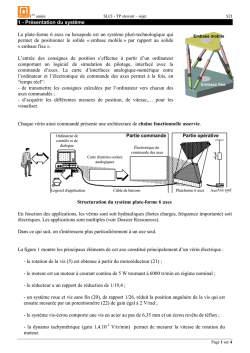
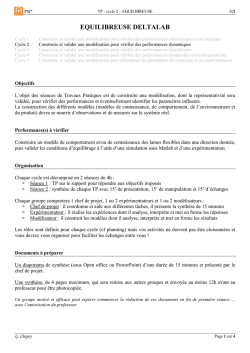
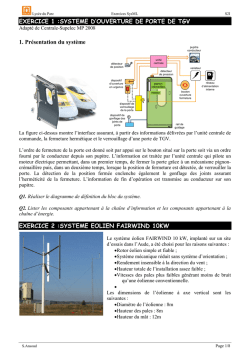
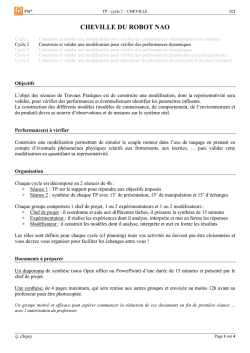
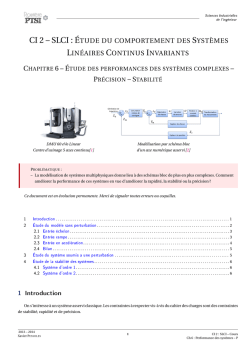
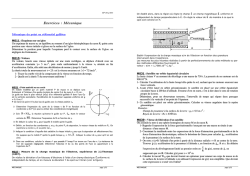
Lycée du Parc TD SLCI : réponse temporelle S2I EXERCICE 1 :TRANSFORMEE DE LAPLACE DE SIGNAUX Q1. Déterminer l’équation temporelle des signaux suivants puis en déduire leur transformée de Laplace. g(t) e(t) a aT t T h(t) τ 2τ t 3τ 1 f(t) mT T 2T T t t T/2 -1 EXERCICE 2 :RESOLUTION D’UNE EQUATION DIFFERENTIELLE PAR TRANSFORMEE DE LAPLACE Un système linéaire continu invariant (entrée e(t) et sortie s(t)) est régi par l'équation différentielle : ds( t ) d ²s( t ) de( t ) +3 + 2 s( t ) = 7 + 11 e( t ) avec des conditions initiales nulles. dt ² dt dt Q1. Calculer la fonction de transfert H(p) de ce système. Q2. Déterminer l'équation de s(t) pour une entrée e(t) égale oà une impulsion oà un échelon unité. EXERCICE 3 :EXERCICE 3 : SCHEMA-BLOC Q1. Compléter les schémas 2 et 3 suivants, en donnant un nom à chaque bloc. o Schéma 1 Exemple de système non asservi : Commande de température d'un four de S.Ansoud Schéma 2 Système asservi : Régulation de température d'un four de traitement de pièces Page 1/16 Lycée du Parc TD SLCI : réponse temporelle S2I Commande asservie de position longitudinale d'un axe EXERCICE 4 :MANIPULATION DE SCHEMA-BLOC H3(p) S(p) E(p) G1(p) G2(p) G3(p) H2(p) H1(p) Q1. Réduire ce schéma sous la forme ci-contre: Q2. Préciser F(p) et G(p). E(p) F(p) S(p) G(p) Q3. Déterminer la fonction de transfert équivalente du schéma-bloc ci-dessous : S.Ansoud Page 2/16 Lycée du Parc TD SLCI : réponse temporelle S2I EXERCICE 5 :MOTEUR HYDRAULIQUE LINEAIRE Le schéma ci-dessous décrit le système étudié : un moteur linéaire hydraulique. Pas de fuite, Pas de frottement Pas de fuite x x Pas de fuite Piston qf Pas de frottement Chambre 1 q Tige Chambre 2 Pas de frottement Frottement visqueux Chariot Bâti Pas de fuite, Pas de frottement i Servo-valve + réservoir Ce moteur transforme l’énergie hydraulique en énergie mécanique. Il est formé de deux chambres (notées chambre 1 et chambre 2) qui sont séparées par un piston, de section effective S et percé d’un trou de fuite de section faible par rapport à S . Le piston, par l’intermédiaire de la tige, est solidaire d’un chariot de masse M dont le déplacement est repéré par x . S = 8.10−3 m 2 et M = 103 kg dx - Le frottement entre le chariot et le bâti est de type visqueux tel que l’effort de frottement vaut − µ . . dt µ = 2,5.104 N .s.m −1 - La circulation du fluide, supposé incompressible, est assuré par une servo-valve dont le débit volumique q est proportionnel au courant de réglage i tel que q = k .i . k = 5.10−5 m3 .s −1. A−1 - On note p1 et p2 les pressions dans les chambres 1 et 2 à l’instant t. - Le débit de fuite q f entre les chambres 1 et 2 est supposé obéir à la loi des écoulements laminaires : = q f R. ( p1 − p2 ) avec R = S2 µ Q1. Etablir la relation entre les débits volumiques q et q f et le déplacement x . Q2. Dresser la liste des actions mécaniques extérieures auxquelles est soumis l’ensemble Piston-Tige Chariot. Sélectionner dans cette liste celles qui ont une action dans la direction du déplacement x . Q3. Exprimer la résultante de l’action mécanique globale (chambres 1 et 2) du fluide sur le piston dans la direction x . Exprimer cette action en fonction de q f . Q4. Appliquer le Principe Fondamental de la Dynamique à l’ensemble Piston-Tige-Chariot, en résultante, dans la direction x . Q5. Transformer les équations q = k .i , l’équation obtenue en Q1, et l’équation obtenue en Q4 dans le domaine de Laplace avec les notations habituelles. S.Ansoud Page 3/16 Lycée du Parc TD SLCI : réponse temporelle S2I Q6. Tracer un schéma bloc qui traduit graphiquement les 3 relations obtenues à la question précédente. On choisira I ( p ) comme grandeur d’entrée et X ( p ) comme grandeur de sortie. X ( p) . Donner l’ordre de H ( p ) , la classe de H ( p ) I ( p) ainsi que les paramètres caractéristiques. Faire les applications numériques et préciser les unités. Vous en vérifierez la cohérence. Q7. Exprimer la fonction de transfert H ( p ) = Q8. Déterminer la vitesse (stabilisée) atteinte par le chariot lorsque l’entrée est de type i (t ) = i0 .u (t ) . Déterminer également la vitesse à l’origine ainsi que son accélération. EXERCICE 6 :MOTEUR A COURANT CONTINU B (S) i (R) f Cm i f Un moteur électrique à courant continu commandé par l’induit est constitué d’un rotor (R) et d’un stator (S). Le stator comprend des aimants permanents qui soumettent le rotor à un champ magnétique B fixe. Le rotor comprend un bobinage traversé par un courant continu i. Une spire seulement est représentée sur le schéma. Le courant circulant dans le champ magnétique crée une force induite f = B ∧ il ( l longueur du fil orienté dans le sens du courant) sur chaque fil du bobinage. L’ensemble des forces induites crée un couple moteur Cm qui fait tourner le moteur. Le sens des courants traversant chaque fil est piloté par un collecteur afin que les conducteurs de gauche et de droite sur le schéma soient toujours traversés par un courant de même sens. Le couple moteur ainsi créé est proportionnel à l’intensité du courant qui traverse le bobinage: Cm(t)= Kc.i(t) avec Kc constante de couple. L R i(t) La modélisation électrique du circuit est la suivante : u(t): tension de commande du moteur e(t): force électromotrice induite du moteur u(t) L: auto-inductance du circuit induit R: résistance totale du circuit induit La vitesse de rotation ω (t) du rotor par rapport au stator est proportionnelle à la force électromotrice induite e(t): e(t)=Ke.ω(t) avec Ke constante de force électromotrice. e(t) Le rotor est en liaison pivot par rapport au stator. Cette liaison se fait avec frottements. L’ensemble des frottements de la liaison exerce un couple résistant Cr(t) sur le rotor. On suppose que Cr(t) est proportionnel à ω (t): Cr(t)= b. ω (t) avec b coefficient de frottement visqueux. S.Ansoud Page 4/16 Lycée du Parc TD SLCI : réponse temporelle S2I Dans le cas où le moteur fonctionne à vide, il n’a à vaincre que ses frottements internes. Le principe fondamental de la dynamique appliqué au rotor s’écrit: Cm (t) - Cr (t) = J dω (t) dt avec J inertie du rotor. Q1. mise en équation : Exprimer dans le domaine symbolique les équations qui régissent le fonctionnement du système. Représenter pour chaque équation le schéma-bloc correspondant. Q2. Représenter le schéma fonctionnel du système asservi en vitesse : entrée U(p), sortie Ω(p). Q3. simplification : pour cette question uniquement, on suppose que b=0 et KC=KE=K, ce qui est vérifié en pratique. On définit Tm = RJ K² constante de temps mécanique et Te = L R constante de temps électrique du moteur. Calculer la fonction de transfert H1( p) = H1 ( p) = Ω( p) U ( p) et montrer que si Tm >> Te, On a 1/ K (1 + Tm p)(1 + Te p) Q4. perturbations : le moteur électrique est maintenant couplé à une charge qui exerce un couple résistant Cr’(t) sur le rotor. Cr’(t) a un comportement inconnu, il est considéré comme une perturbation pour le moteur. Soit θ (t) la position angulaire du rotor par rapport au stator. ω (t ) = dθ (t ) dt . Représenter le schéma fonctionnel du système asservi en position : entrées U(p) et Cr’(p)=L[Cr’(t)], sortie Θ(p)=L[θ(t)]. Exprimer Θ(p) en fonction de U(p) et Cr’(p) en faisant apparaître les deux fonctions de transfert du système. EXERCICE 7 :REGULATION DE NIVEAU La figure suivante représente une régulation de niveau d’eau h(t) dans un réservoir. S.Ansoud Page 5/16 Lycée du Parc TD SLCI : réponse temporelle S2I On suppose que toutes les conditions initiales sont nulles. Q1. Appliquer, pour chacun des modèles de connaissance des constituants du système, la transformation de Laplace. Puis indiquer sa fonction de transfert, et enfin en déduire son schémabloc. Le modèle de connaissance du potentiomètre (interface H/M) n'est jamais donné dans les sujets de concours, il faut donc être capable de le retrouver ! Q2. Donner cette relation entre hc(t) et uc(t) qui assure que ε(t) soit bien une image de l’erreur du niveau d’eau. En déduire le schéma-bloc correspondant au potentiomètre. La relation entre vitesse angulaire ωm(t) et θm(t) position angulaire du moteur, n'est aussi jamais donnée dans les sujets de concours, il faut donc la connaître. Q3. Donner donc en précisant les unités, cette relation temporelle générale qui lie vitesse et position. En déduire le schéma-bloc qui passe de Ωm(p) à Θm(p). Q4. Donner la variable d’entrée et la variable de sortie du système. Puis, représenter le schéma-bloc du système entier en précisant le nom des constituants sous les blocs, ainsi que les flux d’énergie ou d’information entre les blocs. Q5. Déterminer les fonctions de transfert F1(p) = H(p) H(p) et F2(p) = Qs(p) Hc ( p )=0 H c(p) Qs ( p )=0 Q6. En déduire, à l’aide du théorème de superposition, l’expression de H(p) en fonction de QS(p) et Hc(p) S.Ansoud Page 6/16 Lycée du Parc TD SLCI : réponse temporelle S2I EXERCICE 8 :ASSERVISSEMENT DE POSITION La figure représente un système qui permet d’asservir la position de l’arbre d’un motoréducteur à la position d’un potentiomètre. Ce système est composé de : • 2 potentiomètres (commande (e) et recopie (s)) qui autorisent une rotation de 6 radians et sont alimentés par une tension E = 6 V. Les tensions Ve et Vs varient entre 0v et 6v, proportionnellement à l’angle θe ou θs de rotation du curseur. • Un comparateur A1 à AOP avec R1 = 1 kΩ et R2 = 100 kΩ . • Un amplificateur de puissance A2 à AOP monté en suiveur avec une résistance de sortie Rs = 5 Ω . • Un motoréducteur à courant continu, pour lequel l’inductance de l’induit est négligée. D’un point de vue électrique le motoréducteur se comporte comme une résistance Rm = 25 Ω mise en série avec un générateur de tension e. On donne e = K.Ωs et C = K.i où C et Ωs désignent le couple et la vitesse de rotation de l’arbre de sortie et K = 0.2 Vs/rad. On note J = 10-4 (kg.m2), le moment d’inertie de l’équipage mobile solidaire de l’arbre de sortie. Les frottements sont négligés. Q1. Exprimer la tension V3(p) en fonction de Ve(p) et de Vs(p). Traduire l’équation obtenue sous la forme d’un schéma bloc. Q2. Etablir la transmittance des potentiomètres de commande P1 et de recopie P2. Donner les schémas bloc correspondants. Q3. établir une relation entre le courant I(p) dans le moteur, sa vitesse Ωs (p) et la tension V3(p). La loi fondamentale de la dynamique s’écrit, si on néglige tous les frottements mécaniques : dω (t) C(t) = J s dt Q4. En appliquant cette loi et en utilisant le résultat de la question précédente, montrer que la Ω (p) 5 transmittance de l’ensemble (ampli A2 + moteur) s’écrit : H(p) = s = V3(p) 1 + 0.075 p S.Ansoud Page 7/16 Lycée du Parc TD SLCI : réponse temporelle S2I Q5. Compléter le schéma fonctionnel du système ci-dessous et en déduire sa transmittance en boucle ouverte T(p). θe Ve θs Ωs V3 Vs Q6. Donner l’expression de la transmittance en boucle fermée de l’asservissement et calculer son amortissement m. Q7. Conclure quant à son comportement en réponse à un échelon. Pour améliorer le fonctionnement de l’asservissement, on introduit un correcteur entre le comparateur et l’amplificateur de puissance selon le schéma suivant : Q8. établir la relation entre v4(t) et v3(t) puis la transmittance V4(p) . V3(p) Q9. Donner l’expression de la transmittance de boucle Tc(p) du système corrigé. Sachant que R = 39 kΩ, calculer la valeur de C pour que la transmittance en boucle ouverte se réduise à un simple intégrateur. Q10. En déduire l’expression de la transmittance en boucle fermée T’c(p) et caractériser la réponse indicielle du système ainsi corrigé. S.Ansoud Page 8/16 Lycée du Parc TD SLCI : réponse temporelle S2I EXERCICE 9 :ASSERVISSEMENT D’UN FOUR On étudie l'asservissement de température représenté par le schéma de principe de la figure ci-dessous : P est le potentiomètre d'entrée (consigne) TC est un thermocouple utilisé comme capteur pour contrôler la température à l'intérieur du four. A, B et C sont des amplificateurs électroniques Le four est à chauffage électrique. L'étude des différents éléments constituant cette régulation a permis d'établir les relations suivantes : potentiomètre P : v e = k e .Te amplificateur A : v = k a .(v e − v s ) amplificateur B : u = k b .v amplificateur C : v s = k c .v T où k e , k a , k b et k c sont des constantes. Le four est caractérisé par une fonction de transfert de la forme : Ts ( p ) kf = U ( p ) 1 + T1p Ts étant la température à l'intérieur du four et U la tension d'alimentation des éléments chauffants fournie par l'amplificateur de puissance B. Le thermocouple TC délivre une tension VT , sa fonction de transfert étant de la forme : VT ( p ) kT = Ts ( p ) 1 + T2 p Q1. Dessiner le schéma bloc détaillé de cet asservissement en faisant apparaître la fonction de transfert de chaque élément, et les différentes grandeurs physiques. Q2. Montrer que ce schéma bloc peut se ramener à celui d'un système bouclé de la forme ci-dessous et donner l’expression des transmittances G(p) et H(p). Te (p) + - G(p) Ts (p) H(p) S.Ansoud Page 9/16 Lycée du Parc TD SLCI : réponse temporelle Q3. Calculer l’expression de la fonction de transfert en boucle fermée : L( p ) = S2I Ts ( p ) Te ( p ) Faire l’application numérique suivante : k e = 0,05volt / °c k f = 4°c / volt k a = 4,5 T1 = 40s k b = 10 kT = 40 µvolt / °c k c = 1250 T2 = 1s Q4. Calculer le temps d’établissement (ou temps de réponse à 5%) de Ts (t ) du système, à un échelon de position d’entrée Te (t ) = 100°c . Construire avec précision cette réponse. EXERCICE 10 :IDENTIFICATION TEMPORELLE PAR UN ESSAI Un thermomètre à mercure est un système supposé linéaire qui relie la température réelle tempr , fonction du temps, à la graduation tempg, gravée sur le thermomètre. La figure ci-dessous donne le schéma fonctionnel On suppose la fonction de transfert de la forme : tempg ( p ) (1 + b1 p + b 2 p ² + ...) =K tempr ( p ) (1 + a1 p + a 2 p ² + ...) On veut avoir, en régime permanent (après avoir attendu la stabilisation de la colonne de mercure) tempg = tempr. Q1. Quelle doit être la valeur de K ? Le thermomètre , initialement à 20 ° C (son point de repos) est brusquement plongé dans un bain à 10 degrés. On lit les résultats suivants :T (secondes) 0 2 10 15 20 25 Tempg(°C) 20 17.8 16.1 14.7 13.7 12.9 Q2. oDessiner succinctement tempg(t) oA quel signal d’entrée le système est-il soumis ? oEn supposant que le modèle du thermomètre est du premier ordre, quelle est sa constante de temps? Donner numériquement la fonction de transfert. Maintenant, ce thermomètre est mis dans un four à la température de 0°C. On attend la stabilisation de la colonne de mercure, puis on fait monter linéairement la température du four. Tempr(t) = a t avec a = 0.1 °C/seconde Q3. Quelle est, en régime permanent, la différence entre la température réelle à un instant donné et la température lue sur la graduation ? EXERCICE 11 : IDENTIFICATION DE FT Ci-dessous, on donne les entrées ei(t) et les réponses si(t) de trois systèmes. S.Ansoud Page 10/16 Lycée du Parc TD SLCI : réponse temporelle S2I 1 – Déterminer graphiquement H1(p) et H2(p) puis vérifier le temps de réponse. 2 – Choisir (en justifiant) H3(p) parmi les propositions suivantes : H31(p) = 5 5 500 H32(p) = H33(p) = 2 1+ 2 p 1 + 0, 5 p + 0, 25 p 100 + ap + 25 p 2 s1(t) e1(t) t en s s2(t) e2(t) t en ms S.Ansoud Page 11/16 Lycée du Parc TD SLCI : réponse temporelle S2I s3(t) e3(t) t en s Document annexe : S.Ansoud Page 12/16 Lycée du Parc TD SLCI : réponse temporelle S2I EXERCICE 12 :ETUDE D’UNE SERVOCOMMANDE D’HELICOPTERE Pour déplacer un hélicoptère dans un plan horizontal, le pilote agit sur un manche dit « pas cyclique ». Ce manche agit par l’intermédiaire d’une tringlerie sur une servocommande. Cette dernière exerce par son actionneur un effort sur le plateau cyclique, mécanisme chargé de faire varier l’angle de pas des pales de manière continue sur un tour de rotor. La servocommande ci-dessous est un système d’asservissement en position, à entrée mécanique. Elle est composée d’un distributeur à tiroir pilotant un vérin à corps mobile. Le tiroir du distributeur reçoit la consigne Ze. Celle-ci provient de la tringlerie de commande. Ce tiroir coulisse dans le corps du distributeur et met en communication chacune des deux conduites a et b avec la pression d’alimentation p1 ou la pression de retour p0 . Les deux chambres Ca et Cb sont alimentées avec deux pressions différentes, ce qui a pour conséquence de déplacer le corps et générer la sortie Zs. Ze la consigne d’entrée Zs la réponse en sortie P1 la pression d’alimentation P0 la pression de retour Pa et Pb les pressions dans les chambres Ca et Cb de volumes Va et Vb Vt = (Va + Vb)/2 On montre a- équation de débit : K d ( Z e (t ) − Z s (t ))= S rc,f et m les raideurs, coefficients de frottement visqueux et masse de l’ensemble vérin plus charge Kd le gain du distributeur B le module de compressibilité de l’huile S la section utile du vérin dZ s (t ) Vt d ( pa (t ) − pb (t )) + dt dt 2B (1) b- équation de dynamique appliquée au corps de vérin : S ( pa (t ) − pb (t )) = rc Z s (t ) + f S.Ansoud dZ s (t ) d 2 Z s (t ) (2) +m dt dt 2 Page 13/16 Lycée du Parc TD SLCI : réponse temporelle S2I Q1. Ecrire l’image de chaque équation (1) et (2) par la transformation de Laplace en considérant que toutes les conditions initiales sont nulles. Remarque : Pour une fonction scalaire f de variable temporelle t, on notera F sa transformée de Laplace, dont la variable sera notée p. Q2. Déterminer la fonction de transfert en boucle ouverte, Hbo(p), de la chaîne fonctionnelle Z s ( p) Z s ( p) représentée ci-dessous. Remarque : Hbo(p) s’écrit= ici : H bo ( p ) = Z e ( p) − Z s ( p) ε ( p) Ze ε + - Zs Hbo(p) K 2 BS 2 En posant : rh = et ω = d , exprimer Hbo(p) en fonction de rc,rh,f,m et ω. Vt S Q3. Application numérique : rc=rh=2.10 7N/m ; f=10 5Ns/m ; m=250 kg ; ω=200 rad/s Dans le domaine fréquentiel d’utilisation de ce système, comme m/ rh est très petit devant 1, Hbo(p) K peut se mettre sous la forme . Exprimer alors numériquement Hbo(p). p (1 + τ p ) Pour la suite on prendra les valeurs suivantes :K = 100 et τ = 1/400 (s) Q4. En déduire la fonction de transfert en boucle fermée Hbf(p) du système ayant pour entrée Ze et pour sortie Zs. Mettre Hbf(p) sous sa forme canonique. Q5. Déterminer algébriquement la réponse du système à une entrée en échelon Zo u(t) où 0 si t < 0 1 est la fonction échelon unitaire et Zo ∈ R. (on donne L(t.e − at .u (t )) = ) u (t ) = ( p + a )² 1 si t ≥ 0 Q6. Tracer l’allure de la courbe représentative de la réponse ci-dessus. Q7. Préciser la valeur de l’écart statique en position et du temps de réponse à 5% (utiliser l’abaque cidessous). S.Ansoud Page 14/16 Lycée du Parc TD SLCI : réponse temporelle S2I Une augmentation du gain de la fonction de transfert en boucle ouverte a permis de modifier la réponse du système. Q8. Dans ce cas, la réponse du système en boucle fermée à l’échelon précédent est représentée cidessous. Trouver par lecture de cette courbe, le temps de réponse à 5%, l’écart statique en position et le premier dépassement. Quelles sont les conséquences de l’augmentation du gain sur le comportement du système ? La servocommande est munie d’un dispositif de correction dit « à retour de pression ». voir figure ci-dessous. Ce dispositif est constitué d’une canalisation de petite section qui relie les deux chambres du vérin. Il permet de « compenser » le débit d’huile introduit par le distributeur au cours d’un dépassement de position (oscillation). La fonction en boucle ouverte du système devient H bo ( p ) = 2.105 . (400 + p )(500 + p ) + p L’entrée du système est l’échelon Zo u(t) où u(t) est la fonction échelon unitaire et Zo ∈ R. Q9. Exprimer algébriquement l’image de l’écart par la transformation de Laplace : = ε ( p ) Z e ( p ) − Z s ( p ) , puis l’écart statique en position εs . L’exprimer en pourcentage de Zo . Q10. La réponse indicielle du système corrigé est représentée ci-dessous. Quels sont les avantages et inconvénients du système de correction utilisé ? S.Ansoud Page 15/16 Lycée du Parc S.Ansoud TD SLCI : réponse temporelle S2I Page 16/16
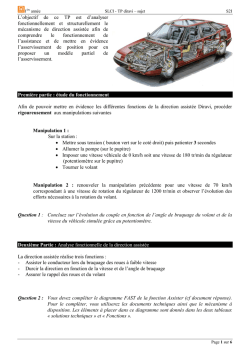
© Copyright 2026 Paperzz