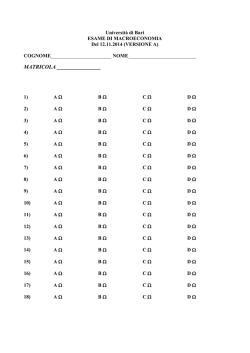
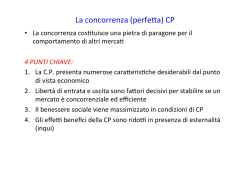
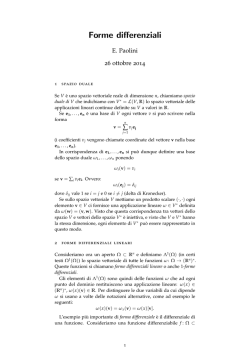
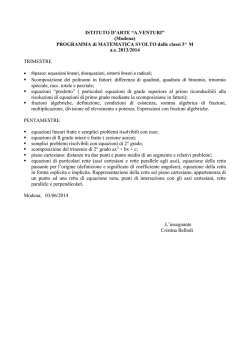
Breve storia della teoria delle curve algebriche piane Enrico Rogora 15 dicembre 2014 Generalit` a Una curva algebrica piana affine `e il luogo degli zeri, nel piano affine complesso, di un polinomio in due variabili f (x, y). Una curva algebrica piana proiettiva `e il luogo degli zeri, nel piano proiettivo complesso, di un polinomio omogeneo in tre variabili F (x0 , x1 , x2 ). Il legame tra una curva affine e la corrispondente curva proiettiva `e dato algebricamente dagli operatori di omogeneizzazione e disomogeneizzazione. L’omogeneizzazione del polinomio f (x, y) si ottiene operando la sostituzione x = x1 /x0 e y = x2 /x0 e moltiplicando per la pi` u bassa potenza di x0 che permette di eliminare i denominatori. La disomogeneizzazione del polinomio F (x0 , x1 , x2 ) si ottiene con la sostituzione x0 = 1, x1 = x, x2 = y. Per esempio, se f (x, y) = x3 −y 2 , la sua omogeneizzazione H(f ) si ottiene da (x1 /x0 )3 − (x2 /x0 )2 moltiplicando per x30 , ottenendo quindi H(f ) = x31 − x22 x0 . Mentre per ogni polinomio f in due variabili, D(H(f )) = f , si ha che H(D(F )) = F solo se F non `e divisibile per una potenza di x0 . Geometricamente, l’omogeneizzazione di una curva affine consiste nell’aggiungere i suoi punti all’infinito. Per esempio, alla parabola y = x2 , che omogeneizzata diventa x0 x2 = x21 viene aggiunto il punto all’infinito (0, 0, 1) che rappresenta la direzione dell’asse della parabola, mentre all’iperbole xy = 1, di equazione omogenea x1 x2 = x20 vengono aggiunti i punti all’infinito (0, 1, 0) e (0, 0, 1) che rappresentano le direzione dei due asintoti. Una curva si dice riducibile se il corrispondente polinomio si pu`o scrivere come prodotto di due polinomi di grado maggiore di zero. Per esempio la curva di equazione xy = 0 `e riducibile in due rette di equazioni rispettivamente x = 0 e y = 0. 1 Ordine di una curva. L’ ordine di una curva `e il grado del corrispondente polinomio. La curva si dice riducibile se il corrispondente polinomio si pu`o scrivere come prodotto di due polinomi di grado maggiore di zero. L’ordine di una curva `e un invariate per trasformazioni proiettive. L’idea di classificare le curve in funzione del loro ordine si deve a Descartes, che introdusse anche i metodi della geometria analitica e lo strumento della derivazione dei polinomi per affrontare il loro studio. Il punto di vista di Descartes rivoluzion`o la geometria. Egli ne ridefin`ı gli oggetti, sostituendo alle curve costruibili con procedimenti geometrici (riga e compasso) o meccanici le curve definite da una equazione. Oltre a rendere accessibile all’indagine geometrica un nuovo insieme di oggetti, il punto di vista di Descartes apr`ı alla geometria tutta una serie di problemi prima inconcepibili. Per esempio il problema di classificare le curve di dato ordine o di determinare il grado di curve che risolvono specifici problemi geometrici, per esempio il problema di Pappo (cfr, [1]). Il primo che affront`o sistematicamente lo studio delle curve algebriche piane di ordine maggiore di due fu per`o Newton, che nel 1667-68 fece uno studio dettagliato delle curve di terzo grado o cubiche. Anche Mc Laurin, Taylor, Eulero, Cramer e Puiseux se ne occuparono, analizzando in particolare le propriet`a locali di una curva, cio`e le approssimazioni con parabole occupatrici di ogni ordine e analizzando le singolarit`a. Il punto di vista di questi autori era quello di considerare la geometria delle curve come un capitolo del Calcolo differenziale. Con Poncelet si assiste al ritorno del punto di vista geometrico sintetico nello studio delle curve piane. Poncelet introdusse l’idea di polare, di punti all’infinito di curva duale e pose alcuni problemi fondamentali come quello del calcolo della classe di una curva e del numero dei flessi. Un punto di svolta fondamentale nello studio delle curve algebriche piane si ebbe con il lavoro di Pl¨ ucker, che svilupp`o un approccio geometrico utilizzando gli strumenti del calcolo differenziale. L’ordine di una curva algebrica si pu`o definire geometricamente come il numero delle intersezioni della curva con una retta generica del suo piano, pur di considerare le soluzioni complesse e di contare opportunamente le molteplicit`a di intersezione nei punti di tangenza e nei punti singolari della curva, cio`e nei punti delle curva dove si annullano le derivate parziali. Infatti. ricavando una variabile dall’equazione della retta e sostituendola nell’equazione (omogenea) della curva otteniamo un’equazione (omogenea) in una (due) variabili di grado n che, per il teorema fondamentale dell’algebra, ammette n radici, in generale distinte. Facendo variare con continuit`a la retta pu`o succedere che alcune di queste radici venga a coincidere. Un punto in cui vengono a coincidere r intersezioni con una retta si dice punto r-plo. 2 Il teorema di Bezout Un risultato generale e utilissimo nella teoria delle curve piane `e il teorema di Bezout che afferma che il numero di intersezioni di una curva di grado n con una curva di grado m che non abbiano componenti in comune `e sempre n × m, pur di considerare anche le intersezioni complesse ed assegnare ad ogni punto di intersezione la corretta molteplicit`a, che `e pari ad 1 solo quando il punto di intersezione `e semplice per entrambe le curve e le rette tangenti alle due curve nel punto sono distinte. Intersezione di due curve di grado due. Figura 1: quattro punti semplici, tangenti distinte, quattro intesezioni. Figura 2: due punti semplici, tangenti coincidenti, molteplicit`a di interezione due in ogni punto, ancora quattro intersezioni. Figura 3: nessuna intersezione reale ma ancora quattro intersezioni complesse. Punti semplici e punti multipli. Un punto P = (α, β, γ) della curva proiettiva di equazione omogenea F (x0 , x1 , x2 ) = 0 si dice regolare o semplice ∂F `e non nulla in P 1 . Se si annullano tutte se almeno una delle tre derivate ∂x i tre il punto si dice singolare o multiplo. In un punto regolare la retta tangente ha equazione ∂F ∂F ∂F x0 (P ) + x1 (P ) + x2 (P ) = 0. ∂x0 ∂x1 ∂x2 In un punto singolare, sia r il pi` u piccolo intero tale che almeno una delle derivate parziali di ordine r non si annulli in P . Allora il punto P `e r-plo. La tangente in un punto semplice P = (x0 , y0 ) rappresenta in prima approssimazione, cio`e a meno di infinitesimi d’ordine superiore ad x − x0 , la curva f (xy) = 0 nell’intorno del punto P . Infatti si ha, nell’intorno di quel punto. dy (x − x0 ) + , y = y0 + dx 0 con infinitesimo d’ordine superiore rispetto x − x0 . [4], libro I, cap 1. 1 Si osservi che, per il teorema di Eulero sulle funzioni omogenee, se un punto annulla le tre derivate parziali di F , necessariamente annulla anche F . 3 Sia P un punto di una curva algebrica. Scegliamo un sistema di coordinate affini con l’origine in P . L’equazione affine della curva sar`a f (x, y) = a10 x + a01 y + a20 x2 + a11 xy + a02 y 2 + . . . 2 L’origine un punto r-plo se aij = 0 per tutti gli indici i, j tali che i+j < r ma esiste almeno un coefficiente aij diverso da zero con i + j = r. Il cono delle rette che hanno contatto almeno r + 1-plo con la curva in P ha equazione ar0 xr + a(r−1)1 xr−1 y + · · · + a0r y r . Queste rette si chiamano tangenti principali. Un punto di molteplicit`a due si dice anche punto doppio. Un punto doppio si dice nodo se ha le tangenti principali distinte e cuspide altrimenti. Un nodo con le tangenti principali complesse coniugate si dice punto doppio isolato. Inviluppo di una curva Poncelet e Gergonne avevano mostrato chiaramente come le configurazioni della geometria proiettiva possono essere vantaggiosamente considerate assieme alle configurazioni duali. Nel caso di una curva piana, la curva duale era stata definita da Leibniz attraverso il calcolo dell’ inviluppo delle rette tangenti. Ogni punto della curva duale rappresenta una tangente alla curva originaria e la natura di quel punto riflette la natura della tangenza. Per esempio, una bitangente viene rappresentata sulla curva duale da un nodo e un punto di flesso da una cuspide e viceversa, come in Figura La curva in rosso e quella in nero sono l’una duale dell’altra. La curva in rosso ha un nodo cui corrisponde una bitangente, la retta orizzontale tangente ai punti con ordinata massima. Le due cuspidi corrispondono a due flessi che appaiono simmetricamente nella parte superiore della curva nera, dove cambia la concavit`a. 2 a00 = 0 perch´e f (P ) = f (0, 0) = 0 4 Se nella equazione algebrica f (x0 , x1 , x2 ) = 0 si pongono, al posto delle variabili le coordinate di rette, coefficienti della equazione u0 x0 + u1 x1 + u2 x2 = 0, l’equazione F (u0 , u1 , u2 ) = 0 rappresenta una curva inviluppo3 le cui propriet`a si desumono da quelle della f (x0 , x1 , x2 ) = 0 secondo il principio di dualit`a della Geometria proiettiva: all’ ordine della curva f (x0 , x1 , x2 ) = 0 corrisponde la classe dell’inviluppo F (u0 , u1 , u2 ) = 0, che `e il numero delle rette di questo che passano per un punto del piano (non facente parte dell’inviluppo). [4], libro I, cap 1. Singolarit` a di ordine superiore L’approssimazione delle curve in un punto singolare, la quale non aveva dato luogo ad una speciale analisi da parte di Newton, s’incontra nell’opera citata di De Gua (1740), il quale cadde in un errore rilevato da Eulero (Acc. Berlino 1740) e Cramer, ritenendo la prima approssimazione sempre sufficiente a caratterizzare i punti singolari; il tema `e stato svolto poi da Cramer e da Puiseux con la introduzione degli sviluppi in serie di potenze fratte4 . . . [4]. Pl¨ ucker Pl¨ ucker introdusse i metodi analitici nella Geometria proiettiva. I suoi contributi matematici (Pl¨ ucker fu anche un fisico sperimentale di prim’ordine) non si limitarono allo studio della geometria delle rette, che 3 Sia f (x − 0, X − 1, x2 ) = 0 l’equazione di una curva in coordinate omogenee e sia (a, b, c) un punto della curva. L’equazione della retta tangente alla curva nel punto `e x0 ∂f ∂f ∂f (a, b, c) + x1 (a, b, c) + x2 (a, b, c) = 0. ∂x0 ∂x1 ∂x2 La retta u0 x0 + u1 x1 + u2 x2 = 0 `e tangente alla curva se u0 = λ ∂f ∂f ∂f (a, b, c) u1 = λ (a, b, c) u2 = λ (a, b, c). ∂x0 ∂x1 ∂x2 Eliminando a, b, c e λ da queste equazioni e dall’equazione u0 x0 + u1 x1 + u2 x2 = 0 otteniamo l’equazione F (u0 , u1 , u2 ) dell’inviluppo. 4 Per una discussione esauriente del problema dell’approssimazione di una curva nell’intorno di un punto doppio e in particolare della differenza tra punto cuspidale, dove c’`e un solo ramo e nodo, dove ci sono due rami, si veda [4] vol.1, pp. 73-79. 5 abbiamo discusso brevemente nel capitolo sulla storia della Geometria superiore. Introdusse le coordinate omogenee e le coordinate di retta Pl¨ ucker fu anche il primo a giustificare in maniera analitica il principio di dualit`a, in tutta la sua generalit`a, riformul`o analiticamente della teoria delle polari, precis`o analiticamente i concetti di linea all’infinito, di punto ciclico etc., introdotti da Poncelet, studi`o curve e superfici di ordine superiore al secondo. Scopr`ı le importanti formule enumerative che portano il suo nome che legano i caratteri proiettivi elementari di una curva algebrica piana. Le opere principali di Pl¨ ucker sono 1. Analitisch-geometrische Entwicklungen [Sviluppi della geometria analitica] 1828/31; 2. System der analytischen Geometrie (der Ebene) [Sistema delle Geometria Analitica (del piano)], 1834; 3. Theorie der algebraische Kurven [teoria delle curve algebriche], 1839; 4. System der analytischen Geometrie des Raumes [Sistema delle Geometria Analitica (dello spazio)], 1846; 5. Neue Geometrie des Raumes, gegruendet auf die Betrachtung der geraden Linie als Raumelement [Una nuova geometria dello spazio, basato sulla nozione di retta come elemento dello spazio] Tra il 1846 e i 1868, Pl¨ ucker, amareggiato da un’aspra polemica con Steiner sull’uso dei metodi analitici nello studio della geometria, rallent`o la sua produzione matematica dedicandosi a importanti ricerche di fisica sperimentale a Bonn. Lo scopo di Pl¨ ucker fu quello di riformare la geometria analitica,attraverso la completa fusione delle formule con le costruzioni. Nella geometria di Pl¨ ucker la nuda combinazione di equazioni `e tradotta in termini geometrici e le operazioni analitiche sono sempre riferite al loro contenuto geometrico. Il calcolo viene evitato per quanto `e possibile, ma facendo ci`o viene coltivata e applicata estensivamente l’intuizione interna dell’interpretazione geometrica delle equazioni analitiche assegnate. Per illustrare il suo approccio alla geometria, consideriamo la dimostrazione di Pl¨ ucker del teorema di Pascal. 6 Siano p, p0 , q, q 0 e r, r0 le coppie di equazioni lineari delle rette opposte nell’esagono completo. Allora pqr − µp0 q 0 r0 `e l’equazione di un fascio di curve del terzo ordine che passano per i novi punti di intersezione delle due triple p, q, r e p0 , q 0 , r0 . Siccome 6 dei nove punti giacciono su una conica posso scegliere µ imponendo il passaggio per un settimo punto della conica. Per il teorema di Bezout, questa cubica deve contenere la conica come componente, e quindi si spezza nella conica e in una retta, che deve contenere gli altri tre punti. Polare di un punto e polo di una retta rispetto a una circonferenza La polarit`a fu considerata inizialmente con riferimento alla circonferenza, assegnando ad un punto la sua retta polare e ad una retta il suo polo. Se il punto P `e esterno alla circonferenza la corrispondente retta polare `e quella che congiunge i due punti di contatto delle tangenti condotte da P alla circonferenza. Analogamente, se la retta sega la circonferenza in due punti, il polo `e l’intersezione delle due tangenti alla circonferenza nei punti di intersezione. Queste costruzioni si possono fare facilmente con riga e compasso. Per quanto costruire la polare di un punto esterno, si procede come in figura. 7 La retta polare di P rispetto alla circonferenza c di centro C `e la congiungente i punti di intersezione di c con la circonferenza per P centrata nel punto medio M di P C. Per costruire il polo di una retta secante, si procede come in figura. Il polo della retta a rispetto alla circonferenza c si ottiene intersecando le perpendicolari ai segmenti congiungenti il centro C di c con le intersezioni della retta a con c. ` possibile estendere la definizione di polare a un punto interno alla E circonferenza e quella di polo a una retta che non `e secante alla circonferenza a partire dalle propriet`a che polo e polare hanno quando sono definite come sopra. La chiave per l’estensione sta nelle seguenti propriet`a: 1. le polari dei punti su una retta data, passano tutte per un punto, che `e il polo della retta; 2. i poli delle rette di un fascio per un punto dato stanno tutti su una retta, che `e la polare del punto; 3. il polo della polare di un punto `e il punto stesso; 4. la polare del polo di una retta `e la retta stessa. Usando questa propriet`a possiamo costruire la polare di un punto interno alla circonferenza e il polo di una retta che non interseca la circonferenza. Per trovare la polare di un punto P interno alla circonferenza, si considerino due rette r ed s che si intersecano in P e che quindi intersecano la circonferenza. Siano R ed S i rispettivi poli. Allora la polare di P `e la congiungente di R con S. Analogamente, sia p una retta esterna alla circonferenza e siano R e S due suoi punti, che sono ovviamente esterni alla circonferenza. Siano r ed s le rispettive rette polari e sia P l’intersezione di r ed s. P `e il polo di p. 8 La polare `e una nozione covariante, nel senso che, trasformando il punto e la circonferenza con una proiettivit`a, la polare del punto rispetto alla conica sar`a l’immagine della vecchia polare. ` possibile definire la polare di un punto partendo da un punto di viE sta diverso, generalizzando la nozione di diametro coniugato di una conica rispetto ad una direzione. Sia fissata una conica e una direzione e per ogni retta parallela a tale direzione intersechiamo prendiamo il punto di mezzo dell’intersezione della conica con la retta. Al variare della retta, i punti medi descrivono il diametro coniugato della direzione assegnata. Il punto medio di due punti coincide con il quarto armonico dei due punti e del punto improprio della retta. Ci`o suggerisce la seguente costruzione sintetica, per la polare di un punto rispetto a una conica. Sia P un punto e C una conica. La polare di P rispetto a C `e la curva descritta dal quarto armonico di P e delle due intersezioni di una retta per P con C al variare delle rette per P . Le polari di una curva algebrica La nozione di polare pu`o essere estesa alle curve algebriche e fornisce lo strumento principale per studiare le propriet`a proiettive delle curve. La polarit`a rispetto ad una conica, i cui germi si trovano nelle opere degli antichi (Apollonio, Pappo), si pu`o riattaccare a Desargues (1639), che ne scopr`ı le propriet`a fondamentali. Al lume della concezione proiettiva di Desargues (cui risale l’introduzione dei punti all’infinito) la polare d’un punto appare come una generalizzazione del diametro bisecante un sistema di corde parallele e - al tempo stesso - come congiungente i punti di contatto delle tangenti condotte dal polo. Gli sviluppi posteriori della teoria mettono capo alla sua sistemazione nella scuola di Monge, dove, dopo il maestro, sono da annoverare Brianchon, Gergonne, Servois, e specialmente Poncelet. Ivi la polare, che Desargues designava come transversarle de l’ordonnance, riceve appunto il nome di polare,(Gergonne), mentre Servois introduce il nome di polo. La propriet`a proiettiva della polarit`a come corrispondenza, cio`e che le polari di un fascio formano un fascio, viene riconosciuta da Monge riferendosi alle quadriche (`e noto che questa propriet`a condusse pi` u tardi a definire la polarit`a indipendentemente dalle forme di secondo ordine -cos`ı da servire di base ad una nuova trattazione di queste forme- Staudt,1848). Il rapporto della teoria delle polari colle propriet`a diametrali delle coniche 9 appare luminoso nell’ordine delle idee di Poncelet, al quale si deve in particolare il chiaro riconoscimento della retta all’infinito, luogo dei punti all’infinito del piano. Ora la teoria generale delle polari nello studio delle forme algebriche si presenta come naturale estensione dei due modi di considerare la polare d’un punto rispetto ad una conica,cio`e 1. quale congiungente i punti di contatto delle tangenti condotte dal polo, 2. e quale generalizzazione proiettiva del diametro. Sorgono cos`ı due ordini di concetti e quindi due definizioni generali delle polari, che mettono in evidenza il significato e il valore della teoria. 1. Nello studio delle curve piane, la polare scaturisce naturalmente dal problema della tangente, quando si cerchino i punti di contatto delle tangenti condotte ad una curva f da un punto qualsiasi del piano. Questa considerazione suppone che la curva stessa venga concepita non pi` u come data in un tratto limitato, secondo la veduta dell’Analisi differenziale, ma nella sua interezza secondo la veduta sintetica( o integrale) che conviene alla teoria qualitativa delle funzioni, particolarmente algebriche. Anzitutto Monge ha fatto la scoperta fondamentale che la curva di contatto del cono circoscritto ad una superficie d’ordine n appartenente ad una (determinata) superficie d’ordine n − 1 (quella che fu poi designata come superficie polare del vertice del cono). Questa scoperta contiene il resultato a cui pervenne pi` u tardi(1817) Poncelet nell’analisi del problema delle tangenti che si possono condurre ad una curva piana per un punto. Se f (xy) `e una curva algebrica di ordine n > 1, la tangente in un punto (xy) ha per coefficiente angolare 0 y = ∂f ∂x − ∂f ∂y . Ove questa tangente sia assoggettata ad avere una data direzione, cio`e a passare per un punto all’infinito (y/x = k), il suo punto di contatto dovr`a verificare all’equazione ∂f ∂f +k =0 ∂x ∂y 10 che `e d’ordine n−1. Da ci`o Poncelet deduce, per proiezione, che sempre i punti di contatto delle tangenti condotte ad f da un punto stanno sopra una curva d’ordine n − 1. [...] Una notevole semplificazione della teoria delle polari si ha con l’introduzione delle coordinate omogenee, come ha mostrato Pl¨ ucker (1829). Infatti se l’equazione di f `e scritta sotto forma omogenea f (x0 x1 x2 ) = 0, l’equazione della tangente in un punto (x0 x1 x2 ). diviene ∂f ∂f ∂f y0 + y1 + y2 = 0; ∂x0 ∂x1 ∂x2 alloras, tenendo fisse le yi , l’equazione precedente rappresenta senz’altro una curva d’ordine n − 1, che `e la polare del punto (yi ). 2. Attraverso De La Hire (1679) le concezioni di Desargues in ordine alle propriet`a diametrali delle coniche e alla loro generalizzazione proiettiva, passano nella scuola di Newton, ove vengono estese a curve d’ordine superiore. Nell’ Enumeratio di Newton del 1704 si trovano considerate le coniche diametrali e i diametri delle cubiche; questi ultimi vengono definiti in rapporto a fasci di rette parallele, considerando su ognuna di tali rette il punto per cui la somma algebrica delle distanze delle intersezioni della curva riesce nulla. Un teorema postumo di Cˆotes, che trova posto nel trattato di Mac-Laurin (1748), esprime una propriet`a (proiettiva) generale in ordine alle trasversali di una curva uscenti da un punto O, la quale si riduce alla propriet`a del diametro, mandando O all’infinito.Cos`ı s’introducono, in relazione a gruppi dati su una retta per O,quei punti che furono chiamati da Poncelet centri delle medie armoniche. Ad illuminare le anzidette concezioni non ci voleva meno che l’elaborazione d’idee onde riesce costituito, coll’opera di Poncelet, l’organismo della Geometria proiettiva. La definizione sintetica della polare d’un punto rispetto ad una curva, come 11 luogo dei centri delle medie armoniche sopra le trasversali per esso, si trova in una memoria di Poncelet dell’inverno 1816 la quale rimase lungamente inedita e fu pubblicata nel citato volume del 1864 (cfr.[4] pp.5-8). Teoria dei centri armonici Come scrive Cremona nel suo testo [2] che costituisce l’esposizione organica pi` u completa della teoria sintetica delle curve algebriche, la polarit`a permette di sviluppare in maniera facile la teoria elementare delle curve piane. Il desiderio di trovare, coi metodi della pura geometria, le dimostrazioni degli importantissimi teoremi enunciati dall’ illustre Steiner nella sua breve Memoria Allgemeine Eigenschaften der algebraischen Curven (Crelle, t. 47), mi ha condotto ad intraprendere alcune ricerche delle quali offro qui un saggio bench´e incompleto. Da poche propriet`a di un sistema di punti in linea retta ho dedotto la teoria delle curve polari relative ad una data curva d’ ordine qualsivoglia, la qual teoria mi si `e affacciata cos`ı spontanea e feconda di conseguenze, che ho dovuto persuadermi, risiedere veramente in essa il metodo pi` u naturale per lo studio delle linee piane. Il lettore intelligente giudicher`a se io mi sia apposto al vero. [...] La teoria delle curve polari costituisce la seconda Sezione, nella quale svolgo e dimostro con metodo geometrico, semplice ed uniforme, non solo i teoremi di Steiner, ch’egli aveva enunciati senza prove, ma moltissimi altri ancora, in parte nuovi ed in parte gi`a ottenuti dai celebri geometri Pl¨ ucker, Cayley, Hesse, Clebsch, Salmon,... col soccorso dell’ analisi algebrica.Da ultimo applico la teoria generale alle curve del terz’ ordine. Oltre alle opere de’ geometri ora citati, mi hanno assai giovato quelle di Maclaurin, Carnot, Poncelet, Chasles, Bobillier, Moebius, Jonqui`eres, Bischoff ecc., allo studio delle quali `e da attribuirsi quanto v’ ha di buono nel mio lavoro (cfr.[2], p.29). Per definire in modo algebrico-sintetico la nozione di polare `e necessario premettere quella di centro armonico. Seguendo l’esposizione di [2] partiamo dalla considerazione su una retta di n punti a1 , . . . , an e di un polo o. Sia m un punto della retta medesima, tale che la somma dei prodotti degli n 12 ma rapporti P , presi oa ad r a r, sia nulla. Esprimendo questa somma con il ma il punto m sar`a determinato per mezzo dell’equazione simbolo oa r X ma oa =0 r L’equazione `e di grado r e quindi fornisce r posizioni del punto m, che si diranno i centri armonici di grado r del sistema di punti a1 , . . . , an rispetto al polo o. Quando r = 1, si ha un solo punto m, considerato da Poncelet sotto il nome di centro delle medie armoniche. Se invece n = 2, il punto m `e il coniugato armonico di o rispetto ai due punti a1 e a2 . Le propriet`a dei centri armonici sono invarianti per proiezione centrale e quindi per proiettivit`a. Il caso generale della nozione di centro armonico `e dovuto a de Jonqui´eres. Le ricerche di de Jonqui´eres, influenzate dall’incontro con Chasles con cui collabora nella redazione del volume Trait´e de g´eom´etri´e, si concentrano principalmente sulla geometria. Nel lavoro del 1856 M`elanges de g´eom´etrie pure approfondisce gli studi sulle sezioni coniche e la costruzione delle curve di terzo grado. Definizione sintetica della nozione di polare di una curva piana Usiamo finalmente le parole di Cremona per definire la polare di una curva di grado qualsiasi: Sia data una linea piana Cn dell’ordine n, e sia o un punto fissato ad arbitrio nel suo piano. Se intorno ad o si fa girare una trasversale che in una posizione qualunque seghi Cn in n punti a1 , a2 , . . . , an , il luogo de’ centri armonici, di grado r, del sistema rispetto al polo o sar`a una curva dell’ordine r, perch`e essa ha r punti sopra ogni trasversale condotta per o. Tale curva si dir`a polare (n − r)esima del punto o rispetto alla curva data (curva fondamentale). Cos`ı il punto o d`a origine ad n − 1 curve polari relative alla linea data. La prima polare `e una curva d’ordine n−1 ; la seconda polare `e dell’ordine n−2 ; ecc. L’ultima od (n−1)ma polare, cio`e il luogo dei centri armonici di primo grado, `e una retta (cfr.[2], §68 ). Alcuni teoremi per i centri armonici di un sistema di n punti in linea retta possono essere tradotti in altrettante propriet`a delle curve polari relative alla curva data. Ad esempio il seguente teorema relativo ai centri armonici 13 Se l’equazione X ma =0 oa r si moltiplica per oa1 .oa2 ...oan e si divide per ma1 ,ma2 ,... man , essa si muta evidentemente in quest’altra: X oa =0 ma n−r si traduce nella seguente propriet`a delle polari: il luogo di un polo, la cui polare (r)ma passi per un dato punto o, `e la polare (n − r)ma di o. Definizione analitica di polare Sia Q = (a, b, c). Si consideri l’operatore differenziale ∂ ∂ ∂ +b +c ∆Q = a ∂x ∂y ∂z La p-polare di una curva C, di equazione omogenea f (x, y, z) = 0 rispetto a Q `e ∆pQ f (x, y, z). Come esempio di semplicit`a delle dimostrazioni analitiche delle propriet`a delle polari consideriamo la seguente. La p-polare di C rispetto a Q `e il luogo dei punti P tali che la (n − p)-polare di C rispetto a P passi per Q. Espandendo f (λa + µp, λb + µq, λc + µr) in serie di Taylor, prima in P = (p, q, r), poi in Q = (a, b, c), ottenendo 1 µn f (p, q, r) + λµn−1 ∆Q f (p, q, r) + λ2 µn−2 ∆2Q f (p, q, r) + · · · = 2 1 n n−1 λ f (a, b, c) + µλ ∆Q f (a, b, c) + µ2 λn−2 ∆2Q f (a, b, c) + . . . 2 E quindi 1 ∆p f (p, q, r) p! Q = 1 ∆n−p f (a, b, c). (n−p)! P 14 (1) (2) Le formule di Pl¨ ucker. Non `e difficile dimostrare che la polare n−1-esima di una curva non singolare di ordine n relativa ad un punto P interseca la curva in n(n − 1) punti Qi tali che le rette che congiungono P con Qi sono tangenti alla curva nei punti Qi . In conseguenza di questo fatto, abbiamo che una curva non singolare di ordine n ha classe n∗ = n(n − 1). La classe di una curva C `e l’ordine della curva duale. Poich´e la duale della duale `e la curva di partenza, se anche la duale fosse una curva non singolare, si avrebbe n = (n∗ )∗ = n∗ (n∗ − 1) = n(n − 1)(n(n − 1) − 1) e questo `e possibile solo per n = 2. Quindi la duale di una curva liscia di grado maggiore di due `e sempre una curva singolare. L’uguaglianza n = (n∗ )∗ = n(n − 1)(n(n − 1) − 1) che abbiamo interpretato come condizione perch´e una curva e la sua duale siano entrambe prive di singolarit`a fu percepita inizialmente come paradossale (Paradosso di Poncelet). Si noti che la polare n − 1-esima di una curva singolare rispetto ad un punto qualsiasi contiene tutti i punti singolari della curva, cio`e tutti i punti che annullano le derivate prime. Esiste una formula per calcolare il contributo dei punti singolari al calcolo della classe di una curva? A questa domanda risponde la prima formula di Pl¨ ucker 5 che stabilisce che se la curva ha solo nodi e cuspidi, allora n∗ = n(n − 1) − 2δ − 3κ dove δ `e il numero dei nodi e κ `e il numero delle cuspidi. Un problema analogo riguarda il calcolo del numero dei flessi κ∗ di una curva. Se la curva `e liscia, i flessi sono i punti di intersezione della curva C con la curva Hessiana. Se C ha equazione omogenea F (x0 , x1 , x2 ) la sua Hessiana `e la curva di equazione det ∂2F ∂x0 ∂x0 ∂2F ∂x0 ∂x1 ∂2F ∂x0 ∂x2 ∂2F ∂x1 ∂x0 ∂2F ∂x1 ∂x1 ∂2F ∂x1 ∂x2 ∂2F ∂x2 ∂x0 ∂2F ∂x2 ∂x1 ∂2F ∂x2 ∂x2 =0 Poich´e l’Hessiana ha ordine 3(n − 2), il numero dei flessi di una curva liscia `e 3n(n − 2). D’altra parte anche l’Hessiana passa per i punti singolari. La seconda formula di Pl¨ ucker stabilisce che se la curva ha solo nodi e cuspidi, allora il numero dei flessi `e κ∗ = 3n(n − 2) − 6δ − 8κ. 5 In realt` a dovuta a Poncelet, cfr. [4], Libro II, cap. 2. 15 In un punto di flesso di una curva C la tangente ha un contatto tripunto. Dualmente, questa retta `e una cuspide della curva duale. Analogamente, una retta bitangente, `e un nodo della curva duale. Quindi κ∗ indica equivalentemente il numero dei flessi di C e il numero delle cuspidi di C ∗ e δ ∗ indica equivalentemente il numero delle bitangenti di C e il numero dei nodi di C ∗ . Le due formule di Pl¨ ucker per la curva C danno luogo a due analoghe formule per la curva duale, osservando che (κ∗ )∗ = κ, (δ ∗ )∗ = δ, (n∗ )∗ = n. n = n∗ (n∗ − 1) − 2δ ∗ − 3κ∗ κ = 3n∗ (n∗ − 2) − 6δ ∗ − 8κ∗ . Solo tre di queste equazioni tra gli invariati n, n∗ , δ, δ ∗ , κ, κ∗ sono indipendenti. Le formule di Pl¨ ucker, che legano i caratteri di una curva piana, permettono di determinare quali siano i caratteri delle curve di un dato ordine. Per esempio, per le curve di grado 3 abbiamo tre possibilit`a: Cubiche liscie n=3 δ=0 κ=0 n∗ = 6 δ ∗ = 0 κ∗ = 9 Cubiche con un nodo n=3 δ=1 κ=0 n∗ = 4 δ ∗ = 0 κ∗ = 3 Cubiche con una cuspide n=3 δ=0 κ=1 n∗ = 3 δ ∗ = 0 κ∗ = 1 Il contributo di Hesse Il calcolo del numero di flessi fu fatto da Pl¨ ucker in maniera pi` u complicata di quanto abbozzato nel paragrafo precedente, senza fare uso dell’Hessiana. L’Hessiana fu introdotta da Hesse sviluppando un’idea di Jacobi che aveva trasportato l’idea dei determinanti dall’algebra all’analisi. Jacobi aveva introdotto l’idea di determinante funzionale (o determinante jacobiano), associando ad ogni insieme di n funzioni f, g, h, . . . di n variabili, differenziabili in un punto P , il determinante ∂f ∂f ∂f ∂f ∂x ∂x ∂x . . . ∂x n 1 2 3 ∂g ∂g ∂g ∂g . . . ∂xn ∂x1 ∂x2 ∂x3 ∂h ∂h ∂h . . . ∂h ∂x1 ∂x2 ∂x3 ∂xn · · · ... · · · · ... · 16 Lo jacobiano `e invariante per trasformazioni ben pi` u generali delle sostituzioni lineari, ovvero `e invariante per diffeomorfismi locali. Il lavoro di Jacobi sui determinanti fu sviluppato da Hesse (1811-1874). Hesse insegn`o a K¨onisberg, Halle, Heidelberg e Monaco. In Vorlesungen u ¨ber analitische Geometrie mostr`o come usando le coordinate omogenee fosse possibile raggiungere una formulazione simmetrica e di grande eleganza dei calcoli di geometria algebrica analitica. Scopr`ı numerose applicazioni del determinante Hessiano di una forma omogenea f di n variabili, definito come ∂2f ∂2f ∂2f ∂2f . . . ∂x21 ∂x1 ∂x2 ∂x1 ∂x3 ∂x1 ∂xn ∂2f ∂2f ∂2f ∂2f . . . 2 ∂x2 ∂x3 ∂x2 ∂xn ∂x2 ∂x2 ∂x1 · · · ... · · · · ... · ∂2f ∂2f ∂2f ∂2f ∂xn x1 ∂xn ∂x2 ∂xn ∂x3 . . . ∂x2 n Con una sostituzione lineare H 0 = r2 H. H `e un covariante di f . Accenniamo all’applicazione del determinante Hessiano nel calcolo dei punti di flesso di una curva piana. Sia F (x, y) = 0 l’equazione (affine) si una curva piana e sia y(x) la sua equazione locale, definita implicitamente. Un punto di flesso `e determinato dalla condizione y 00 = 0. Dalla formula di derivazione delle funzioni implicite, si ha y” = −fy2 fxx + 2fx fy fxy − fx2 fyy , ovvero fxx fxy fx fxy fyy fy fx fy 0 Questa equazione ha grado 3n − 4 e quindi, per il teorema di Bezout,come abbiamo gi`a detto, ci aspettiamo al pi` u n(3n − 4) flessi. Gi`a Pl¨ ucker forn`ı un argomento per abbassare tale numero a 3n(n−2). Hesse dimostra il risultato molto pi` u chiaramente, passando alle coordinate omogenee e manipolando opportunamente l’espressione per y 00 , verificando che y 00 = x20 · H(F ). Il fattore x20 = 0 introduce i punti di intersezione che sono esclusi in maniera artificiosa con il metodo di Pl¨ ucker, mentre l’equazione H = 0 determina i punti di flesso come intersezione completa con la curva assegnata. Secondo Hesse `e sempre possibile usare formulazioni simmetriche e omogenee fin dal principio nel processo di analisi algebrica. In questo modo i calcoli algebrici sono la pura controparte delle considerazioni geometriche. Hesse us`o questo approccio per studiare le cubiche e le quartiche del piano. L’Hessiana divenne presto uno strumento importate per la geometria analitica. Il nome Hessiano fu introdotto da Cremona. 17 ` ben noto Numero massimo di punti doppi e genere di una curva. E che una curva del secondo ordine irriducibile non pu`o avere punti doppi. Abbiamo gi`a osservato che una curva irriducibile del terzo ordine pu`o avere ` naturale chiedersi qual `e il numero una sola cuspide o un solo nodo. E massimo di punti doppi che pu`o ammettere una curva irriducibile di ordine n. Si pu`o dimostrare che tale numero vale n(n − 1)/2. La deficienza di una curva C irriducibile di ordine n `e la differenza tra questo massimo e il numero di punti doppi effettivi, cio`e n(n − 1)/2 − δ − κ. Come osserv`o Clebsch, la deficienza di C `e uguale a quella di C ∗ i. Oggi si usa il termine genere per indicare la deficienza della curva C. Il genere `e un invariate birazionale e anzi addirittura topologico della curva C e riveste un’importanza fondamentale nella teoria moderna delle curve algebriche. Classificazione proiettiva delle curve Concludiamo con una breve rassegna di risultati sulla teoria proiettiva delle curve di grado tre che fornisce un assaggio dei problemi affrontati dai geometri algebrici della prima met`a del secolo diciannovesimo. • Ogni cubica non singolare `e proiettivamente equivalente ad una cubica di equazione affine y 2 = x(x − 1)(x − c) • Ogni cubica non singolare ha esattemente nove flessi. Ogni retta che ne contiene due, ne contiene anche un terzo. • Salmon (1851). Sia P un punto di una cubica non singolare. Da P si possono condurre quattro tangenti alla cubica, compresa la tangente per P . Se c `e il birapporto delle quattro tangenti, si ponga j(c) = (c2 − c + 1)3 c2 (c − 1)2 Il modulo j delle quattro tangenti non dipende da P e si dir`a invariante j della cubica. Se la cubica si scrive nella forma y 2 = x3 + ax + b il suo invariate j `e 28 33 a3 4a3 + 27b2 • Due cubiche non singolari sono proiettivamente equivalenti se e solo se hanno lo stesso invariante j. • Esistono due classi di equivalenza proiettiva per le cubiche irriducibili singolari: y 2 = x3 e y 2 = x2 (x − 1). 18 • I 9 flessi di una cubica sono distribuiti in triple su 12 rette (Pl¨ ucker). • Le 12 rette di Pl¨ ucker si distribuiscono in 4 triangoli, ognuno dei quali contiene tutti e 9 i punti di flesso. Ognuno dei quattro triangoli `e una cubica riducibile che appartiene al fascio delle cubiche per i 9 flessi, cio`e al fascio f + λH, dove f `e l’equazione della cubica e H la sua Hessian (Hesse). 3 • L’invariante j della cubica si pu`o esprimere nella forma TS 2 dove S e T sono polinomi omogenei invarianti nei coefficienti della cubica, di gradi 4 e 6 rispettivamente. Anche la configirazione delle 28 bitangenti ad una quartica ricevette notevole interesse. Pl¨ ucker forn`ı un esempio di una quartica con 28 bitangenti reali (1839)i e dimostr`o che il numero delle bitangenti reali deve essere 28, 16 o un numero inferiore a 9. Riferimenti bibliografici [1] Boyer C.B., 1990 Storia della matematica, Mondadori, Milano. [2] Cremona L., 1862 Introduzione ad una teoria geometrica delle curve piane, Tipi Gamberini e Parmeggiani, Bologna. [3] Cremona L., 1864 Sulle trasformazioni geometriche delle curve piane Nota I,Annali di Matematica pura ed applicata, serie I, tomo VI, pp. 153-168. [4] Enriques F., Chisini, O., 1912-23 Teoria delle funzioni algebriche di una variabile, vol.3, Zanichelli. [5] Gray J., 2010 Worlds Out of Nothing: A Course in the History of Geometry in the 19th Century Springer Undergraduate Mathematics Series, Springer. [6] Klein F., 1979 Developement of mathematics in the 19th century in Lie Groups Series, vol.9, Math Ci Press, Brookline, Massachussetts. [7] Kolmogorov A.N., Yushkevich,A.P., 1996 Mathematics of the 19th Century, Birkh¨auser, Boston. [8] Pl¨ ucker J., 1828 Analytisch-geometrische entwicklungen, G.D. Baedeker, Essen. 19 [9] Pl¨ ucker J., 1835 System der analytischen Geometrie, Verlag von Duncker und Humbolt, Berlin. 20
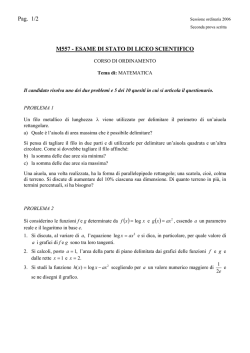
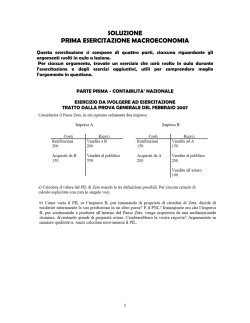
© Copyright 2026 Paperzz