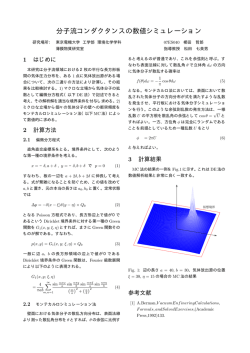
工業力学 (A コース) 中間テスト 茨城大学 工学部 知能システム工学科 解答例・解説 井上 康介 2014/12/16 10:30∼12:00 実施 全体的なできぐあい・総評 ば,(9:反力) の方向は ( 10:接触面に垂直 ) と なる. • 鉄橋や鉄塔などのような骨組み構造を単純化し たモデルに ( 11:トラス ) がある.(11:トラス) は,棒状の要素である ( 12:部材 (メンバ) ) が, ( 13:節点 (ジョイント) ) と呼ばれる回転自由 ع ع ع ع ع ع ع ع ع ع 平均点 74.5 点.最高点は 99 点.受験者 61 名 (欠試者 4 名).それなりに理解度はあるとは思われたが,必ず出 すと宣言した 4 番の問題 (Newton-Eulre 法) の得点率が 52% と低迷した. 各設問について 1. 以下の文章の空欄に入る言葉・数式を記せ. • 複数の力が同時に作用したときの効果と同じ効果 を持つ単一の力を ( 1:合力 ) という.逆に,単 一の力を同じ効果を持つ複数の力に変換すること を力の ( 2:分解 ) といい,その際のそれぞれの 力を ( 3:分力 ) という. なピンで結合され,相対運動ができない構造と なっている.(11:トラス) の内部ではそれぞれの (12:部材) が引張力や圧縮力という内力を受け るが,その解析に利用できる 2 つの方法のうち, ( 14:節点法 ) と呼ばれる方法では,まず (11:ト ラス) 全体のつりあい条件を用いて (11:トラス) が受ける (9:反力) などの外力を導出し,続いて 各 (13:節点) が受ける力のつりあいの条件を用 いて各 (12:部材) の内力を計算していく.平面 上の (11:トラス) の解析では,作用している未 知力が ( 15:3 ) つ以上の (13:節点) については まだ計算が解けないため,解ける (13:節点) か ら順次計算していかなければならない. • 物体に作用する重力の作用線は物体上のある一点 を常に通る.この点を物体の ( 16:重心 ) とい う.物体上に微小部位をとり,その位置を x,そ (16:重心) の微小質量を dm とするとき,物体の dm ) のように積分計 の位置は ( 17: x dm 算により求められる. • 物体上で作用する力の作用線が物体上のある点 A を通らない時,力は物体を点 A まわりに回転 させる作用をもつ.この作用を ( 4:力のモーメ ント ) といい,その大きさは,力の大きさと ( 5: 点 A と力の作用線の距離 ) との積である.その • (16:重心) は物体のすわりのよさ,つまり安定性 値の正負については,回転させる作用の方向が反 時計回りの時,( 6:正 ) である. • 物体が現在の速度を維持しようとする傾向,つま • 大きさが等しく,向きが反対の 2 つの平行力を ( 7:偶力 ) という.(7:偶力) は物体を回転させ る作用はもつが並進運動させる作用はない.2 つ の力の作用線の間隔を d とし,それぞれの力の大 きさを F とするとき,(7:偶力) がもつ (4:力の モーメント) の大きさは ( 8:F d ) と計算できる. • 物体 A が他の物体 B を押す時,作用・反作用の 法則により,A は B により同じ大きさの逆向き の力で押し返される.この力を ( 9:反力 ) とい う.このとき,接触面がなめらかで摩擦がなけれ の重要な指標となる.水平面上にある物体を少し 傾けた時,(16:重心) の位置が最初の位置より上 る場合の安定性は ( 18:安定なすわり ) と呼ば れる. り並進運動に関する慣性に対応する量を質量とす れば,現在の角速度を維持しようとする傾向,つ まり回転運動に関する慣性に対応する量は ( 19: 慣性モーメント ) と呼ばれる.物体の (19:慣性 モーメント) を I とし,この物体にトルク N を 加えた時の物体の角加速度を ω˙ とすると,これ らの間には ( 20:N = I ω˙ ) のような式で表され る関係が成り立つ.この式を ( 21:角運動方程式 (Euler の運動方程式) ) という. • 物体上に微小部位をとり,その質量を dm,ある 回転軸と微小部位の距離を r とするとき,この 回転軸まわりの物体の (19:慣性モーメント) は ( 22: r2 dm ) のような積分で計算できる. • ある回転軸まわりの物体 A の (19:慣性モーメン ト) が I であり,この物体の一部分 B の回転軸ま わりの (19:慣性モーメント) が I であるとする と,A から B を除去した残りの部分の (19:慣性 モーメント) は ( 23:I − I ) となる. 配点・部分点 • • • • • • • • • • • 46 点 (各 2 点). スカラーが太字・ベクトルが細字:−1 (2) 分割:NG (3) 直角分力:1 (4) トルク:(ホントはダメだけど) OK. (5)「作用線からの距離」「点 A からの距離」「距 「腕」 :1 離」 :1,「モーメントアーム」 (8) F d:1,2F d:1 (10)「垂直」のみ:1 (14)「接点法」:1 (18)「安定」のみ:OK (21) Euler (オイラー) の運動方程式:OK (22) r dm:NG, r2 dm:1 多かった間違い・補足 が受けている力を全て列挙し,次に力および力のモー メントのつりあい条件を定式化して解けば良い.ここ で,平面上で考える場合は力のつりあい条件は直交す る 2 方向についてそれぞれ成り立ち,この問題では水 平方向のつりあいと鉛直方向のつりあいを式にすれば 良い.一方,力のモーメントはどの点まわりで考える かにより値が変わるが,力がつりあっている場合,ど の点まわりで式を立てても等価な式となるため,任意 の点まわりで計算して良い.したがって,未知力 2 つ の作用線が貫いているジョイントの点を基準に計算す ることで (式 (2.3)),計算を簡略化してミスの可能性 を減らすべきである. なお,斜面から受ける反力 (Fig.2 の R2 ) が持つジョ イントまわりの力のモーメントは,教科書 p.8 の 例題 1.3 のように N = fy x − fx y の式を用いて求 める場合,ジョイントを原点とした斜面との接触点 の座標 (l cos 30◦ , l sin 30◦ )T と反力ベクトル R2 = (−R2 cos 30◦ , R2 sin 30◦ )T から求められる.あるい は,R2 が棒と 60◦ の傾きをもつことから,R2 のう ちの棒に垂直な成分の大きさが R2 sin 60◦ であり,こ れにモーメントアーム l をかけてもよい.重力のモー メントを求める方法についても同様である. 解答例 • (5) でモーメントアームを OK にしなかったのは 「この場合,モーメントアームとはどこか」を問 うているから.(10) で「垂直」のみがダメなのも 同様で「何と何が垂直なのか」を問うている. • (10) で「押したのと逆」だけなら,滑らかでない 面でも同様 (作用・反作用の法則). できぐあい 平均得点率 83%.(5), (10), (17) のでき が 60% を切った. 2. Fig.1 に示すように,質量が 400 [g],長さが 20 [cm] の細い棒の一端を地面上の自由回転ジョイントに固定 し,他端を地面からの傾き 60 [deg] のなめらかな斜面 に乗せたところ,棒の傾きは地面から 30 [deg] となっ た.このとき,棒がジョイントおよび斜面から受ける 反力を求めよ. 棒の質量を m (= 0.4 [kg]),長さを l (= 0.2 [m]) と 表記する. 水平右,鉛直上方向にそれぞれ x 軸,y 軸をとる. 斜面と棒の接触はなめらかなので,棒が斜面から 受 け る 反 力 は 斜 面 に 垂 直 で あ る .こ れ を 踏 ま え , 棒がジョイントおよび斜面との接触点において受 け る 反 力 を そ れ ぞ れ R1 = (R1x , R1y )T ,R2 = (−R2 cos 30◦ , R2 sin 30◦ )T とする.棒はこれら反力 の他に,重心 (中点) において y 軸負の方向に重力 mg を受けている (Fig.2). R2 30r R1 30r mg 60r 3 l 4 30r 60r Fig.1 Fig.2 棒が受ける水平方向の力のつりあい式は, R1x − R2 cos 30◦ = 0, 考え方 物体のつりあいの解析 (教科書 2.3 節) では,まず物体 (2.1) 鉛直方向の力のつりあい式は, R1y + R2 sin 30◦ − mg = 0, (2.2) y [cm] ジョイントまわりの力のモーメントのつりあい式は, R2 sin 60◦ · 0.2 − mg sin 60◦ · 0.1 = 0. 6 (2.3) 3 式 (2.3) より R2 = x [cm] 1 mg . 2 O 3 これを式 (2.1),式 (2.2) に代入して, R1x √ 3 1 3 mg , R1y = mg − R2 = mg = 4 2 4 mg = 4 [N] なので,ジョイントから受ける反力は水 √ 平右方向に 3 1.73 [N],鉛直上方向に 3 [N] であ り,斜面から受ける反力は斜面に垂直な方向に 2 [N] である. 配点・部分点 18 点.水平力・鉛直力・モーメントの つりあい式:各 4 点,変数設定等・残りの計算:6 点. • • • • 正負のミス:−1∼−2 斜面からの反力の方向のミス:−2 単位変換ミス (1[N] = 1[g·m·s−2 ]):−1 最初の設定の段階で,ジョイント反力の要素・壁 反力の方向を指定していない:−2 Fig.3 取り除いた際の重心 xG は, (mA − mB )xG = mA xA − mB xB により求まる (教科書 p.36 例題 3.2). 回転体の体積については教科書 3.2.2 項のパップス・ ギュルダンの定理を愚直に適用すれば良い. 解答例 平面図形を正方形の物体 1 から直角二等辺三角形の 物体 2 を除去したものと考え,物体 1 の面積・重心 を A1 ,x1 = (x1 , y1 )T ,物体 2 の面積・重心を A2 , x2 = (x2 , y2 )T とする (Fig.4). y [cm] 6 多かった間違い • 力のモーメントの計算ができていない例が非常 に多かった.ジョイントまわリで計算するなら, 方法は 2 つある.ひとつはジョイントを原点と して水平右向き・鉛直上向きに xy 座標軸をと り,壁との接点の座標は (l cos 30◦ , l sin 30◦ )T , 力ベクトルは (−R cos 30◦ , R sin 30◦ )T だから, N = fy x − fx y を適用して ◦ 6 A2 3 x2 x1 A1 O 3 x [cm] 6 Fig.4 ◦ N = R sin 30 · l cos 30 −(−R cos 30◦ ) · l sin 30◦ −mg · (l/2) cos 30◦ とする方法.もう一つは,2 つの力,mg ,R の うちの棒に直交する成分を求め,棒に沿ったモー メントアーム (l/2 と l) をかける方法 (力のうち の棒に沿った成分はモーメントを作らないので). できぐあい 平均得点率は 76%. 3. Fig.3 に示すように,一辺が 6 [cm] の正方形から斜辺 が 6 [cm] の直角二等辺三角形を切り取った形状の平 面図形を考え,図のように座標軸をとった時,この図 形を x 軸および y 軸まわりに一回転させてできる回 転体の体積をそれぞれ求めよ. 考え方 物体の重心 (図心) を考える時,質量 mA ,重心位置 xA の物体 A から質量 mB ,重心位置 xB の物体 B を 物体 1,2 はそれぞれ直線 x = 3 に関して線対称なの で,x1 = x2 = 3 であり,物体 1 は y = 3 に関して 対象なので y1 = 3 である.物体 2 は三角形なので, 重心は上の水平な辺の中点へ頂点から下ろした線分を 2:1 に内分した点であることから,y2 = 5 である. よって平面図形の重心を xG = (xG , yG )T とすると, xG = 3, yG = 7 36 · 3 − 9 · 5 = 36 − 9 3 と求まる. 平面図形を x 軸および y 軸まわりに一回転させてで きる回転体の体積をそれぞれ Vx ,Vy とし,平面図形 の面積を S = 36 − 9 = 27 とすると,Vx = 2πyG S = 126π 396 [cm3 ],Vy = 2πxG S = 162π 509 [cm3 ] である. 別解 図形的に考えると,x 軸まわりに回転してでき る回転体は,上面が半径 3,底面が半径 6,高さが 3 の円錐台を 2 つつなげた物体の体積として計算でき, 2 · (π/3)(216 − 27) = 126π となる. y 軸まわりに回転してできる回転体は,半径 3,高さ 6 の円柱から上記の円錐台の分をくりぬき,半径 3,高さ 3 の円錐を乗せたとみなせるので,(216 − 63 + 9)π = 162π と計算できる. ※ 試験において,重心を利用して計算せよと指示す るのを忘れていたため,この解法で正解した場合も満 点とします.試験中はこの解法をやめて欲しかった ので「こっちの方が面倒だぞ」的なことを言っていた わけですが,実際には労力は同程度.だけど…それを やっちゃったらもう工業力学じゃねーじゃん,とい う….かといって,途中までこれで計算しちゃった人 にいきなり「それだと 0 点です」というのも,その人 達が不利になるのでできないと判断しました. まず Fig.6 のように物体に作用する力をもれなく列挙 すると,物体は 300 [N] の力 F の他に,重心 (中心軸 上) に鉛直下に作用する重力 mg ,地面との接地点で 鉛直上方向に作用する垂直抗力 R,地面との接地点 で水平右もしくは左方向に作用する摩擦力 F を受け ている.ここで,摩擦力が左右どちらを向くかは分か らなくてよく,反対を正として定義した場合は値がマ イナスになるだけである.物体は鉛直方向に運動しな いので,mg と R,および F の鉛直方向成分はつり あい状態であり,ここでは問題にしなくて良い. F 45r 配点・部分点 18 点.重心で解く場合は,各部位の重 心:計 8 点,全体の重心:6 点,変数設定等・残りの 計算等:4 点.図形的に解く場合は,考え方の説明:6 点,それぞれの軸まわりの体積:各 6 点. • 部位ごとの重心の導出過程が抜けている:−4 • 部分・全体の重心の導出過程がまるごと抜けてい る:−8 • x 軸まわりと y 軸まわりの取り違え:−1 できぐあい 平均得点率 72%.まあ理解できている みたい.ただし,こちらのミスのせいもあって,重心 を使ってない解答例が多かった.図形的にやる場合に ついて,この程度の計算をミスなくやれないのでは困 るという認識をもつこと. 4. Fig.5 に示すように,質量 100 [kg],直径 1 [m] の均 一な円柱を水平な地面におき,図の位置において斜め 下 45 [deg] 方向に 300 [N] の力を加えたところ,円 柱は地面との間に滑りを生じずに右方向に転がった. この際の円柱中心の加速度を求めよ.ただし,質量 m,半径 r の円柱の中心軸まわりの慣性モーメントは I = mr2 /2 である. 300 [N] 45r Fig.5 mg R F’ Fig.6 あとは水平方向に受けている力を用いて運動方程式 を,重心周りに受ける力のモーメントを用いて角運動 方程式を立てれば良い. ただし,未知数は円柱の加速度 a,角加速度 ω˙ ,摩擦 力の大きさ F の 3 つなのに対して,これでは拘束条 件が 2 つしかない.もう一つの条件は「滑らずに転が る」ということである.物体が転がらずに右に距離 x 進むため回転しなければならない角度を θ とすると, 回転が時計回りであることを踏まえて x = −rθ が成 り立つ.この式を 2 階微分すると,a = −r ω˙ となり, これが 3 つ目の拘束条件となる. 解答例 円柱に加える 300 [N] の力を Fig.6 に示すように F と表記し,円柱の質量を m (= 100 [kg]),半径を r (= 0.5 [m]) と表記する.円柱の加速度は右向きで, その大きさを a [m/s2 ] とし,円柱の角加速度を反時 計回りを正として ω˙ [rad/s2 ] とする. 図に示す通り円柱が受ける力は F ,重心における鉛直 下向きの重力 mg ,地面との接触点で水平方向に作用 する摩擦力 F (ここでは右を正とする),接触点で鉛 直上に作用する垂直抗力 R である. 以上から,円柱の運動方程式は F sin 45◦ + F = ma, 考え方 剛体の動力学解析 (教科書 6.6 節) では,並進運動の 基本式である Newton の運動方程式と回転運動の基 本式である Euler の運動方程式 (角運動方程式) を連 立させて解く (Newton-Euler 法). (4.1) 角運動方程式は (F − F )r = である. mr2 ω˙ 2 (4.2) • 最終的な答えは有効数値 3 桁で数値化しなければな また,円柱は滑ることなく転がることから, a = −rω. ˙ (4.3) 式 (4.3) を式 (4.2) に代入し, F − F = 1 ma. 2 (4.4) 式 (4.1) と式 (4.4) を両辺足しあわせて, √ 2 3 1+ F = ma 2 2 これを解いて, √ 2+ 2 F a= 3m これに m = 100,F = 300 を代入し,a = 2 + 3.41 [m/s2 ]. √ 2 配点・部分点 18 点.運動方程式・角運動方程式・転 がり拘束の式:各 4 点,変数設定等・残りの計算:6 点. • • • • r = 1 とした:−1 摩擦力をそもそも設定していない:−3 摩擦力の位置・方向を設定していない:−1 ω˙ を時計回りを正として定義しているがその旨を 明記していない:−1 • 転がり拘束の式 a = −rω˙ の符号が逆:−2 多かった間違い・補足 • 興味深いこととして,2 + √ 2 3.14 とした計算 ミスがすごい勢いで多発した.これをやってし まった人は,エンジニアとしての神経質さが足り ないという自覚を持つこと. できぐあい らないが,その計算は最後の最後に行うこと.途中途 中で何度も四捨五入を行うと,そのたびに四捨五入に よる誤差 (丸め誤差) が累積していき,最終回答にズ レが出ます. • 変な計算ミスがやたら多いようです.いつも言ってい るように,我々は少しでもややこしい問題につきあた ると,ほぼ必ずミスをします.これはプログラミング でも,機械設計や電子回路製作でも全く同じです.そ して,ミスを徹底的になくすチェックの努力を惜しむ ことによって,後々,チェックすることの数倍の努力 をかけてデバッグする結果につながることもしばしば です (井上研の卒論でも例年起こっている事態で,と きには数ヶ月スパンのロス (金額にして数十万) にな ります).特に,早めに試験会場を退出したにも関わ らず凡ミスが残っていた学生は反省して下さい. • 技術的な内容を相手に説明するための方法が理解でき ていないように思われる解答例が多いことが気がか り.例えば変数をきちんと定義しなければ,いくら式 を書いても相手にはそれがどういう式なのかが理解で きません.一般的な説明の方法については,例えば以 下の書籍などの安価な入門書があります. また,今後 (研究室でも会社でも) プレゼンなどの機 会が増えていくことを考えれば,プレゼンの参考書な ども今から読んで,パワポをどう作れば相手に伝わる のかの訓練を自分でこなしていくことも重要.森先生 の講義はあるものの,こういうのはいちいち大学教員 が手取り足取り細かいところまで教えてくれるもの ではないということが,のちのち分かってくると思い ます. 説明の厳密性と,説明に必要な情報をもれなく提示 することを神経質に実施することが求められるわけ です. 参考文献 平均得点率が 52% と低迷. 「必ず出す」と宣言して おいた Newton-Euler 法であり,またこの講義での中 心的な項目であるだけに,教員としてはかなり残念. できなかった人はきちんと Newton-Euler 法 (教科書 6.6 節) を復習しておいてください.もしかしたら期 末にも出すかもしれない. 全体的な注意点 • 力の表示方法を理解していない例が多い.平面上の力 学では,力は 2 次元ベクトルである.ということは, 力を記述するには (1) 2 つの直角分力を提示する,あ るいは (2) 力の大きさと方向を提示する,のいずれか を行う必要があります.この 2 つは情報量として等 価ですから,いずれかだけを行えば良いです (両方や るのは冗長).(1) を行っているなら力の大きさを示 す必要はないし,力の大きさを示したのであれば力の 方向もあわせて表示しなければ意味がありません. • 藤沢 晃治: 「分かりやすい説明」の技術,講談社ブルーバッ クス,864 円 以上
© Copyright 2026 Paperzz