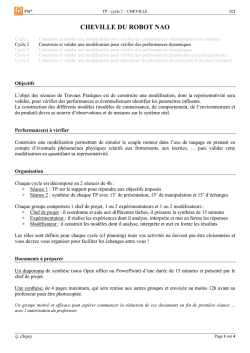
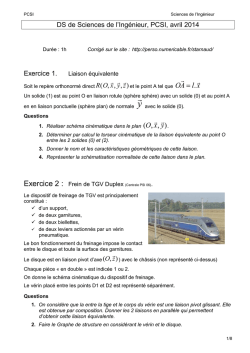
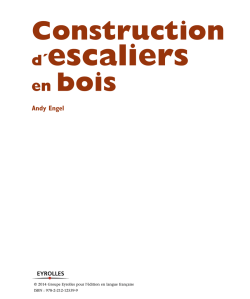
1ère année SLCI - TP diravi – sujet S2I L’objectif de ce TP est d’analyser fonctionnellement et structurellement le mécanisme de direction assistée afin de comprendre le fonctionnement de l’assistance et de mettre en évidence l’asservissement de position pour en proposer un modèle partiel de l’asservissement. Première partie : étude du fonctionnement Afin de pouvoir mettre en évidence les différentes fonctions de la direction assistée Diravi, procéder rigoureusement aux manipulations suivantes Manipulation 1 : Sur la station : • Mettre sous tension ( bouton vert sur le coté droit) puis patienter 3 secondes • Allumer la pompe (sur le pupitre) • Imposer une vitesse véhicule de 0 km/h soit une vitesse de 180 tr/min du régulateur (potentiomètre sur le pupitre) • Tourner le volant Manipulation 2 : renouveler la manipulation précédente pour une vitesse de 70 km/h correspondant à une vitesse de rotation du régulateur de 1200 tr/min et observer l’évolution des efforts nécessaires à la rotation du volant. Question 1 : Concluez sur l’évolution du couple en fonction de l’angle de braquage du volant et de la vitesse du véhicule simulée grâce au potentiomètre. Deuxième Partie : Analyse fonctionnelle de la direction assistée La direction assistée réalise trois fonctions : Assister le conducteur lors du braquage des roues à faible vitesse Durcir la direction en fonction de la vitesse et de l’angle de braquage Assurer le rappel des roues et du volant Question 2 : Vous devez compléter le diagramme FAST de la fonction Assister (cf document réponse). Pour le compléter, vous utiliserez les documents techniques ainsi que le mécanisme à disposition. Les éléments à placer dans ce diagramme sont donnés dans les deux tableaux « solutions techniques » et « Fonctions ». Page 1 sur 6 1ère année SLCI - TP diravi – sujet S2I Troisième Partie : Analyse de l’asservissement Structure globale (figure 1) A un couple à l’entrée exercé au niveau du volant correspond un pivotement des roues en sortie de l'ensemble : Direction assistée DIRAVI (ensemble présent sur la station) et éléments de commande des roues (Biellette et pivots de roue) appelé ici : Système de direction. Une autre entrée correspond à la valeur de la vitesse du véhicule, le couple de rappel du volant augmente en effet avec cette vitesse. Cvolant Dirαvi et Système de direction α roue Vvéhicule Figure 1 Direction assistée et Système de direction (figure 2) La représentation de la figure 2 permet d'isoler l'ensemble étudié ici : la Direction assistée DIRAVI. La grandeur de sortie de cet ensemble correspond au déplacement de la crémaillère de direction. λ C voλant a crémaiλλère Diravi roue Système de direction Vvéhicuλe Figure 2 Direction assistée DIRAVI (figure 3) La représentation de la figure 3 met en évidence une structure comportant deux blocs . Le premier est détaillé en figure 1 du document réponse, le second sera à mettre en place plus loin. C voλant Bλoc 1 Vvéhicuλe a volant Bλoc λ crémaiλλère 2 Diravi Figure 3 Le bloc 1 permet de mettre en évidence : - le système générant le couple de rappel du volant : c’est l’ensemble poussoir hydraulique +came cœur. - le système permettant la prise en compte dans le couple de rappel de la vitesse du véhicule : c’est le régulateur hydraulique. - le système reliant le couple au volant et son angle de rotation : c’est l’ensemble volant + Page 2 sur 6 1ère année SLCI - TP diravi – sujet S2I colonne de direction. Question 3 : Complétez le document réponse en donnant le nom des constituants du bloc1 situés sur les différentes chaînes du schéma fonctionnel. Donnez également un nom aux variables d’entrée et de sortie des blocs. L'objectif de la suite de ce travail sera de préciser la structure du bloc 2 à partir de l'analyse du fonctionnement d'une partie du bloc de commande (sans le système came poussoir) et de l'ensemble vérin crémaillère. Quatrième partie : Structure de la direction assistée Fonctionnement de l’assistance : Le schéma de la figure 4 représente les différents constituants, ainsi que les connexions hydrauliques associées. En plus du classique système mécanique de direction (volant, colonne de direction, pignon, crémaillère...), l'ensemble d'assistance est constitué: - d'une pompe hydraulique, entraînée par le moteur, associée à un réservoir d'huile, un accumulateur de pression et un bloc de régulation de débit / pression : conjoncteur - disjoncteur. - d'un bloc de commande qui détecte les actions exercées par le conducteur au niveau du volant pour commander la rotation des roues et provoque le couple de rappel, celui-ci variant en fonction de la position du volant; - d'un régulateur centrifuge, qui permet de faire varier le couple de rappel du volant en fonction de la vitesse du véhicule; - d'un vérin hydraulique d'assistance, commandant la crémaillère de direction et donc la rotation des roues. λc ,Fc RESERVOIR B.P. Figure 4 : schéma d'implantation des composants de la direction VERIN - CREMAILLERE ωr POMPE pv REGULATEUR centrifuge ph ACCUMULATEUR H.P Disjoncteur Conjoncteur BLOC de COMMANDE pr VOLANT θv Cv Page 3 sur 6 1ère année SLCI - TP diravi – sujet S2I Figure 5 : structure du bloc de commande La rotation du volant doit commander le déplacement du tiroir du distributeur du vérin de crémaillère. Un couple exercé sur le volant fait tourner le plateau (P1) par l'intermédiaire du pignon arbré (1). Le couple de résistance au pivotement du sol sur les roues empêche la rotation de l'arbre (2) donc du plateau (P2) (dans la limite du jeu autorisé par le doigt lié à (1) dans la rainure de (2). Les biellettes (B) en s'inclinant commandent la translation du tiroir (T). Selon le sens de son déplacement. Question 4 : Pour chacune des phases proposées, dessinez sur le document réponse le distributeur actionnant les biellettes, ainsi que son sens de déplacement et décrire succinctement le fonctionnement. • Phase de braquage: le conducteur fait tourner le volant. • Phase de retour en position d'équilibre: le conducteur maintient le volant dans une position. Modélisation de l’asservissement : Étude du bloc 2 Le bloc 2 issue de l’analyse de l’asservissement permet d’asservir le déplacement de la crémaillère à l’angle de rotation du volant. la boucle de retour de l'asservissement est réalisée par l'intermédiaire de la roue dentée qui commande le plateau P2. L'information angulaire obtenue est alors comparée à l'angle de rotation du volant (donnée par le plateau P1) à l'aide du mécanisme de biellettes (B). C'est le comparateur. Le schéma fonctionnel du bloc est de la forme suivante : Compαrαteur α vol Engrenαge E1 α Plαteαux α−α' Biellettes (B) l dist Distributeur (T) α' Engrenαge E2 α pignon Q vérin Vérin l crémαillère Pignon crémαillère Figure 6 : schéma fonctionnel du bloc 2 Page 4 sur 6 1ère année SLCI - TP diravi – sujet S2I Question 5 : Sur le document réponse, définissez chacune des fonctions de transfert du diagramme fonctionnel du bloc 2 en s’aidant des données constructeur fournies en annexe en caractère gras. On supposera que dans une phase de braquage, le débit d’huile sous pression alimentant le vérin est proportionnel au déplacement du tiroir du distributeur (gain K). Question 6 : Calculez la fonction de transfert en boucle fermée du bloc 2 en utilisant les données numériques constructeur. Vous veillerez à respecter l’homogénéité des résultats et exprimerez cette FTBF en fonction de K. Page 5 sur 6 1ère année SLCI - TP diravi – sujet S2I ANNEXES DIRAVI - CARACTERISTIQUES TECHNIQUES Pompe hydraulique Volumétrique à 5 pistons Disjoncteur Conjoncteur P disjonction : 17 ± 0.5 Mpa P conjonction: 14.5 ± 0.5 Mpa Bloc de commande Engrenage comparateur : ZP1 = ZP2 = 60 dents; Zpignon1 = Zpignon2 = 36 dents m = 1.25 Engrenage came : Z28 = 59 dents ; Z9’ = 15 dents ; m = 1.25 Pignon crémaillère Z = 10 dents ; m réel = 1.6 mm Came : caractéristiques en annexe Crémaillère Course = ± 82 mm Résistance passive < 1500 N Régulateur centrifuge Pression en fonction de la vitesse du véhicule : voir en annexe Relation vitesse du véhicule (Km/h) et vitesse du régulateur (t/mn) :Nrégul = 16.66 Vvéhic Système résistant Caractéristiques du ressort : •13 spires utiles • d=11mm (diamètre du fil) • D=80mm (diamètre moyen d’enroulement) • Lo=376,6 mm long. libre ressort Débit théorique 6 l/mn à 1450 t/mn sur le véhicule et 1.9 l/mn à 400 t/mn sur la station Réservoir (sphère) Volume : 400 cm3 P gonflage : 6.2 Mpa (azote) P maxi utilisation : 22.7 MPa Couple au volant en fonction de l’angle voir les tableaux et courbes en annexe. Tiroir : déplacement environ 6 mm Volant : rotation ± 620° rayon 190 mm débattement libre sans assistance ± 15° Frottement dans le boitier sans assistance < 0.65 Nm au volant Section chambre 2 : 6 cm² Section chambre 1 : 12 cm² Couple au volant en fonction de sa rotation : voir les tableaux et courbes en annexe. • L2=241,5 mm correspond à la précharge maximale , l’écrou étant vissé pour un réglage maximun (volant en position neutre) • L3=159,5 correspond à la précharge maximale, l’écrou étant vissé pour un réglage maximun (crémaillère sortie totalement vers la droite) Instrumentation Capteurs : voir la documentation en annexe Moteurs : - entrainement du régulateur - entrainement de la pompe Loi entrée / sortie des « biellettes » Déplacement du tiroir (mm) 3 0 rotation relative des plateaux (degré) -2 -8.4 0 4.2 Page 6 sur 6
© Copyright 2026 Paperzz