Corrigé
ROBOT ERICC 3
C3 Modéliser et résoudre pour vérifier les performances statiques et cinétiques de systèmes de solides
1 STRUCTURE ET MODELISATION DE L’AXE DE L’EPAULE
Q1 : A partir du fichier e-drawing fourni, proposer un schéma architectural de cette liaison en
justifiant les modèles de liaison retenus et valider alors le modèle cinématique minimal.
Comme tous les éléments roulants, les roulements à rouleaux coniques présentent un angle de
rotulage interne donc chaque élément roulant est modélisable par une liaison sphérique ou une
sphère-cylindre. Ici, chaque bague (intérieur et extérieure) est également arrêtée en translation
(voir les ).
Ils sont donc tous les deux modélisables par des liaisons sphériques.
Ce modèle n’autorise qu’une seule rotation donc le modèle cinématique minimal correspondant est
une liaison pivot.
Q2 : Proposer un modèle de liaison entre l’axe de la poulie motrice et la chaise.
Pivot d’axe 𝑦
Q3 : Quelle est l’utilité de l’excentricité du cylindre de centrage du porte outil sur la chaise et l’axe
de la poulie.
Réglage de la tension de la courroie
2 LE REDUCTEUR HARMONIC DRIVE
Pour plus de précision, visiter le site http://www.harmonicdrive.de/ et visualiser la vidéo de
présentation de ce réducteur.
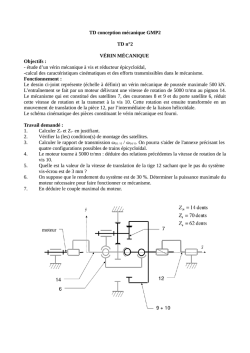
Q4 : Donner le nom des composants A, B, C d’un réducteur Harmonic Drive.
A : Wave generator
B : Flexspline
C : Circular spline
Sciences industrielles pour l’ingénieur
2
ème
Année
1 sur 4
ROBOT ERICC 3
Q5 : Les composants B et C du réducteur possèdent respectivement 200 et 202 dents. Trouver le
rapport de réduction sachant que C est immobilisé, A la pièce d’entrée et B la pièce de sortie.
𝜔!/! 𝑍!
𝜔!/! − 𝜔!/!
−𝜔!/!
=
= 𝜆 = 0,99 ⇒
=𝜆⇒
= 𝜆 ⇒ −𝜔!/! = 𝜆 𝜔!/! − 𝜔!/!
𝜔!/! 𝑍!
𝜔!/! − 𝜔!/!
𝜔!/! − 𝜔!/!
𝜔!/!
𝜆−1
⇒ 𝜔!/! 𝜆 − 1 = 𝜆𝜔!/! ⇒ 𝑟 =
=
= −0,01
𝜔!/!
𝜆
Q6 : Citer les principaux avantages de ce réducteur.
•
•
•
Grand rapport de réduction par rapport à l’encombrement
Rendement élevé
Précision importante
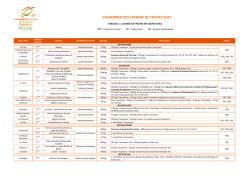
Q7 : Déterminer les différents rapports de réduction possibles en fonction des différentes
configurations en prenant en compte le modèle cinématique équivalent ci dessous :
Entrée
Sortie
Fixe
A
B
C
A
B
C
C
B
A
B
A
C
C
B
A
C
A
B
Rapport Sortie/Entrée
𝜆−1
𝑟=
= −0,01
𝜆
𝑟 = 1 − 𝜆 = 0,01
𝑟 = 𝜆 = 0,99
𝜆
𝑟=
= −100
𝜆−1
1
𝑟 = = 1,01
𝜆
1
𝑟=
= 100
1−𝜆
3 PERFORMANCE STATIQUE DE LA TRANSMISSION
Y
3.1 Application du Principe Fondamental de la
Statique
On charge l’extrémité du bras par une masse M.
O
Q8 : Proposer une méthode permettant d’évaluer analytiquement le couple
de maintien en position horizontale du bras sur l’axe de l’épaule dans une
première étape, puis sur l’axe du moteur dans un second temps. Donner
l’expression de ce couple de maintien.
•
On isole l’ensemble {bras 2 + avant-bras 3 + pince + charge}.
•
Bilan des AME (on se place en problème plan) :
AM de la pesanteur sur le bras, l’avant-bras et la charge respectivement en G2, G3 et M (poids de
la pince négligée)
0
0
𝒯 𝑝𝑒𝑠 → 2 =
−𝑚! 𝑔 0
0
0 !,!,!
!!
𝒯 𝑝𝑒𝑠 → 3
=
!!
0
−𝑚! 𝑔
0
𝒯 𝑝𝑒𝑠 → 𝑐ℎ𝑎𝑟𝑔𝑒
=
!
Sciences industrielles pour l’ingénieur
0
0
0
0
−𝑀𝑔
0
2
ème
!,!,!
0
0
0
!,!,!
Année
2 sur 4
X
ROBOT ERICC 3
AM transmissible par la liaison pivot d’axe (O,𝑧) entre la chaise et le bras :
𝒯 𝑐ℎ𝑎𝑖𝑠𝑒 → 2
=
!
𝑋
𝑌
𝑍
𝐿
𝑀
0
!
!,!,!
AM de maintien sur le bras en O :
𝒯 𝑚𝑎𝑖𝑛𝑡𝑖𝑒𝑛 → 2
=
!
•
𝑋
𝑌
0
=
0
0
0
0
0
0
(𝑑𝑎𝑛𝑠 𝑙𝑒 𝑝𝑙𝑎𝑛)
!,!,!
0
0
𝐶!!"#
!,!,!
On applique le théorème du moment autour de l’axe (O,𝑧) : 𝑀! Σ → Σ . 𝑧 = 0
𝒯 𝑝𝑒𝑠 → 2
0
−𝑚! 𝑔
0
=
!!
𝒯 𝑝𝑒𝑠 → 3
=
!!
0
−𝑚! 𝑔
0
𝒯 𝑝𝑒𝑠 → 𝑐ℎ𝑎𝑟𝑔𝑒
0
0
−0,064. 𝑚! 𝑔
=
!
0
0
0,452. 𝑚! 𝑔
0
−𝑀𝑔
0
!,!,!
!,!,!
0
0
0,740. 𝑀𝑔
!,!,!
𝑀! Σ → Σ . 𝑧 = 0 ⇒ 𝐶!"#$ − 0,064. 𝑚! 𝑔 + 0,452. 𝑚! 𝑔 + 0,740. 𝑀𝑔 = 0
Attention, ce couple de maintien est directement sur l’axe de l’épaule. Il faut tenir compte du rapport
de réduction du réducteur harmonicdrive et du système poulie-courroie pour déterminer le couple
de maintien du moteur !!!
Q9 : A l’aide d’un tableur, déterminer alors pour différentes valeurs de la masse M (0 ; 0,5 ; 1 ; 1,5 ;
2 ; 2,5 ; 3 ; 3,5 kg) la valeur du couple de maintien sur l’axe du moteur. Ce couple «théorique» sera
noté Cth.
Masse (kg) Couple maintien(Nm) Couple réducteur (Nm) Couple théorique (Nm)
0
8
2,4
0,024
0,5
11,6
3,49
0,0349
1
15,3
4,58
0,0458
1,5
18,9
5,67
0,0567
2
22,5
6,76
0,0676
2,5
26,2
7,85
0,0785
3
29,8
8,93
0,0893
3,5
33,4
10,02
0,1
Le moteur le l’axe de l’épaule est équipé d’un frein à coupure de courant.
Q10 : Expliquer succinctement le principe d’un tel frein.
•
•
Evite l’alimentation du moteur en continu pour maintenir le bras au repos. Il n’est désactivé
que lorsqu’on commande un déplacement du bras.
Sécurité lors de coupure de courant.
On cherche à mesurer le couple disponible sur l’axe du moteur. Celui-ci n’est pas mesuré
directement.
Q11 : Pour un moteur à courant continu, quelle est la grandeur électrique qui permettra d’évaluer le
couple moteur ? Imoteur
Sciences industrielles pour l’ingénieur
2
ème
Année
3 sur 4
ROBOT ERICC 3
3.2
Mesure du couple moteur
Pour soulager le moteur, le frein est en service lorsque le bras est immobile.
Par conséquent pour pouvoir évaluer le couple moteur il faut lancer un programme qui consiste à
faire varier légèrement le paramètre θ2 (± 5°) autour de sa valeur de référence.
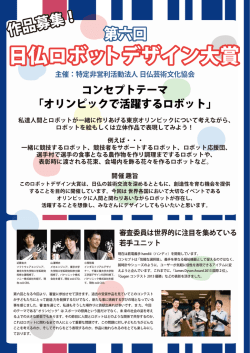
Le résultat de cette mesure pour une masse à déplacer nulle est fourni sur la courbe suivante :
0,9A
Q13 : Relever la valeur du courant dans le cas le plus défavorable pour le moteur, c'est-à-dire
lorsque le bras remonte et lorsqu’il se situe aux alentours de la position de référence.
Imoteur=0,9A
Q14 : Calculer le couple moteur Cmes et le comparer au couple théorique Cth . Donner une
explication probable à la différence, et que peut-on dire de cette différence ?
Cmes=Kc.Imoteur=0,057x0,9=0,051Nm alors que Cth=0,02Nm
La différence vient des pertes par frottement.
Cf = Cmes-Cth=0,051-0,02=0,031Nm
Q15 : Dans la pratique et pour des raisons technologiques liées à la protection du matériel, le
courant dans le moteur de l’axe de l’épaule ne doit pas excéder 2,7 A. Au-delà de cette valeur, le
frein se met en service pour immobiliser le bras. Dans ce cas, quelle est la masse maximale que la
pince peut soutenir ?
𝐶!"#,!"# = 𝐾! . 𝐼!"#$%& = 0,057×2,7 = 0,154𝑁𝑚 𝐶!"#,!"# = 𝑅! . 𝑅! . 𝑔(0,74. 𝑀 + 4(0,172 + 0,28) − 15,5.0,064) + 𝐶! 𝑀=
1 𝐶!"#,!"# − 𝐶!
− 4 0,172 + 0,28 + 15,5×0,064 = 4,55𝑘𝑔 0,74
𝑅! . 𝑅! . 𝑔
Q16 : Comparer la valeur de la masse déterminée précédemment avec celle préconisée par le
constructeur (1,5 kg) et conclure.
On trouve une valeur très différente de celle préconisée par le constructeur (1,5kg) car il faudrait
prendre en compte les effets dynamiques (inertie), les frottement et résistances au roulement dans
les liaisons.
Sciences industrielles pour l’ingénieur
2
ème
Année
4 sur 4
© Copyright 2026 Paperzz