) = u(1) = 0, v(0) = v(1) = 0
ba³langç ko³ullar ve
u(x) = x3 − x, v(x) = x2 − x
analitik çözümleri ile verilen lineer olmayan kesirli diferansiyel denklem sistemini ele
alalm. Bu problemi non-polynomial kübik spline metoduyla çözelim. Önceki sorudan
benzer olarak
u1.8
i
u1.8
i
türevi
36
=
(ui (xi )
25Γ(0.2)
Z xi
0
−2.8
(xi − µ)
00
u (xi )
+ i
2
olarak bulunur. Burada
vi1.8
Z xi
0
4xi−1.8
5Γ(0.2) ,
gi :=
0
dµ + ui (xi )
Z xi
0
(xi − µ)−1.8 dµ
(xi − µ)−0.8 dµ) = gi ui + hi u0i + mi u00i
hi :=
9xi−0.8
5Γ(0.2)
ve
mi :=
18x0.2
i
5Γ(0.2)
(4.43)
dir. Benzer ³ekilde
türevi de
vi1.8 =
36
(vi (xi )
25Γ(0.2)
Z xi
00
+
0
0
(xi − µ)−2.8 dµ + vi (xi )
vi (xi )
2
Z xi
0
Z xi
0
(xi − µ)−1.8 dµ
(xi − µ)−0.8 dµ) = gi vi + hi vi0 + mi vi00
(4.44)
olarak elde edilir. Elde edilen bu türevler (4.42) de yerine konursa
8
>
<
(1 + gi )ui + hi u0i + mi u00i − xi vi0 = x3i − 2x2i + 6xi
>
:g v + h v 0 + m v 00 − x u0 + u v = x2 − x
i i
i i
i i
i i
i i
i
i
38
(4.45)
lineer olmayan diferansiyel denklem sistemi elde edilmi³ olur.
i. (4.45) diferansiyel denklem sisteminde ilk olarak
(1 + gi )ui + hi u0i + mi u00i − xi vi0 = x3i − 2x2i + 6xi
diferansiyel denklemini diskritize edelim: (4.46) da
u00i = Mi
(4.46)
yazlrsa
(1 + gi )ui + hi u0i + mi Mi − xi vi0 = x3i − 2x2i + 6xi
elde edilir. Bu e³itlikte
Mi
(4.47)
yalnz braklrsa
Mi = Gi ui + Hi u0i + Ki vi0 + Fi
elde edilir ki burada
hi
i
Gi := − 1+g
mi , Hi := − mi , Ki :=
xi
mi
(4.48)
ve
Fi :=
x3i −2x2i +6xi
mi
dir.
Dolaysyla benzer ³ekilde
0
Mi+1 = Gi+1 ui+1 + Hi+1 u0i+1 + Ki+1 vi+1
+ Fi+1
(4.49)
0
Mi−1 = Gi−1 ui−1 + Hi−1 u0i−1 + Ki−1 vi−1
+ Fi−1
(4.50)
e³itlikleri elde edilir. (4.9) daki özde³liklere benzer olarak
vi+1 − vi−1 0 ∼ 3vi+1 − 4vi + vi−1 0 ∼ −vi+1 + 4vi − 3vi−1
0
vi ∼
, vi+1 =
, vi−1 =
,
=
2h
2h
2h
(4.51)
özde³likleri de yazlabilir. (4.9) ve (4.51) özde³likleri srasyla (4.48), (4.49) ve (4.50) de
gerekli yerlere konursa
vi+1 − vi−1
ui+1 − ui−1
+ Ki
+ Fi
2h
2h
3vi+1 − 4vi + vi−1
3ui+1 − 4ui + ui−1
+ Ki+1
+ Fi+1
Mi+1 = Gi+1 ui+1 + Hi+1
2h
2h
−ui+1 + 4ui − 3ui−1
−vi+1 + 4vi − 3vi−1
Mi−1 = Gi−1 ui−1 +Hi−1
+Ki−1
+Fi−1
2h
2h
Mi = Gi ui + Hi
(4.52)
(4.53)
(4.54)
e³itlikleri elde edilir. Bu e³itlikler (3.13) te yerine konursa a³a§daki lineer denklem
sistemi elde edilmi³ olur:
β
3α
1
α
Hi+1 − Hi −
Hi−1 + αGi−1 − 2 ui−1 +
2h
h
2h
h
2α
2α
2
− Hi+1 + 2βGi +
Hi−1 + 2 ui +
h
h
h β
α
1
3α
Hi+1 + Hi −
Hi−1 + αGi+1 − 2 ui+1
2h
h
2h
h
β
3α
α
Ki+1 − Ki −
Ki−1 vi−1 +
2h
h
2h
2α
2α
− Ki+1 +
Ki−1 vi +
h
h
β
α
3α
Ki+1 + Ki −
Ki−1 vi+1
2h
h
2h
= −(αFi+1 + 2βFi + αFi−1 ).
39
(4.55)
8
>
1
>
α
Hi+1 − βh Hi − 3α
a1 = 2h
>
2h Hi−1 + αGi−1 − h2
>
>
>
>
2α
2
>
a2 = − 2α
>
h Hi+1 + 2βGi + h Hi−1 + h2
>
>
>
>
β
3α
α
1
<
a3 =
2h Hi+1
+ h Hi −
2h Hi−1
+ h Ki −
2h Ki−1
>
α
>
Ki+1 − βh Ki − 3α
b1 = 2h
>
2h Ki−1
>
>
>
>
2α
>
b2 = − 2α
>
h Ki+1 + h Ki−1
>
>
>
>
β
α
3α
:
b3 =
2h Ki+1
+ αGi+1 −
h2
(4.56)
yazlsn. Bu sistemden do§an matrisi daha sonra olu³turaca§z.
ii. imdi (4.45) diferansiyel denklem sisteminin ikinci diferansiyel denklemini ele alalm:
gi vi + hi vi0 + mi vi00 − xi u0i + ui vi = x2i − xi
diferansiyel denkleminde
vi00 = Ni
(4.57)
yazlrsa
gi vi + hi vi0 + mi Ni − xi u0i + ui vi = x2i − xi
elde edilir. Bu e³itlikte
Ni
(4.58)
yalnz braklrsa
Ni = Ti vi + Hi vi0 + Ki u0i + ri ui vi + Si
elde edilir ki burada
gi
hi
Ti := − m
, Hi := −
mi , Ki :=
i
xi
mi ,
ri := − m1i
(4.59)
ve
Si :=
x2i −xi
mi
dir.
Dolaysyla benzer ³ekilde
0
Ni+1 = Ti+1 vi+1 + Hi+1 vi+1
+ Ki+1 u0i+1 + ri+1 ui+1 vi+1 + Si+1
(4.60)
0
Ni−1 = Ti−1 vi−1 + Hi−1 vi−1
+ Ki−1 u0i−1 + ri−1 ui−1 vi−1 + Si−1
(4.61)
e³itlikleri elde edilir. (4.9) ve (4.51) özde³likleri srasyla (4.59), (4.60) ve (4.61) de gerekli
yerlere konursa
Ni = Ti vi + Hi
Ni+1 = Ti+1 vi+1 +Hi+1
vi+1 − vi−1
ui+1 − ui−1
+ Ki
+ ri ui vi + Si
2h
2h
(4.62)
3ui+1 − 4ui + ui−1
3vi+1 − 4vi + vi−1
+Ki+1
+ri+1 ui+1 vi+1 +Si+1
2h
2h
(4.63)
Ni−1 = Ti−1 vi−1 +Hi−1
−vi+1 + 4vi − 3vi−1
−ui+1 + 4ui − 3ui−1
+Ki−1
+ri−1 ui−1 vi−1 +Si−1
2h
2h
(4.64)
40
e³itlikleri elde edilir. Bu e³itlikler
αNi+1 + 2βNi + αNi−1 = (1/h2 )(vi+1 − 2vi + vi−1 )
(4.65)
de yerine konursa a³a§daki lineer denklemler sistemi elde edilmi³ olur:
β
3α
1
α
Hi+1 − Hi −
Hi−1 + αTi−1 − 2 vi−1 +
2h
h
2h
h
2α
2α
2
− Hi+1 + 2βTi +
Hi−1 + 2 vi +
h
h
h 3α
β
α
1
Hi+1 + Hi −
Hi−1 + αTi+1 − 2 vi+1
2h
h
2h
h
α
β
3α
Ki+1 − Ki −
Ki−1 ui−1 +
2h
h
2h
2α
2α
− Ki+1 +
Ki−1 ui +
h
h
3α
β
α
Ki+1 + Ki −
Ki−1 ui+1
2h
h
2h
αri+1 ui+1 vi+1 + 2βri ui vi + αri−1 ui−1 vi−1
= −(αSi+1 + 2βSi + αSi−1 ).
(4.66)
8
>
α
1
>
c1 = 2h
Hi+1 − βh Hi − 3α
>
2h Hi−1 + αTi−1 − h2
>
>
>
>
2α
2
>
c2 = − 2α
>
h Hi+1 + 2βTi + h Hi−1 + h2
>
>
>
>
β
3α
α
1
<
c3 =
2h Hi+1
+ h Hi −
2h Hi−1
+ h Ki −
2h Ki−1
>
α
>
d1 = 2h
Ki+1 − βh Ki − 3α
>
2h Ki−1
>
>
>
>
2α
>
d2 = − 2α
>
h Ki+1 + h Ki−1
>
>
>
>
β
3α
α
:
d3 =
2h Ki+1
+ αTi+1 −
yazlsn. (4.56) ve (4.67) ile a³a§daki matrisler elde edilir:
41
h2
(4.67)
2
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
A=6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
6
4
3
1
0
0
...
0
0
∗
0
0
...
0
0
a1 a2 a3
0
...
0
0
∗ b1 b2 b3
0
...
0
0
a1 a2 a3
0
...
0
∗
0
b1 b2 b3
0
...
0
0
0
0
0
.
.
.
.
.
.
.
∗
.
.
.
.
.
.
.
.
.
.
.
.
.
.
∗
.
.
.
.
.
.
.
.
.
.
.
.
.
.
∗
.
.
.
.
.
.
.
0
...
0
0
a1 a2 a3 ∗
0
...
0
0
b1 b2 b3
.
.
.
.
0
0
1
∗
.
.
.
.
0
0
0
∗
∗
∗
∗
∗
∗
∗
∗
∗
∗
∗
∗
∗
∗
∗
0
0
0
0
...
0
0
∗
1
0
0
0
...
0
0
d1 d2 d3
0
...
0
0
∗ c1 c2 c3
0
...
0
0
d1 d2 d3
0
...
0
∗
0
c1 c2 c3
0
...
0
0
.
.
.
.
.
.
.
∗
.
.
.
.
.
.
.
.
.
.
.
.
.
.
∗
.
.
.
.
.
.
.
.
.
.
.
.
.
.
∗
.
.
.
.
.
.
.
0
...
0
0
d1 d2 d3 ∗
0
...
0
0
c1 c2 c3
.
.
.
.
0
.
.
.
.
0
0
0
∗
42
0
1
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
5
2
3
0
6
6
6
0
6
6
6
0
6
6
6
6
.
6
6
6
.
6
6
6
6
.
6
6
6
0
6
6
6
0
6
B=6
6
6
0
6
6
6
αr0 u0 v0 + 2βr1 u1 v1 + αr2 u2 v2
6
6
6
6
αr1 u1 v1 + 2βr2 u2 v2 + αr3 u3 v3
6
6
6
.
6
6
6
.
6
6
6
6
.
6
6
6
6 αrn−2 un−2 vn−2 + 2βrn−1 un−1 vn−1 + αrn un vn
4
0
2
3
0
6
6
6
−(αF0 + 2βF1 + αF2 )
6
6
6
−(αF1 + 2βF2 + αF3 )
6
6
6
6
.
6
6
6
.
6
6
6
6
.
6
6
6 −(αF
n−2 + 2βFn−1 + αFn )
6
6
6
0
6
C=6
6
6
0
6
6
6
−(αS0 + 2βS1 + αS2 )
6
6
6
6
−(αS1 + 2βS2 + αS3 )
6
6
6
.
6
6
6
.
6
6
6
6
.
6
6
6
6 −(αSn−2 + 2βSn−1 + αsn )
4
0
43
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
5
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
5
X = [u0 , u1 , ..., un , v0 , v1 , ..., vn ]0 .
AX + B = C
Sonuç olarak
gibi bir denklem sistemi olu³turulmu³ olur ki buradan Mat-
lab 7.0.1 program yardmyla
X
yakla³k çözümü elde edilir. Nümerik çözüm sonucu
n
nin farkl de§erleri için bulunan maksimum mutlak hatalar Tablo 2 de listelenmi³tir.
Tablo 2:
u(x)
Problem
ve
v(x)
2
α = 2)
Spline (
Spline (
α = 1.8)
için bulunan nümerik sonuçlar.
n
u(x)
in max. mutlak hatalar
v(x)
in max. mutlak hatalar
21
4.8513e-006
7.7716e-005
41
1.2104e-006
1.9470e-005
81
3.0280e-007
4.8676e-006
21
1.5518e-005
5.7321e-005
41
8.6104e-006
1.8447e-005
81
3.0280e-006
6.9626e-006
0
−0.05
−0.1
−0.15
−0.2
−0.25
−0.3
−0.35
−0.4
0
0.2
0.4
ekil 4.3: Problem
2
0.6
de
u(x)
44
in gra§i (
0.8
n = 41)
1
0
−0.05
−0.1
−0.15
−0.2
−0.25
0
0.2
0.4
ekil 4.4: Problem
4.4
2
0.6
de
v(x)
1
0.8
n = 41)
in gra§i (
Problem 3
8
1.9
>
<d u
dx
+ xu + xv = 2
(4.68)
>
: d1.9 v + 2xu + 2xv = −2
dx
u(0) = u(1) = 0, v(0) = v(1) = 0
ba³langç ko³ullar ve
u(x) = x2 − x, v(x) = x − x2
analitik çözümleri ile verilen kesirli diferansiyel denklem sistemini Galerkin metoduyla
nümerik olarak çözelim. Önceki sorulardan benzer olarak
u1.9
ve
v 1.9
türevleri
10A 0 −0.9 10A −1.9
ux
−
ux
9
19
10A 0 −0.9 10A −1.9
vx
−
vx
= 10Av 00 x0.1 −
9
19
u1.9 = 10Au00 x0.1 −
v 1.9
olarak bulunur. Burada
A :=
171
100Γ(0.1)
dir. Elde edilen bu türevler (4.68) de yerine
konursa
8
>
<
10Au00 x0.1 + bu0 x−0.9 + (ax−1.9 + x)u + xv = 2
>
:10Av 00 x0.1 + bv 0 x−0.9 + (ax−1.9 + 2x)v + 2xu = −2
45
(4.69)
diferansiyel denklem sistemi elde edilmi³ olur.
i. (4.69) da ilk olarak
10Au00 x0.1 + bu0 x−0.9 + (ax−1.9 + x)u + xv = 2
(4.70)
diferansiyel denklemine Galerkin metodunu uygulayalm:
Z
1
00 0.1
10AU x
W
0 −0.9
+ bU x
+ (ax
−1.9
0
+ x)U + xV − 2 dx = 0,
(4.71)
∀W (x) ∈ Vh
0
olacak ³ekilde bir
Z 1
10Ax
0
0.1
U (x)
V (x)
ve
00
W U + bx
−0.9
elde edilir. (4.72) e³itli§inde
yakla³k çözümü bulunacaktr. Düzenleme yaplrsa
0
W U + (ax
R1
−1.9
Z 1
+ x)W U + xV dx =
0
2W dx
(4.72)
00
10Ax0.1 W U dx
0
integraline ksmi integrasyon uygula-
nrsa
Z 1
0
00
0
2akx3 W U dx = [10Ax0.1 W U ]10 −
Z 1
0
0
(Ax−0.9 W U + 10Ax0.1 W 0 U 0 )dx
0
[2akx3 W U ]10 = 0
elde edilir ki burada
dr çünkü
W (0) = W (1) = 0
(4.73)
dr. (4.73) e³itli§i
(4.72) de yerine konursa
Z
1
−10Ax
0.1
0
0
W U + (b − A)x
−0.9
0
W U + (ax
−1.9
+ x)W U + xV
Z
1
dx =
(4.74)
2W dx
0
0
elde edilir. Burada
8
P
>
>
U (x) = nj=1 cj ϕj (x),
>
>
<
P
V (x) = np=1 kp ϕp (x),
>
>
>
Pn
>
:
i=1 si ϕi (x),
W (x) =
U 0 (x) =
Pn
V 0 (x) =
W 0 (x) =
0
j=1 cj ϕj (x),
Pn
0
p=1 kp ϕp (x),
(4.75)
Pn
0
i=1 si ϕi (x)
kullanlp (4.74) te yerine konulursa
Z
n
X
1
[
0
n
X
(ax
+
−1.9
−10Ax
R1
0
ve
n
X
0
si ϕi (x)
i=1
+ x)si ϕi (x)
cj ϕj (x) +
ϕj ϕi dx = 0 dr,
R1
0
ve
ϕ0i ϕ0p dx = 0,
|i − p| > 1 oldu§unda ϕj , ϕi
xsi ϕi (x)
ve
0
ϕp
n
X
si ϕi (x)
1
n
X
kp ϕp (x)]dx =
ϕ0i ϕp dx = 0 ve
R1
0
R1
0
(4.76)
2si ϕi (x)dx
0
p=1
0
cj ϕj (x)
j=1
Z
oldu§u durumlarda
R1
−0.9
n
X
i=1
|i − p| > 1
(b − A)x
i=1
n
X
j=1
|i − j| > 1
n
X
0
cj ϕj (x) +
j=1
n
X
i=1
elde edilir.
0.1
i=1
ϕ0j ϕ0i dx = 0,
R1
0
ϕ0j ϕi dx = 0,
ϕi ϕi dx = 0 dr çünkü |i − j| > 1
çak³mazlar yani ortak noktalar bulunmaz. Buna
göre gerekli düzenlemeler sonucu
n
X
i=1
si
Z 1 X
n
0
[
j=1
cj −10Ax0.1 ϕ0i (x)ϕ0j (x) + (b − A)x−0.9 ϕi (x)ϕ0j (x) + (ax−1.9 + x)ϕi (x)ϕj (x)
+
n
X
p=1
46
kp xϕi (x)ϕp (x)]dx =
n
X
i=1
Z 1
si
0
2ϕi (x)dx
elde edilir.
a1 (x) := −10Ax0.1 , a2 (x) := (b − A)x−0.9
i = 2, j = 1, .., n
ve
a3 (x) := (ax−1.9 + x)
denirse
için
Z 2h
α12 =
h
Z 3h
α22 =
h
Z 3h
α32 =
2h
Z 2h
β12 =
h
Z 3h
β22 =
h
Z 3h
β32 =
i = m, j = 1, .., n
2h
(a1 (x)ϕ01 ϕ02 + a2 (x)ϕ01 ϕ2 + a3 (x)ϕ1 ϕ2 )dx
(a1 (x)ϕ02 ϕ02 + a2 (x)ϕ02 ϕ2 + a3 (x)ϕ2 ϕ2 )dx
(a1 (x)ϕ03 ϕ02 + a2 (x)ϕ03 ϕ2 + a3 (x)ϕ3 ϕ2 )dx
(xϕ1 ϕ2 )dx
(xϕ2 ϕ2 )dx
(xϕ3 ϕ2 )dx,
için
Z mh
α(m−1)m =
(m−1)h
(a1 (x)ϕ0m−1 ϕ0m + a2 (x)ϕ0m−1 ϕm + a3 (x)ϕm−1 ϕm )dx
Z (m+1)h
αmm =
α(m+1)m =
β(m−1)m =
βmm =
(m−1)h
Z (m+1)h
mh
Z mh
(a1 (x)ϕ0m ϕ0m + a2 (x)ϕ0m ϕm + a3 (x)ϕm ϕm )dx
(a1 (x)ϕ0m+1 ϕ0m + a2 (x)ϕ0m+1 ϕm + a3 (x)ϕm+1 ϕm )dx
(xϕm−1 ϕm )dx
(m−1)h
Z (m+1)h
(m−1)h
(xϕm ϕm )dx
Z (m+1)h
β(m+1)m =
ve
(xϕm+1 ϕm )dx,
mh
i = n − 1, j = 1, .., n
için
Z (n−2)h
α(n−2)(n−1) =
(n−1)h
Z (n)h
α(n−1)(n−1) =
(n−2)h
(a1 (x)ϕ0n−1 ϕ0n−1 + a2 (x)ϕ0n−1 ϕn−1 + a3 (x)ϕn−1 ϕn−1 )dx
Z (n−1)h
α(n)(n−1) =
β(n−2)(n−1) =
(a1 (x)ϕ0n−2 ϕ0n−1 + a2 (x)ϕ0n−2 ϕn−1 + a3 (x)ϕn−2 ϕn−1 )dx
nh
Z (n−2)h
(a1 (x)ϕ0n ϕ0n−1 + a2 (x)ϕ0n ϕn−1 + a3 (x)ϕn ϕn−1 )dx
(xϕn−2 ϕn−1 )dx
(n−1)h
Z (n)h
β(n−1)(n−1) =
(n−2)h
(xϕn−1 ϕn−1 )dx
Z (n−1)h
β(n)(n−1) =
nh
(xϕn ϕn−1 )dx,
47
e³itlikleri elde edilir.
ii. imdi de (4.69) den
10Av 00 x0.1 + bv 0 x−0.9 + (ax−1.9 + 2x)v + 2xu = −2
(4.77)
diferansiyel denklemine Galerkin metodunu uygulayalm:
Z
1
10AV
W
00 0.1
0 −0.9
+ bV x
x
+ (ax
−1.9
0
+ 2x)V + 2xU + 2 dx = 0,
(4.78)
∀W (x) ∈ Vh
0
olacak ³ekilde bir
Z
U (x)
V (x)
ve
yakla³k çözümü bulunacaktr. Düzenleme yaplrsa
1
10Ax
0.1
WV
00
+ bx
−0.9
0
W V + (ax
−1.9
+ 2x)W V + 2xU
Z
1
dx =
(4.79)
−2W dx
0
0
elde edilir. (4.79) e³itli§inde
R1
0
00
10Ax0.1 W V dx
integraline ksmi integrasyon uygula-
nrsa
Z 1
0
00
0
2akx3 W V dx = [10Ax0.1 W V ]10 −
Z 1
0
0
(Ax−0.9 W V + 10Ax0.1 W 0 V 0 )dx
0
[2akx3 W V ]10 = 0
elde edilir ki burada
dr çünkü
W (0) = W (1) = 0
(4.80)
dr. (4.80) e³itli§i
(4.79) da yerine konursa
Z
1
−10Ax
0.1
0
0
W V + (b − A)x
−0.9
0
W V + (ax
−1.9
+ 2x)W V + 2xU
Z
1
dx =
0
(4.81)
−2W dx
0
elde edilir. Burada (4.75) teki özde³likler kullanlp (4.81) de yerine konacak olursa
Z
n
X
1
[
0
n
X
(ax
+
−1.9
−10Ax
0.1
0
i=1
n
X
n
X
kp ϕp (x) +
p=1
0
ϕ0j ϕ0i dx = 0,
0
ϕi ϕi dx = 0
R1
n
X
i=1
si
Z 1 X
n
0
[
p=1
R1
0
ϕ0j ϕi dx = 0,
0
n
X
si ϕi (x)
Z
0
kp ϕp (x)
p=1
1
n
X
cj ϕj (x)]dx =
(4.82)
−2si ϕi (x)dx
0
j=1
i=1
|i − j| > 1 ve |i − p| > 1 oldu§u durumlarda
ϕj ϕi dx = 0
dr,
R1
0
ϕ0i ϕ0p dx = 0,
R1
0
ϕ0i ϕp dx = 0
ve
dr. Buna göre gerekli düzenlemeler sonucu
kp −10Ax0.1 ϕ0i (x)ϕ0p (x) + (b − A)x−0.9 ϕi (x)ϕ0p (x) + (ax−1.9 + 2x)ϕi (x)ϕp (x)
+
n
X
cj 2xϕi (x)ϕj (x)]dx =
j=1
elde edilir.
−0.9
n
X
2xsi ϕi (x)
i=1
R1
(b − A)x
i=1
elde edilir. Burada da yukarda oldu§u gibi
R1
n
X
0
kp ϕp (x) +
p=1
+ 2x)si ϕi (x)
i=1
n
X
si ϕi (x)
b1 (x) := −10Ax0.1 , b2 (x) := (b − A)x−0.9
48
n
X
Z 1
si
i=1
ve
b3 (x) := (ax−1.9 + 2x)
0
−2ϕi (x)dx
denirse
i = 2, j = 1, .., n
için
Z 2h
γ12 =
h
Z 3h
γ22 =
h
Z 3h
γ32 =
2h
Z 2h
η12 =
h
Z 3h
η22 =
h
Z 3h
η32 =
i = m, j = 1, .., n
2h
(b1 (x)ϕ01 ϕ02 + b2 (x)ϕ01 ϕ2 + b3 (x)ϕ1 ϕ2 )dx
(b1 (x)ϕ02 ϕ02 + b2 (x)ϕ02 ϕ2 + b3 (x)ϕ2 ϕ2 )dx
(b1 (x)ϕ03 ϕ02 + b2 (x)ϕ03 ϕ2 + b3 (x)ϕ3 ϕ2 )dx
(2xϕ1 ϕ2 )dx
(2xϕ2 ϕ2 )dx
(2xϕ3 ϕ2 )dx,
için
Z mh
γ(m−1)m =
(m−1)h
(b1 (x)ϕ0m−1 ϕ0m + b2 (x)ϕ0m−1 ϕm + b3 (x)ϕm−1 ϕm )dx
Z (m+1)h
γmm =
(m−1)h
Z (m+1)h
γ(m+1)m =
mh
(b1 (x)ϕ0m ϕ0m + b2 (x)ϕ0m ϕm + b3 (x)ϕm ϕm )dx
(b1 (x)ϕ0m+1 ϕ0m + b2 (x)ϕ0m+1 ϕm + b3 (x)ϕm+1 ϕm )dx
Z mh
η(m−1)m =
(m−1)h
(2xϕm−1 ϕm )dx
Z (m+1)h
ηmm =
η(m+1)m =
ve
(m−1)h
Z (m+1)h
(2xϕm+1 ϕm )dx,
mh
i = n − 1, j = 1, .., n
için
Z (n−2)h
γ(n−2)(n−1) =
γ(n−1)(n−1) =
(n−1)h
Z (n)h
(n−2)h
η(n−2)(n−1) =
(b1 (x)ϕ0n−2 ϕ0n−1 + b2 (x)ϕ0n−2 ϕn−1 + b3 (x)ϕn−2 ϕn−1 )dx
(b1 (x)ϕ0n−1 ϕ0n−1 + b2 (x)ϕ0n−1 ϕn−1 + b3 (x)ϕn−1 ϕn−1 )dx
Z (n−1)h
γ(n)(n−1) =
(2xϕm ϕm )dx
nh
Z (n−2)h
(b1 (x)ϕ0n ϕ0n−1 + b2 (x)ϕ0n ϕn−1 + b3 (x)ϕn ϕn−1 )dx
(2xϕn−2 ϕn−1 )dx
(n−1)h
Z (n)h
η(n−1)(n−1) =
(n−2)h
(2xϕn−1 ϕn−1 )dx
Z (n−1)h
η(n)(n−1) =
nh
(2xϕn ϕn−1 )dx,
e³itlikleri elde edilir ki buradan a³a§daki matrisler elde edilir:
49
2
3
6 1
6
6 α
6 12
6
6
6 0
6
6
6 .
6
A1 = 6
6
6 .
6
6
6 .
6
6
6 0
6
4
.
0
0
α22 α32
0
...
0
0
...
0
0
...
α23 α33 α43
0
7
7
7
0
7
7
7
7
0
7
7
7
.
7
7,
7
.
7
7
7
7
.
7
7
αn(n−1) 7
7
5
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
0
0
.
.
.
0
0
1
0
...
0
0
0
...
0
0
...
α(n−2)(n−1) α(n−1)(n−1)
2
3
0
0
6 0
6
6 β
6 12 β22 β32
6
6
6
6
6
6
6
A2 = 6
6
6
6
6
6
6
6
6
6
4
0
β23 β33 β43
7
7
7
0
7
7
7
7
0
7
7
7
.
7
7,
7
.
7
7
7
7
.
7
7
βn(n−1) 7
7
5
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0
...
0
0
.
.
.
.
0
0
0
0
...
0
0
0
...
0
0
...
β(n−2)(n−1) β(n−1)(n−1)
2
3
0
0
6 0
6
6 γ
6 12 γ22 γ32
6
6
6
6
6
6
6
A3 = 6
6
6
6
6
6
6
6
6
6
4
0
γ23 γ33 γ43
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0
...
0
0
.
.
.
.
γ(n−2)(n−1) γ(n−1)(n−1)
0
50
0
7
7
7
0
7
7
7
7
0
7
7
7
.
7
7,
7
.
7
7
7
7
.
7
7
γn(n−1) 7
7
5
0
2
3
6 1
6
6 η
6 12
6
6
6 0
6
6
6 .
6
A4 = 6
6
6 .
6
6
6 .
6
6
6 0
6
4
.
0
0
η22 η32
0
...
0
0
...
0
0
...
η23 η33 η43
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
0
0
.
.
.
0
η(n−2)(n−1) η(n−1)(n−1)
0
0
7
7
7
0
7
7
7
7
0
7
7
7
.
7
7
7
.
7
7
7
7
.
7
7
ηn(n−1) 7
7
5
1
olmak üzere
2
3
6 A1 . A2 7
6
7
A=6
. . 7
6 .
7,
4
5
A3 . A4
2
3
0
6
6
R 3h
6
6
h 2ϕ2 dx
6
R 4h
6
6
2h 2ϕ3 dx
6
6
6
.
6
6
6
.
6
6
6
6
.
6
6 R (n+1)h
6
6
(n−1)h 2ϕn dx
6
6
0
6
B =6
6
6
0
6
6
R
3h
6
6
h −2ϕ2 dx
6
R 4h
6
6
2h −2ϕ3 dx
6
6
6
.
6
6
6
.
6
6
6
6
.
6
6 R
6 (n+1)h
6 (n−1)h −2ϕn dx
4
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
7
5
0
³eklinde bulunur. Dolaysyla
elde edilir. Elde edilen bu
³ekilde
kp
ler
V (x) =
Pn
cj
AC = B denklem sisteminin çözümünden C = [c1 , c2 , ..., cn , k1 , k2 , ..., kn ]
ler
U (x) =
p=1 kp ϕp (x)
Pn
j=1 cj ϕj (x)
te yerine konulursa
te yerine konulursa
51
V (x)
U (x),
benzer
yakla³k çözümleri elde
edilir. Nümerik çözüm sonucu
n
in farkl de§erleri için bulunan maksimum mutlak ha-
talar Tablo 3 te listelenmi³tir.
Table 3:
u(x)
ve
Problem
v(x)
3
için bulunan nümerik sonuçlar.
n
α = 2)
B-Spline (
u(x)
in max. mutlak hatalar
v(x)
in max. mutlak hatalar
21
3.4139e-015
1.8457e-015
21
4.1078e-015
6.2820e-016
α = 2)
21
9.4368e-016
1.1102e-015
α = 1.9)
21
3.4139e-012
1.8457e-11
α = 2)
Spline (
Galerkin (
Galerkin (
0
−0.05
−0.1
−0.15
−0.2
−0.25
0
0.2
0.4
ekil 4.5: Problem
3
0.6
te
u(x)
52
0.8
n = 41)
in gra§i (
1
0.25
0.2
0.15
0.1
0.05
0
0
0.2
0.4
ekil 4.6: Problem
3
0.6
te
v(x)
53
in gra§i (
0.8
n = 41)
1
Bölüm 5
SONUÇ
Tez çal³masnda
0 ≤ α ≤ 2 olmak üzere α. mertebeden kesirli türevli diferansiyel denk-
lem sistemleri ve kesirli ksmi türevli diferansiyel denklemler nümerik olarak çözüldü.
Bu denklemlerin çözümünde non-polynomial spline ve Galerkin metodu kullanld. Bu
yöntemlerin uygulanabilmesi için özellikle spline metodda
Mi
momentlerini elde etmek-
teki sorunu çözmek için Taylor açlm kullanld. Bulunan nümerik sonuçlar ile analitik
çözümler kar³la³trld. Analitik çözümler problemlerin do§al say türevli durumlarnn
çözümleri olmasna ra§men nümerik sonuçlar ile analitik çözümlerin farkndan do§an
mutlak hatalar, do§al say türevli problemlerin çözülmesiyle elde edilen mutlak hatalara
çok yakn çkt. Kesirli türevli difüzyon problemine spline metod uygulandktan sonra
metodun test edilmesi için nümerik da§lm analizi yapld. Bunun için problemin sürekli
ksm ile diskrit ksm kar³la³trlp gra§i çizildi. Çözümün tutarl olmas için e§rilerin
birbirini en az bir noktada kesmesi gerekiyordu, e§riler iki noktada kesi³ti§inden çözümün yaknsak ve tutarl oldu§u sonucuna varld. Çözülen tüm problemlerde elde edilen
nümerik sonuçlarn analitik çözümlerine yaknsad§ görülmü³tür. Bu metodlarn bu
tür problemler üzerinde uygulanabilirli§i ispatlanm³ oldu. Bundan sonra yüksek mertebeden kesirli türevli diferansiyel denklemler için de bu yöntemlerin uygulanabilirli§i
ara³trlabilir.
54
KAYNAKLAR
Georg Olms Verlasbuchhandlung, Hildes-
[1] Leibniz, G.W., Mathematische Schiften,
heim, 1962.
[2] Bai, Z. & Lü, H., Positive solutions for boundary value problems of nonlinear
fractional dierential equations,
J. Math. Anal. Appl. 311 (2005) 495-505.
[3] Chang, Y.K. & Nieto, J.J., Some new existence results for fractional dierential
inclusions with boundary conditions,
Math. Comput. Modelling
49 (2009) 605-609.
[4] Deng, W., Numerical algorithm for the time fractional Fokker-Planck equation,
J.
Comput. Phys. 227 (2007) 1510-1522.
[5] Ibrahim, R.W. & Darus, M., Subordination and superordination for univalent solutions for fractional dierential equations,
J. Math. Anal. Appl. 345 (2008) 871-879.
[6] Ladaci, S. & Loiseau, J.L. & Charef, A., Fractional order adaptive high-gain controllers for a class of linear systems,
Commun. Nonlinear Sci. Numer. Simul.
13
(2008) 707-714.
[7] Rida, S.Z. & El-Sherbiny, H.M. & Arafa, A.A.M., On the solution of the fractional
nonlinear Schrödinger equation,
Phys. Lett. A 372 (2008) 553-558.
[8] Yang, A. & Ge, W., Positive solutions for boundary value problems of N-Dimension
nonlinear fractional dierential system,
Bound. Value Probl. (2008)
15 pages. Ar-
ticle ID 437453.
[9] Su, X. & Zhang, S., Solutions to boundary-value problems for nonlinear dierential
equations of fractional order,
Electron. J. Dierential Equations
26(2009) 115.
[10] Ahmad, B., & Nieto, J.J., Existence results for nonlinear boundary value problems of fractional integrodierential equations with integral boundary conditions,
Bound. Value Probl. (2009) 11 pages. Article ID 708576.
[11] Ahmad, B., & Nieto, J.J., Existence of solutions for nonlocal boundary value problems of higher-order nonlinear fractional dierential equations,
(2009) 9 pages. Article ID 494720.
55
Abstr. Appl. Anal.
[12] Bai, C. & Fang, J., The existence of a positive solution for a singular coupled system
of nonlinear fractional dierential equations,
Appl. Math. Comput. 150 (2004) 611-
621.
[13] Chen, Y. & An, H., Numerical solutions of coupled Burgers equations with time
and space fractional derivatives,
Appl. Math. Comput. 200 (2008) 87-95.
[14] Gaychuk, V. & Datsko, B., & Meleshko, V., Mathematical modeling of time fractional reaction-diusion systems,
J. Comput. Appl. Math. 220 (2008) 215-225.
[15] Gejji, V.D., Positive solutions of a system of non-autonomous fractional dierential
equations,
J. Math. Anal. Appl. 302 (2005) 56-64.
[16] Lazarevic, M.P., Finite time stability analysis of
time-delay systems,
P Dα
fractional control of robotic
Mech. Res. Comm. 33 (2006) 269-279.
[17] Su, X., Boundary value problem for a coupled system of nonlinear fractional dierential equations,
Appl. Math. Lett. 22 (2009) 64-69.
[18] Gaychuk, V. & Datsko, B., & Meleshko, V. & Blackmore, D., Analysis of the solutions of coupled nonlinear fractional reaction-diusion equations,
Fractals
Chaos Solitons
41 (2009) 1095-1104.
[19] Liouville, J., Memoire sur quelques question de geometrie et de mecanique et sur
un nouveau genre de calcul pour resudre ces question,
J. Ecole Polytech.,
1832,
13(21) 1-69.
[20] Riemann, B., Versuch einer allgemeinen auasung der integration und dierentiation,
Gesammelte Werke, 1876, 62.
[21] Grünwald, A. K., Uber "begrenzte" derivationen und deren anwendung,
Z. Angew.
Math. Phys., 1867, 12 441-480.
[22] Letnikov, A. V., Theory of dierentiation with an arbitrary index,
Mat. Sb., 1868,
3 1-66.
[23] Caputo, M., Linear models of dissipation whose Q is almost frequency independent,
Anna, di Geos., 1966, 19 3-393.
[24] Caputo, M., Linear models of dissipation whose Q is almost frequency independent,
Part II,
Geophys. J. Roy. Astron. Soc. 13(1967)529-539.
56
[25] Caputo, M., Elasticita e Dissipazione, Zanichelli, Bologna, 1969.
Kyungpook Math. J.,
[26] El-Sayed, A.M.A., Fractional dierential equations,
vol. 28,
no. 2, (1988) 119-122.
[27] El-Sayed, A.M.A., Fractional derivative and fractional dierential equations,
Bull
Fac. Sci., Alexandria Univ., 28 (1988) 18-22.
[28] El-Sayed,
A.M.A., On the fractional dierential equations,
Applied Math. and
Comp., 49 (1992) 2-3.
[29] El-Sayed, A.M.A., Linear dierential equations of fractional order,
Applied Math.
and Comp., 55 (1993) 1-12.
[30] El-Sayed, A.M.A., Multivalued fractional dierential equations,
Applied Math. and
Comp., 80 (1994) 1-11.
[31] El-Sayed, A.M.A., Fractional order evolution equations,
J. of Frac. Calculus,
7
(1995) 89-100.
[32] Erdelyi, A., Fractional integrals of generalized functions,
J. Austral. Math. Soc.,
14(1),30-32 (1972)
[33] Riesz, M., L'integral de Riemann-Liouville et le probleme de Cauchy,
Acta Math.,
81, 1-223 (1949)
[34] Hadamard, J., Essai sur letude des fonctions donnees par leur developpement de
Taylor,
J. Math. Pures Appl., 8(Ser. 4), 101-186, (1892)
[35] Samko S.G. & Kilbas, A.A. & Marichev, O.I., Fractional Integrals and Derivatives:
Theory and Applications,
Gordon and Beach Science Publishers, Switzerland, 1993.
[36] Rashidinia, J. & Mohammadi R., Non-polynomial cubic spline methods for the
solution of parabolic equations,
International Journal of Computer Mathematics,
85 (2008) 843-850.
[37] Butzer, P. L. & Westphal, U., An introduction to fractional calculus.,
World Sci.
Publishing, 2000, 1-85.
[38] Kilbas, A.A. & Srivastava, Hari M.& Trujillo, Juan J., Theory and Applications of
Fractional Dierential Equations,
Elsevier, 2006.
57
[39] Miller, K. S. & Ross, B., An Introduction to the Fractional Calculus and Fractional
Dierential Equations,
Wiley and Sons, New York, 1993.
[40] oss, B., The development of fractional calculus: 1695-1900,
Historia Math., 4, (1977)
75-89.
[41] Miller, K. S., Fractional dierential equations,
J. Fract. Gale, 3, (1993) 49-57.
[42] Miller, K. S., Derivatives of non-integer order,
Math. Mag., 68(2), (1995) 183-192.
[43] Oldham, K. B. & Spanier, J., The Fractional Calculus,
Academic Press, New York,
1974.
[44] Oldham, K. B. & Spanier, J., Fractional calculus and its applications,
Bull. Inst.
Politehn. Iasi. Sect. I, 24(28)(3-4), (1978) 29-34.
[45] Podlubny, I., Fractional Dierential Equations,
Academic Press, San Diego, 1999.
[46] Ross, B.(Ed.), Fractional Calculus and Its Applications: Proceedings of the International Conference, New Haven, June 1974,
Springer Verlag, New York, 1974.
[47] Podlubny I. &Dorcak L.&Kostial I., On fractional derivatives, fractional-order dynamic systems and PID-controllers, Decision and Control,1997,
Proceedings of the
36th IEEE conference on Volume 5,10-12 Dec. 1997 ,4985-4990.
[48] Ray, S.S. & Chaudhuri, K.S. & Bera, R.K., Application of modied decomposition
method for the analytical solution of space fractional diusion equation,
Applied
Mathematics and Computation, 196, 1, 2008, 294-302.
[49] Ray, S.S., Analytical solution for the space fractional diusion equation by two-
Communications in Nonlinear Science and
step Adomian Decomposition Method,
Numerical Simulation, 14, 4, 2009, 1295-1306.
[50] Goreno, R. & Mainardi, F., Fractional calculus and stable probability distributions,
Arch. Mech. 50(1998)377-388.
[51] Jocelyn, S. & Om Prakash, A.& Tenreiro Machado, J.A., Advances in Fractional
Calculus: Theoretical Developments and Applications in Physics and Engineering,
Springer
Netherlands, 2007.
[52] Changpin Li &Weihua Deng, Remarks on fractional derivatives,
tics and Computation, 187 2(2007) 777-784.
58
Applied Mathema-
[53] J. Lu, Variational iteration method for solving a nonlinear system of second-order
Computers and Mathematics with Applications 54 (2007)
boundary value problems,
1133-1138.
[54] Caglar, H. & Caglar, N., B-spline method for solving linear system of second-order
boundary value problems,
Computers and Mathematics with Applications
(2008),
doi:10.1016/j.camwa.2008.09.033.
[55] Saadatmandi,
homotopy
dary
A.
&
Dehghan,
perturbation
value
problems,
method
M.
&
Eftekhari,
for
non-linear
A.
,
system
Application
of
of
second-order
Nonlinear Analysis: Real World Applications
He's
boun-
(2008),
doi:10.1016/j.nonrwa.2008.02.032.
[56] Bataineh, A.S. & Noorani, M.S.M. & Hashim, I., Modied homotopy analysis method for solving systems of second-order BVPs,
ence and Numerical Simulation
[57] Siraj-ul-Islam
&
Noor,
M.A.
Communications in Nonlinear Sci-
14 (2009) 430-442.
&
Tirmizi,
I.A.
&
Khan,
M.A.,
Quadratic
non-
polynomial spline approach to the solution of a system of second-order boundaryvalue problems,
Applied Mathematics and Computation
179 (2006) 153-160.
[58] Rashidinia, J. & Jalilian, R. & Kazemi, V., Spline methods for the solutions of
hyperbolic equations,
Applied Mathematics and Computation
190 (2007) 882-886.
[59] J. Rashidinia & R. Mohammadi & R. Jalilian, The numerical solution of non-linear
singular boundary value problems arising in physiology,
Computation
Applied Mathematics and
185 (2007) 360-367.
[60] J. Rashidinia & R. Mohammadi & R. Jalilian, Spline solution of non-linear singular boundary value problems,
International Journal of Computer Mathematics
85
(2008) 39-52.
[61] Caglar, H. & Caglar, N., Solution of fth order boundary value problems by using
local polynomial regression,
Appl. Math. Comput., 2007; vol.186:952-956.
[62] Caglar, H. & Caglar, N., Local polynomial regression method for the solution of
fractional diusion equation
59
[63] Caglar, H. & Caglar, N., Numerical solution of integral equations by using local
polynomial regression,
Journal Of Comp. Analysis and Appl. , 2008; vol.10, No.2,
187-195.
[64] Caglar, H. & Caglar, N. & Akkoyunlu, C. , Non-polynomial spline method of a nonlinear system of second-order boundary value problems,
Journal of Computational
Analysis and Applications, (2010) Vol.12, No.2, 544-559.
[65] Cui, M., Compact nite dierence method for the fractional diusion equation,
Journal of Computational Physics, 228, 2009, 7792-7804.
[66] Wangb, H. & Wangb, K. & Sircar, T. , A direct O(Nlog2N) nite dierence method
for fractional diusion equations,
Journal of Computational Physics, 2010
[67] Tadjeran, C. & Meerschaert, M.M. & Scheer, H.P., A second-order accurate numerical approximation for the fractional diusion equation,
Journal of Computati-
onal Physics, 213, 2006, 205-213.
[68] Schober, C.M. & Wlodarczyk, T.H., Dispersive properties of multisympletictic integraltors,
J. Comput. Phys., 227:5090-5104, 2008.
[69] Schober, C.M. & Wlodarczyk, T.H., Dispersion, group velocity and multisymplectic
discretizations,
Math. Comput. Simulation, 80:741-751, 2009.
[70] Thomas, J.W., Numerical Partial Dierential Equations: Finite Dierence Methods,
Springer
1995.
[71] Trefethen, L.N., Finite Dierence and Spectral Methods for Ordinary and Partial
Dierential Equations,
Cornell University, 1996.
[72] Wyss, W., The fractional diusion equation,
J. Math. Phys., 27(11), (1986) 2782-
2785.
[73] Vazquez, L., Fractional diusion equations with internal degrees of freedom,
J.
Comp. Math., 21(4), (2003) 491-494.
[74] Tu, S.-T. & Chyan, D.-K. & Srivastava, H. M., Some families of ordinary and partial
fractional dierintegral equations,
Integral Transform. Spec. Fund., 11, (2001) 291-
302.
60
[75] Tu, S.-T. & Lin, S.-D. & Srivastava, H. M., Solutions of a class of ordinary and
partial dierential equations via fractional calculus,
J. Fract. Calc, 18, (2000) 103-
110.
[76] Stankovic, B., Dierential equations with fractional derivatives and nonconstant
coecients,
Integral Transform. Spec. Fund., 6(13), (2002) 489-496.
[77] Stankovic, B., A system of partial dierential equations with fractional derivatives,
Math. Vesnik, 3-4(54), (2002) 187-194.
[78] Srivastava, H. M., Fractional calculus and its applications,
Cubo Math. Ed., (51),
(2003) 33-48.
[79] Schneider, W. R. & Wyss, W., Fractional diusion and wave equation,
J. Math.
Phys., 30(1), (1989) 134-144.
[80] Nishimoto, K., Fractional Calculus: Integration and Dierentiation of Arbitrary
Order, Vols. I-V,
Descartes Press, Koriyama, 1984, 1989, 1991, and 1996.
[81] Momani, S. & Al-Khaled, K., Numerical solutions for systems of fractional dierential equations by the decomposition method,
Appl. Math. Comp., 16(23), (2005)
1351-1365.
[82] Matignon, D. & Montseny, G., Fractional Dierential Systems: Models, Methods,
and Applications,
vol. 5 of ESAIM Proceedings, SMAI, Paris, 1998.
[83] Kiryakova, V. S., Generalized Fractional Calculus and Applications,
Pitman Res.
Notes in Math., Wiley and Sons, New York, 301 (1994).
[84] McBride, A. C., Fractional Calculus and Integral Transforms of Generalized Functions,
Research Notes in Math., Pitman, London, 31 (1979).
[85] Butzer, P. L., Kilbas, A. A., and Trujillo, J. J., Compositions of Hadamard- type
fractional integration operators and the semigroup property,
J. Math. Anal. Appl.,
26(92), (2002) 387-400.
[86] Butzer, P. L., Kilbas, A. A., and Trujillo, J. J., Fractional calculus in the Mellin
setting and Hadamard-type fractional integrals,
1-27.
61
J. Math. Anal. Appl. 26(91), (2002)
[87] Butzer, P. L., Kilbas, A. A., and Trujillo, J. J., Mellin transform and integration by
parts for Hadamard-type fractional integrals,
J. Math. Anal. Appl. 270(1), (2002)
1-15.
[88] Kilbas, A. A., Hadamard-type fractional calculus,
J. Korean Math. Soc.,
38(6),
(2001) 1191-1204.
[89] Kilbas, A. A. and Titjura, A. A., Hadamard-type fractional integrals and derivatives,
Trudy Inst. Mat. Minsk, 11, (2002) 79-87.
[90] Bazhlekova, E.G., Duhamel-type representation of the solutions of nonlocal boundary value problems for the fractional diusion-wave equation,
Proc. of the 2nd
Int. Workshop, Bulgarian Academy of Sciences, Soa, 1998, 32-40.
[91] Chechkin, A.V. & Goreno, R. & Sokolov, I.M., Retarding subdiusion and accelerating superdiusion governed by distributed order fractional diusion equations,
Phys. Rev. E
66 (2002) 1-7.
[92] Chechkin, A.V. & Goreno, R. & Sokolov, I.M. & Gonchar, V.Yu., Distributed
order time fractional diusion equation,
Fract. Calc. Appl. Anal. 6 (2003) 259-279.
[93] Chechkin, A.V. & Gorenzo, R. & Sokolov, I.M., Fractional diusion in inhomogeneous media,
J. Phys. A 38 (2005) 679-684.
[94] J. Cheng, J. Nakagawa, M. Yamamoto, T. Yamazaki, Uniqueness in an inverse
problem for a one-dimensional fractional diusion equation,
Inverse Problems
25
(2009) 16 .
[95] C.F.M. Coimbra, Mechanics with variable-order dierential operators,
Ann. Phys.
12 (2003) 692-703.
[96] V. Daftardar-Gejji & S. Bhalekar, Boundary value problems for multi-term fractional dierential equations,
J. Math. Anal. Appl. 345 (2008) 754-765.
[97] J.L.A. Dubbeldam & A. Milchev & V.G. Rostiashvili & T.A. Vilgis, Polymer translocation through a nanopore: A showcase of anomalous diusion,
Phys. Rev. E
76
(2007) 010801 (R).
[98] S.D. Eidelman & A.N. Kochubei, Cauchy problem for fractional diusion equations,
J. Dierential Equations
199 (2004) 211-255.
62
[99] A. Freed & K. Diethelm & Yu. Luchko, Fractional-Order Viscoelasticity (FOV):
Constitutive Development Using the Fractional Calculus,
NASA's Glenn Research
Center, Ohio, 2002.
[100] R. Goreno & Yu. Luchko & S. Umarov, On the Cauchy and multi-point problems
for partial pseudo-dierential equations of fractional order,
Fract. Calc. Appl. Anal.
3 (2000) 249-277.
[101] R. Goreno & F. Mainardi, Random walk models for space-fractional diusion
processes,
Fract. Calc. Appl. Anal. 1 (1998) 167-191.
[102] R. Hilfer (Ed.), Applications of Fractional Calculus in Physics, World Scientic,
Singapore, 2000.
[103] A.N. Kochubei, Distributed order calculus and equations of ultraslow diusion,
J. Math. Anal. Appl. 340 (2008) 252-281.
[104] A.N. Kochubei, A Cauchy problem for evolution equations of fractional order,
Dier. Equ. 25 (1989) 967-974.
[105] C.F. Lorenzo & T.T. Hartley, Variable order and distributed order fractional
operators,
Nonlinear Dynam. 29 (2002) 57-98.
[106] Yu. Luchko & R. Goreno, An operational method for solving fractional dierential equations with the Caputo derivatives,
Acta Math. Vietnam. 24 (1999) 207-233.
[107] Yu. Luchko, Operational method in fractional calculus,
Fract. Calc. Appl. Anal.
2 (1999) 463-489.
[108] Yu. Luchko, Maximum principle for the generalized time-fractional diusion equation,
J. Math. Anal. Appl. 351 (2009) 218-223.
[109] Yu. Luchko, Some uniqueness and existence results for the initial-boundary-value
problems for the generalized time-fractional diusion equation,
Comput. Math.
Appl. 59 (2010) 1766-1772.
[110] Yu. Luchko, Boundary value problems for the generalized time-fractional diusion
equation of distributed order,
Fract. Calc. Appl. Anal. 12 (2009) 409-422.
[111] F. Mainardi, Fractional relaxation-oscillation and fractional diusion-wave phenomena,
Chaos Solitons Fractals
7 (1996) 1461-1477.
63
[112] F. Mainardi & M. Tomirotti, Seismic pulse propagation with constant Q and
stable probability distributions,
Ann. Geos. 40 (1997) 1311-1328.
[113] F. Mainardi & Yu. Luchko & G. Pagnini, The fundamental solution of the spacetime fractional diusion equation,
Fract. Calc. Appl. Anal. 4 (2001) 153-192.
[114] Meerschaert, M.M. & Scheer, H.P., Stochastic model for ultraslow diusion,
Stochastic Process. Appl. 116 (2006) 1215-1235.
[115] Meerschaert, M.M. & Nane, E. & Vellaisamy, P., Fractional Cauchy problems in
bounded domains,
Ann. Probab. 37 (2009) 979-1007.
[116] Metzler, R. & Klafter, J., The random walk's guide to anomalous diusion: a
fractional dynamics approach,
Phys. Rep. 339 (2000) 1-77.
[117] Metzler, R. & Klafter, J., Boundary value problems for fractional diusion equations,
Phys. A 278 (2000) 107-125.
[118] Naber, M., Distributed order fractional subdiusion,
Fractals
12 (2004) 23-32.
[119] Pedro, H.T.C. & Kobayashi, M.H. & Pereira, J.M.C. & Coimbra, C.F.M., Variable
order modelling of diusive-convective eects on the oscillatory ow past a sphere,
J. Vib. Control
14 (2008) 1659-1672.
[120] Pskhu, A.V., Partial Dierential Equations of Fractional Order, Nauka, Moscow,
2005.
[121] Schneider, W.R. & Wyss, W., Fractional diusion and wave equations,
J. Math.
Phys. 30 (1989) 134-144.
[122] Sokolov, I.M. & Chechkin, A.V. & Klafter, J., Distributed-order fractional kinetics,
Acta Phys. Polon. B
35 (2004) 1323-1341.
[123] Uchaikin, V.V., Method of Fractional Derivatives, Artishok, Ul'janovsk, 2008.
[124] Umarov, S. & Gorenzo, R., Cauchy and nonlocal multi-point problems for distributed order pseudo-dierential equations,
Z. Anal. Anwend. 24 (2005) 449-466.
[125] Vladimirov, V.S., Equations of Mathematical Physics, Nauka, Moscow, 1971.
[126] Voroshilov, A.A. & Kilbas, A.A., The Cauchy problem for the diusion-wave
equation with the Caputo partial derivative,
64
Dier. Equ. 42 (2006) 638-649.
[127] Zacher,
R.,
Boundedness
of
weak
solutions
to
evolutionary
dierential equations with discontinuous coecients,
partial
integro-
J. Math. Anal. Appl.
348
(2008) 137-149.
[128] Atkinson, K.E., An introduction to Numercal Analysis,
John Wiley & Sons. Inc.,
USA (1988).
[129] Marchuk, G.I., Methods of Numerical Mathematics, second ed.,
Springer- Verlag,
New York, (1982).
[130] Ahlberg, J.H. & Nilson, E.N. & Walsh, J.L., The Theory of Splines and Their
Applications,
Academic Press, New York, 1967.
[131] Greville, T.N.E., Introduction to spline functions, in: Theory and Application of
Spline Functions,
Academic Press, New York, 1969.
[132] Micula, G. & Micula, S., Hand Book of Splines,
Kluwer Academic Publishers,
1999.
[133] Prenter, P.M., Splines and Variational Methods,
John Wiley & Sons INC., 1975.
[134] De Boor, C., The method of projections as applied to the numerical solution of
two point boundary value problems using cubic splines, Ph.D. Thesis, University
of Michigan, 1966.
[135] De Boor, C., On uniform approximations by splines,
J. Approx. Theory
1 (1968)
219-235.
[136] De Boor, C., A practical guide to splines,
Springer-Verlag, New York
(1978).
[137] Loscalzo, F.R. & Talbot, T.D., Spline function approximations for solution of
ordinary dierential equations,
Bull. Amer. Math. Soc. 73 (1967) 438-442.
[138] Loscalzo, F.R. & Talbot, T.D., Spline function approximations for solution of
ordinary dierential equations,
SIAM J. Numer. Anal. 4 (1967) 433-445.
[139] Bickley, W.G., Piecewise cubic interpolation and two point boundary value problems,
Comput. J. 11 (1968) 206-208.
[140] Fyfe, D.J., The use of cubic splines in the solution of two point boundary- value
problems,
Comput. J. 12 (1969) 188-192.
65
[141] Fyfe, D.J., Linear dependence relations connecting equal interval Nth degree splines and their derivatives,
J. Inst. Math. Appl. 7 (1971) 398-406.
[142] Albasiny, E.L. & Hoskins, W.D. Cubic spline solutions to two point boundary
value problems,
Comput. J. 12 (1969) 151-153.
[143] Sakai, M., Piecewise cubic interpolation and two point boundary value problems,
Publ. RIMS., Kyoto Univ. 7 (1972) 345-362.
[144] Sakai, M., Numerical solution of boundary-value problems for second order functional dierential equations by the use of cubic splines,
Mem. Fac. Sci.,
Kyushu
Univ. 29 (1975) 113-122.
[145] Sakai, M., Two sided quintic spline approximations for two point boundary-value
problems,
Rep. Fac. Sci.,
Kagoshima Univ., (Math., Phys., Chem.) (10) (1977)
1-17.
[146] Russell, R.D. & Shampine, L.F., A collocation method for boundary value problems,
Numer. Math. 19 (1972) 1-28.
[147] Micula, G., Approximation solution of the dierential equation with spline functions,
Math. Comput. 27 (1973) 807-816.
[148] Rubin, S.G. & Khosla, P.K., Higher order numerical solution using cubic splines,
AIAA J. 14 (1976) 851-858.
[149] Rubin, S.G. & Graves Jr., R.A., Viscous ow solutions with a cubic spline approximation,
Computers and Fluids
3 (1975) 1-36.
[150] Daniel, J.W. & Swartz, B.K., Extrapolated collocation for two point boundary
value problems using cubic splines,
J. Inst. Math. Appl. 16 (1975) 161-174.
[151] Archer, An O(h4) cubic spline collocation method for quasilinear parabolic equations,
SIAM J. Numer. Anal. 14 (1977) 620-637.
[152] Patricio, F., A numerical method for solving initial value problems with spline
functions,
BIT
19 (1979) 489-494.
[153] Patricio, F., Cubic spline functions and initial value problems,
342-347.
66
BIT
18 (1978)
[154] Tewarson, R.P., On the use of splines for the numerical solution of non linear two
point boundary value problems,
BIT
20 (1980) 223-232.
[155] Tewarson, R.P. & Zhang, Y., Solution of two point boundary value problems using
splines,
Int.J. Numer. Method Eng. 23 (1986) 707-710.
[156] Usmani, R.A., Spline solutions for nonlinear two point boundary value problems,
Intern. J.Math. and Math. Sci. 3 (1980) 151-167.
[157] Usmani, R.A. & Sakai, M., A connection between quartic spline solution and
Numerov solution of a boundary value problem,
Int. J. Comput. Math. 26 (1989)
263-273.
[158] Usmani, R.A. & Warsi, S.A., Quintic spline solution of boundary value problems,
Comput. Math. Appl. 6 (1980) 197-203.
[159] Jain, M.K. & Aziz, T., Numerical solution of sti and convection-diusion equations using adaptive spline function approximation,
Appl. Math. Model. 7 (1983)
57-63.
[160] Jain, M.K. & Aziz, T., Spline function approximation for dierential equations,
Comput. Method Appl. Mech. Eng. 26 (1981) 129-143.
[161] Jain, M.K. & Aziz, T., Cubic spline solution of two-point boundary-value problems
with signicant rst derivatives,
Comput. Method Appl. Mech. Eng. 39 (1983) 83-
91.
[162] Surla, K. & Herceg, D. & Cvetkovic, L., A family of exponential spline dierence
schemes,
Univ. u.Novom Sadu, Zb. Rad. Prirod. Mat. Fak. Ser. Mat. 19 (2) (1991)
12-23.
[163] Surla, K. & Stojanovic, M. Solving singularly perturbed boundary value problems
by spline in tension,
J. Comput. Appl. Math. 24 (1988) 355-363.
[164] Surla, K. & Uzelec, Z. Some uniformly convergent spline dierence schemes for
singularly perturbed boundary-value problems,
IMA J. Numer. Anal.
10 (1990)
209-222.
[165] Surla, K. & Vukoslavcevic, V., A spline dierence scheme for boundary -value
problems with a small parameter,
Univ. u. Novom Sadu, Zb. Rad. Zb. Rad. Prirod.
Mat. Fak. Ser. Mat. 25 (2) (1995) 159-166.
67
[166] Iyengar,
S.R.K.
&
Jain,
boundary-value problems,
P.,
Spline
nite
dierence
methods
for
two-point
Numer. Math. 50 (1987) 363-387.
[167] Chawla, M. & Subramanian, R., A new fourth order cubic spline method for
non-linear two point boundary value problems,
Int. J. Comput. Math.
22 (1987)
321-341.
[168] Chawla, M. & Subramanian, R., A fourth order spline method for singular two
point boundary value problems,
J. Comput. Appl. Math. 21 (1988) 189-202.
[169] Chawla, M. & Subramanian, R., High accuracy quintic spline solution of fourth
order two point boundary value problems,
Int. J. Comput. Math. 31 (1989) 87-94.
[170] Irodotou-Ellina, M. & Houstis, E.N., An O(h6) quintic spline collocation method
for singular two-point boundary-value problems,
BIT
28 (1988) 288-301.
[171] Fairweather, G. & Meade, D., A survey of spline collocation methods for the
numerical solution of dierential equations, in: Mathematics for Large Scale Com-
Lecture Notes in Pure and Applied Maths
puting, in: J.C. Diaz (Ed.),
120, Marcel
Dekker, New York, 1989, 297-341.
[172] Momani, S. & Odibat, Z., Homotopy perturbation method for nonlinear partial
dierential equations of fractional order,
Phys. Lett. A 365 (5-6) (2007) 345-350.
[173] Momani, S. & Odibat, Z., Modied homotopy perturbation method: application
to quadratic Riccati dierential equation of fractional order,
Chaos Soliton. Fract.
36 (1) (2008) 167-174.
[174] Momani, S. & Al-Khaled, Numerical solutions for systems of fractional dierential
equations by the decomposition method,
Appl. Math. Comput. 162 (3) (2005) 1351-
1365.
[175] Jafari, H. & Gejji, V.D., Solving a system of nonlinear fractional dierential equations using Adomain decomposition,
Appl. Math. Comput. 196 (2006) 644-651.
[176] Lensic, D., The decomposition method for initial value problems,
Appl. Math.
Comput. 181 (2006) 206-213.
[177] Daftardar-Gejji, V. & Jafari, H., Adomian decomposition: a tool for solving a
system of fractional dierential equations,
508-518.
68
J. Math. Anal. Appl.
301 (2) (2005)
[178] Momani, S. & Odibat, Z., Application of variational iteration method to nonlinear
dierential equations of fractional order,
Int. J. Nonlinear Sci. Numer. Simulat. 1
(7) (2006) 15-27.
[179] Daftardar-Gejji, V. & Jafari, H., An iterative method for solving nonlinear functional equations,
J. Math. Anal. Appl. 316 (2006) 753-763.
[180] Yulita Mollig, R. & Noorani, M.S.M. & Hashim I., Variational iteration method
for fractional heat- and wave-like equations,
Nonlinear Analysis: Real World Appl.
10 (2009) 1854-1869.
[181] Liao, S.J., The Proposed Homotopy Analysis Technique for the Solution of Nonlinear Problems, Ph.D. Thesis, Shanghai Jiao Tong University, 1992.
[182] Liao, S.J., On the homotopy analysis method for nonlinear problems,
Appl. Math.
Comput. 147 (2004) 499-513.
[183] Liao, S.J., Comparison between the homotopy analysis method and homotopy
perturbation method,
Appl. Math. Comput. 169 (2005) 1186-1194.
[184] Song, L. & Zhang, H. Application of homotopy analysis method to fractional
KdV-Burgers-Kuramoto equation,
Phys. Lett. A 367 (1-2) (2007) 88-94.
[185] Zurigat, M. & Momani, S. & Odibat, Z. & Alawneh, A., The homotopy analysis method for handling systems of fractional dierential equations,
Modelling
34 (2010) 24-35.
69
Appl. Math.
ÖZGEÇM
Mehmet Fatih UÇAR, 1 Ocak 1982 de Erzincan'da do§mu³tur. Lise e§itimini Erzincan
Nevzat Ayaz Fen Lisesi'nde tamamladktan sonra 2001 ylnda stanbul Kültür Üniversitesi Matematik-Bilgisayar Bölümü'ne kaydolmu³tur. 2003 ylnda stanbul Kültür
Üniversitesi ³letme Bölümü'ne (çift anadan program) kaydolmu³tur ve 2005 te her
iki bölümden de mezun olmu³tur. Mezuniyetinin ardndan stanbul Kültür Üniversitesi
Matematik-bilgisayar Bölümü'nde Ara³trma Görevlisi olarak göreve ba³lam³tr, ayn
zamanda yüksek lisans ö§renimine de ba³lam³tr ve 2007 de mezun olup ayn üniversitede Doktora ö§renimine ba³lam³tr.
70
© Copyright 2026 Paperzz