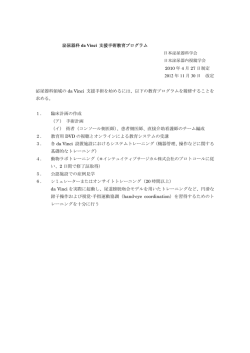
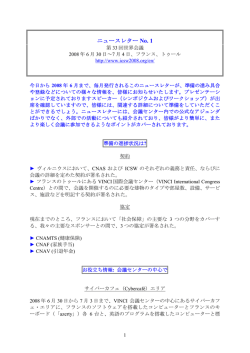
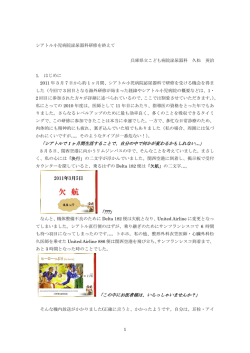
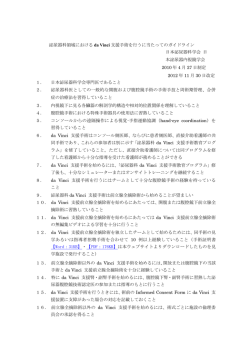
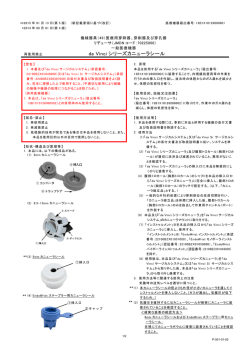
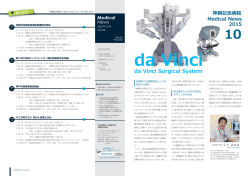
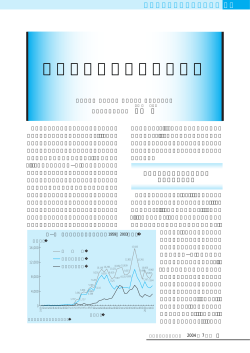
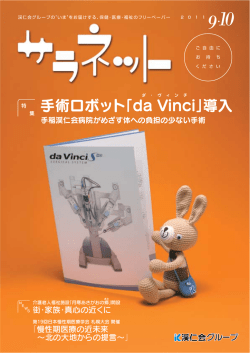
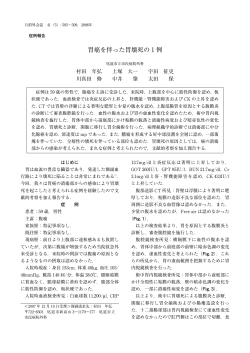
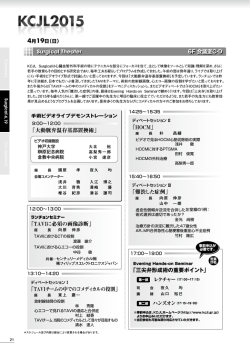
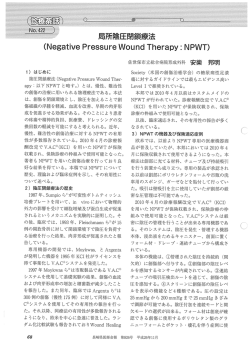
2 綜 説 手術支援ロボット (da Vinci Si) を 用いた胃癌手術 新潟市民病院 消化器外科 桑 原 史 郎 初めに すように操作性より2つに分類される。手術支援 1990年代前半より体腔鏡(胸腔鏡・腹腔鏡)手 ロボット「daVinci」はコンピュタープログラム 術が全世界的に普及し、その適応は良性疾患から により自律的に手術操作を行うものではなく、外 悪性疾患へ、早期癌から進行癌へと広がってきた。 科医の手の動きをその鉗子に伝えて精密な手術操 これらの内視鏡手術は疼痛軽減、早期退院、早期 作をする master-slave 型に属する。 社会復帰といった多くの利点を有している。その 2)手術支援ロボット「da Vinci」について 一方で、自由度の少ない器具(鉗子)の使用、2 1990年代にアメリカ航空宇宙局(NASA)とア 次元のモニター下での操作、術野展開の制限等に メリカ陸軍は宇宙空間や戦場で遠隔操作が可能な より外科医には高度な技術が要求され、技術習得 手術ロボットの開発に乗り出した。これらは、動 には長時間を要する。1999年にアメリカ Intutive 物実験では一定の成果を上げたが、宇宙空間や戦 Surgical 社が開発、 販売した手術支援ロボット「da 場での実際の使用には至らなかった。これらの技術 Vinci」は欧米を中心に泌尿器科領域、婦人科領 を応用して1999年にアメリカの Intutive Surgical 社 域において多数の臨床使用が行われてきた。本邦 が手術支援ロボット「da Vinci Surgical System」 では2009年に薬事承認され、2012年からは前立腺 を 作 成、 販 売 し2000年 7 月 に 米 国 食 品 医 療 局 全摘出術に対してロボット加算が保険収載されて (FDA)の認可を受けた1)-2)。現在まで、4世代 いる。本稿では、ロボット支援手術の概略と2013 にわたる改良が加えられているがその基本構造は 年12月より当科で施行している胃癌に対するロ 同じである(図1) 。外科医が鉗子操作を行うコ ボット支援手術の実際について述べる。 ンソール(サージョンコンソール) 、カメラ及び 3本の手術用鉗子を取り付け直接患者の操作をお ロボット支援手術の概略 こなう患者側のカート(ペイシェントカート)、 1)ロボットの分類 術野の高解像度の映像をコントロールするカート ロボットとは人の代わりに仕事(作業)を行う (ビジョンカート) の3つの部分より構成される。 機械の総称である。今日では多数のロボットがさ 外科医はサージョンコンソールで高解像度の3D まざまな産業分野で使用されているが、表1に示 モニターを見ながら左右の手に装着したマスター 表1 ロボットの分類 新潟県医師会報 H26.10 № 775 3 コントローラーを操作することでペイシェント である。またカメラ、鉗子はロボットアームによ カートに装着された3本の鉗子、カメラを操作す り固定されているため揺れのない安定した視野、 る。鉗子は7度の自由度を有しており外科医の手 操作が可能である。さらに前述の7度の自由度、 関節とまったく同じ動きをし、2本の指の動きに tremor filtering 機能、motion scaling 機能を有す あわせて鉗子が開閉する(図2)。さらにコン る鉗子は外科医の指先とまったく同様に動き、従 ピュータにより外科医の手振れの修正(tremor 来の内視鏡手術でも困難であった深い部位、狭い filtering 機 能 )、 鉗 子 の 可 動 域 の 調 整(motion 部位、直角の部位などの操作が可能である。加え scaling 機能)が行われ正確で揺れの無い操作が て3D の高解像度カメラにより奥行き感を持って 可能である。現在までに全世界で約3,000台が納 小さな血管、神経までも同定でき精緻な操作が可 入され、200万例の手術が行われている。本邦で 能である。一方、ダヴィンチ手術の欠点の一つに は180台が泌尿器科を中心に納入、稼働しており 触覚の欠如がある。従来の内視鏡手術では開腹手 アメリカに次ぐ世界第2位の保有国となってい 術には劣るものの触覚は鉗子を通して術者の手に る。また da Vinci Standard(1999) 、da Vinci S 感じとることが可能であった。しかしダヴィンチ (2006)、da Vinci Si(2009) 、da Vinci Xi(2014) 手術ではサージョンコンソールとペイシェント の4世代の daVinci Surgical System がこれまで カートは電気ケーブルでの連結されているのみで に発売されたが、本邦で医療器具として薬事承認 あり、触覚は全くない。このため組織の牽引、縫 されているのは da Vinci S および da Vinci Si の 合糸の結紮の際にはモニターからの組織の状態を 2機種であり当院ではda Vinci Siを使用している。 確認することが重要であり、最大限の注意を要す 3)従来の内視鏡手術との違い(表2) る。また、コストが非常に高価であることも大き 手術支援ロボット「da Vinci」による手術(以 な欠点である。 下ダヴィンチ手術とする)は従来の内視鏡下手術 4)導入条件(表3) の利点をさらに向上させ、欠点を改善している。 現在、本邦では日本内視鏡外科学会(JSES) 内視鏡手術と大きく異なる点として従来の内視鏡 による 「手術支援ロボット手術導入に関する提言」 手術ではカメラと手術操作は最低2名の医師によ (http://www.jses.or.jp/member/pdf_regulation/ り操作されるが、ダヴィンチ手術ではサージョン robot_20120815.pdf)があり、安全に内視鏡手術支 コンソールの術者の1名のみがカメラ、鉗子を操 援ロボット導入・普及させるために満たすことが望 作し最適な視野を展開することが可能であること 図1 手術支援ロボット「da Vinci Si」の構造 A:サージョンコンソール:外科医が鉗子とカメラ の操作を行う。 B:ペイシェントカート:アームに接続された鉗子 図2 手術支援ロボット「da Vinci Si」の剪刃(上) とカメラを患者にドッキングし実際の手術を行う。 C:ビジョンカート:3D の高精細画像を処理、保存 する。 関節と同様に動き、開閉する。従来の腹腔鏡手術の 鉗子類は回転と開閉のみである。 と従来の腹腔鏡手術の剪刃(下) da Vinci の鉗子類は7度の自由度を有し外科医の手 新潟県医師会報 H26.10 № 775 4 表2 内視鏡下手術とダヴィンチ手術の比較 表3 日本内視鏡外科学会:ロボット手術導入に関する提言(抜粋) ましい7条件を挙げている。この提言によりダヴィ なった。これはダヴィンチによる3次元視野のも ンチ手術の施行施設、術者を厳しく制限している。 と自由度の高い鉗子を使用して手振れのない操作 が狭い骨盤腔で可能なためである。一方、胃癌に 胃癌に対する「ダヴィンチ手術」 対するダヴィンチ手術は、本邦では手術支援ロ 1)本邦における胃癌に対するダヴィンチ手術の ボットの薬事承認が諸外国より約10年遅れたため 現況 韓国を中心に普及していった。韓国での胃癌に対 胃癌に対する腹腔鏡下胃切除は1994年に本邦で するダヴィンチ手術の結果の多くは後ろ向き試験 北野 が世界初の腹腔鏡下胃切除を報告し、以後 の報告であるが、これによると胃癌に対するダ 日本、韓国を中心に急速に普及し、2014年5月の ヴィンチ手術は従来の腹腔鏡下胃切除と比べて手 「胃癌治療ガイドライン」では早期胃癌に対する 術 時 間 の 若 干 の 延 長、 出 血 量 の 減 少、 急 峻 な 治療法の一つと定義されている 。しかしながら learning curve(10 ~ 20例)などが報告されて 腹腔鏡下胃切除では前述のように自由度の少ない いる5)-7)。本邦では藤田保健衛生大学の宇山らに 直線的な鉗子を2次元でのモニター下で操作し、 より2009年に初めて胃癌に対するダヴィンチ手術 手術にはかなりの習熟が必要であった。一方、ア が施行された。その後、 同施設のSudaら8)はダヴィ メリカを中心に前立腺癌に対するダヴィンチ手術 ンチ手術ではリンパ節郭清範囲の拡大 (D1→D2) 、 が爆発的に普及し、本邦でも2012年保険収載と 胃切除範囲の拡大(亜全摘→全摘)をしても、手 3) 4) 新潟県医師会報 H26.10 № 775 5 術合併症は増加せず、腹腔鏡下手術の難易度を軽 め除外している。さらに現時点で本邦ではダヴィ 減できると述べている。本邦からの前向き試験と ンチ手術で保険適応となっているものは前立腺全 して Tokunaga ら が腹腔内感染性合併症の発生 摘のみであり、胃癌に対するダヴィンチ手術は全 頻度を主要評価項目とした第Ⅱ相試験の結果を発 額自費となる。このため自費診療に同意された場 表しており、これによると腹腔内感染性合併症は 合にダヴィンチ手術を施行している。 18例で1例も生じず、極めて安全な手術であると 4)体位・ダヴィンチのセッテング・使用鉗子 述べている。当科では2002年より腹腔鏡下胃切除 患者は閉脚仰臥位とし、両手は体幹より90度外 を約900例経験し、さらなる発展を目的に2013年 転する。臍部にスコープ用ポートを、3か所のダ 12月より胃癌に対するダヴィンチ手術を開始し ヴィンチ鉗子用のポートと1か所の助手用ポート た。 (なお、2014年1月からは直腸癌、8月からは を作成する(図3) 。ダヴィンチのペイシェント 前立腺癌にもダヴィンチ手術を開始している) カートを患者左肩より Roll-in させそれぞれのポー 2)導入準備 トとダヴィンチのアームをドッキングさせる(図 前述の内視鏡外科学会の提言に基づき準備を進 4) 。この際、ダヴィンチのアームが互いに干渉 めた。具体的にはダヴィンチ購入決定時よりダ しないように各アーム間を十分広く開けることが ヴィンチ導入チーム(医師、看護師、臨床工学士) 肝要である。通常の腹腔鏡下手術では切開・剥離 を結成し、院内倫理委員会への諮問、ダヴィンチ に超音波切開凝固装置を使用するが、本邦ではダ 手術術者・術式申請の内規作成、電力・荷重の点 ヴィンチ用の超音波切開凝固装置が薬事未承認の 検 な ど を 施 行 し た。 本 体 納 入 後 は Intutive ため使用できない。このためバイポーラーの通電 Surgical 社の規定のトレーニングを受講、藤田保 可能な鉗子(術者左手)とモノポーラーの通電が 健衛生大学で医師は3回、看護師、臨床工学士は 可能な剪刃(術者右手)を使用する。ダヴィンチ 2回のダヴィンチ手術の見学をした。最後にアニ の3番目のアームは視野確保のための鉗子を装着 マルトレーニングを行いcertificationを取得した。 する。術者は3本の鉗子のうち2本を自由に選択 ダヴィンチ本体の納入から初症例までのトレーニ しマスターコントローラーを装着した両手で操作 ング期間は4か月であった。 する。カメラは術者のフットペダルとマスターコ 3)適応 ントローラーにより任意の部位に移動可能である。 胃癌の適応としては術前検査にて漿膜浸潤を認 5)手技の実際 めない N2までの T3N2M0の Stage IIIA までとし 手術の詳細は他書10) を参照していただきたい 9) ている。ただし、原発巣やリンパ節転移巣が大き なものは腹腔鏡手術と同様に操作性が悪くなるた 図3 胃 癌に対するダヴィンチ手術のポート位置 (左)と実際の創部(右) R1 ~ 3:ダヴィンチ鉗子用(8mm) RC:ダヴィ ンチカメラ(12mm) A:助手用(12mm) 図4 ペイシェントカートのドッキング ペイシェントカートが患者にドッキングした状態。 4本のアームが患者を包み込むような形でドッキン グする。 新潟県医師会報 H26.10 № 775 6 が、手術手順は腹腔鏡下胃切除とほぼ同様である。 6)成績 実際にダヴィンチ手術を行ってみると腹腔鏡手術 現在までに胃癌に対するダヴィンチ手術を8例 では得られない数多くの利点が実感できる。3D に施行した。開腹移行例はなく、全例で切除から の高解像度画像、多関節機能を有する安定した鉗 再建までをダヴィンチ手術にて施行可能であっ 子、完全に固定されたカメラにより、理想的な剥 た。臨床成績を表4に示す。全例が幽門側胃切除 離層が容易に認識され、これを維持したまま鋭的 であり、うち2例は胆石症を合併しておりダヴィ に操作を進めることが可能である。さらに従来の ンチ手術にて胆嚢摘出術を併施した。手術時間は 腹腔鏡手術では膵上縁のリンパ節郭清では直線的 375分(うちダヴィンチ使用時間、コンソールタ な鉗子や術野展開のために膵の背尾側への圧排が イムは335分)であり。出血量は20ml であった。 必須で難易度が高かったが、ダヴィンチ手術では 全例で D2郭清を施行し、郭清リンパ節個数は42 7度の自由度をもつ鉗子により正確な剥離層を保 個 で あ っ た。 術 後 合 併 症 は 1 例 に 肝 酵 素 上 昇 ちつつ腹側背側方向でのリンパ節郭清が可能であ (Clavien Dindo 分類 grade I)が認められたが、 り膵へのダメージが軽減されていると思われる その他の症例では合併症を認めなかった。 (図5) 。また、ダヴィンチ手術では鉗子の牽引 方向の自由度が高く、牽引力も一定で安定してい 考察 る。このため術野展開はダヴィンチの3番アーム これまで、人間の眼を超える手術デバイスは手 と重力を利用した展開となり、腹腔鏡手術に見ら 術用顕微鏡、内視鏡などがかなり以前より開発さ れる体外からの助手の鉗子による細かな牽引は不 れていた。しかしながら、人間の手を超える手術 要であり、助手は組織を軽く圧排することが主な デバイスはダヴィンチが最初と思われる。外科医 操作となる。胃切除はダヴィンチで施行し再建は は高解像度の3D モニター下に、人間の手よりは 腹腔鏡で行うハイブリッド手術を行っている施設 るかに小さい鉗子を、繊細に、滑らかに、直観的 もあるが、当科では再建もダヴィンチを用いて施 に操作可能である。これらの特性を従来の開腹、 行している。この際にも多関節機能のある鉗子に 腹腔鏡手術で得られた知識・技術と融合すること よる縫合が非常に有効である。一方、ダヴィンチ でさらなる適応が可能であり、良性疾患や早期癌 手術の欠点として触覚の欠如があり、これによる は従来の腹腔鏡手術で施行され、より難易度の高 結紮時の糸の離断、組織切断を危惧するが、結紮 い手術、進行癌に対する手術はダヴィンチ手術へ 時に拡大視することで通常の太さの結紮糸(3-0、 と移行していくと考えられる。具体的には食道切 4-0)では十分予防可能であった。 除、膵頭十二指腸切除などが今後の良い適応であ ろう。実際、見学に訪れた藤田保健衛生大学では 膵頭十二指腸切除における門脈再建まですべてダ ヴィンチ手術で精緻に施行していた。 一方、 ダヴィ ンチ手術は現時点で前立腺全摘のみが保険適応で あり、それ以外の場合は自費診療となる。今後、 保険収載をめざしてさらなるエビデンスの構築が 必要であろう。なお、本年10月より厚労省により ダヴィンチによる胃切除が先進医療 B として認 図5 ダヴィンチ手術での膵上縁リンパ節郭清 ダヴィンチの鉗子 R1、R2により膵上縁(総肝動脈・ 脾動脈周囲)のリンパ節が郭清されている。 R1:ダヴィンチ剪刃(術者右手) R2:ダヴィンチ 鉗 子( 術 者 左 手 ) LGV: 左 胃 静 脈 PV: 門 脈 CHA:総肝動脈 PHA:固有肝動脈 SpA:脾動脈 新潟県医師会報 H26.10 № 775 可され前向き臨床試験が開始されている。さらに ダヴィンチシステムがアメリカで開発され、欧米 人の体型を標準としているため小柄な日本人では ロボットアームの干渉が起こりやすい。日本で設 計・製造された Made in Japan の手術支援ロボッ トが望まれ、安倍政権下での日本製ロボットの作 成の勅令に大いに期待している。医療工学は外科 7 表4 胃癌に対するダヴィンチ手術と腹腔鏡手術の周術期成績 医が考えるより遥かに早く進歩しており、今後10 laparoscopic and open resections for gastric 年程度で多くの外科手術(開腹・腹腔鏡)がロボッ carcinoma. Br J Surg 2013; 100: 1566-1578. ト手術になっていくと思われる。 7)Park SS 1, Kim MC, Park MS, et al: Rapid adaptation of robotic gastrectomy for 文献 gastric cancer by experienced laparoscopic 1)Lanfranco AR, Castellanos AE, Desai JP, et surgeons. Surg Endosc 2012; 26: 60-67. al: Robotic surgery: a current perspective. Ann Surg 2004; 239: 14-21. 2)Albani JM: The role of robotics in surgery: a review. Mo Med 2007; 104: 166-172. 8)Suda K 1, Man-I M, Ishida Y, et al: Potential advantages of robotic radical gastrectomy for gastric adenocarcinoma in comparison with conventional laparoscopic approach: a 3)K itan o S , Is o Y , M oriyam a M , e t a l : single institutional retrospective comparative Laparoscopy-assisted Billroth I gastrectomy. cohort study. Surg Endosc 2014; [Epub Surg Laparosc Endosc 1994; 4: 146-148. ahead of print]. 4)日本胃癌学会編 : 胃癌治療ガイドライン . 第 4版 , 金原出版 , 東京 , 2014. 9)Tokunaga M, Sugisawa N, Kondo J, et al: Early phase II study of robot-assisted distal 5)Woo Y, Hyung WJ, Pak KH, et al: Robotic gastrectomy with nodal dissection for gastrectomy as an oncologically sound clinical stage IA gastric cancer. Gastric alternative to laparoscopic resections for Cancer 2014; 17: 542-547. the treatment of early-stage gastric cancers. Arch Surg 2011; 146: 1086-1092. 10)Noshiro H, Ikeda O, Urata M: Roboticallyenhanced surgical anatomy enables surgeons 6)H y u n M H , L e e C H , K i m H J , e t a l : to perform distal gastrectomy for gastric Systematic review and meta-analysis of cancer using electric cautery devices alone. robotic surgery compared with conventional Surg Endosc 2014; 28: 1180-1187. 新潟県医師会報 H26.10 № 775
© Copyright 2026 Paperzz