CHAPITRE
1
FEUILLE N°1 - LIAISONS ET MÉCANISMES
Colle 1- Liaisons équivalentes
Corrigé page ??
Q1. Pour chacun des assemblages ci-dessous :
Q1a. Identifier les surfaces de contact
Q1b. Préciser chaque liaison élémentaire (désignation complète, torseur cinématique, torseur
des actions transmissibles)
Q1c. Déterminer la liaison équivalente pour trois des assemblages.
Q1d. Préciser le degré d’hyperstaticité de la liaison.
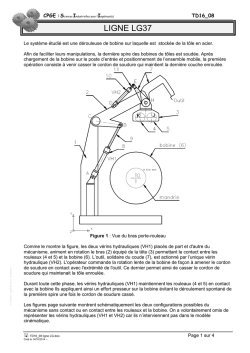
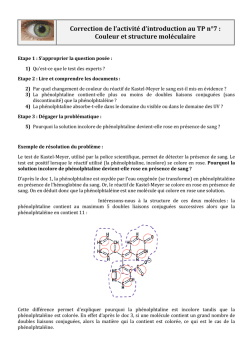
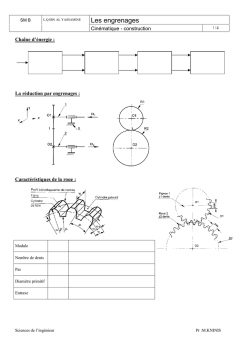
Exercice 2- Tête à polir le marbre
Corrigé page ??
extrait TSI Centrale Supélec 2001
Description et données
Les patins abrasifs sont :
– entraînés en rotation autour d’un axe vertical ;
– animés d’un mouvement d’oscillation autour d’un axe
horizontal.
1
Figure 1.1: Tête à polir
2
1 Feuille n°1 - Liaisons et mécanismes
Les patins utilisés sont également des patins standards, parallélépipédiques, dont la face inférieure devient progressivement cylindrique, sous l’effet de l’usure.
Les grains d’abrasif usés ne restent pas sous les patins et
sont facilement éliminés par aspersion d’eau sur la pierre à
polir.
– (x#»i , y#»i , z#»i ) est une base liée à la pièce i ;
dθ
– ωij = dtij représente la mesure algébrique de la vitesse de
rotation du solide i par rapport au solide j, θij repérant l’orientation du solide i par rapport au
solide j ;
# »
– Vitesse d’entrée : Ω1/0 = ωe · #»
z , ωe = 500 tr/min.
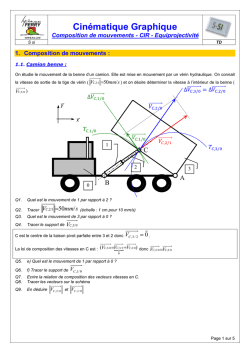
A. Étude du mécanisme de transformation de mouvement
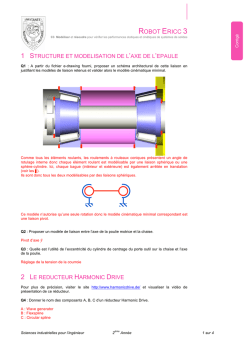
Le mécanisme est schématisé sur la figure de la présente page.
1
#»
z = z#»1
Carter 0
Zc
Za = 81, Zb = 80
Zc = Zd = 40
# »0
OO = e · y#»3 + h · z#»1
#»
AB = a · y#»5 − b · z#»5
# »
OB = c · y#»1
# »
BG = −d · z#»
Za
5
Zd
e = 10 mm
Zb
3
5
b = 55 mm
4
A
O0
B
O
Liaison encastrement entre 1 et 6
6
5
y#»1
×
G5
Figure 1.2: Schéma cinématique tête à polir
Le mécanisme étudié est constitué de la chaîne fermée de solides 1 – 3 – 4 – 5 – 6 – 1 . Ce sous
ensemble fait partie du système dont le schéma est présenté sur le document 2, en acceptant que la
liaison 1 – 6 soit une liaison encastrement.
Le mouvement de rotation de 3 par rapport à 1 provoque un mouvement d’oscillation de la pièce
5 par rapport à 1. Ce mouvement correspond à la mobilité utile du système étudié. Les figures de
rotation (figure 1.3) précisent les différents paramètres angulaires et les repères associés aux pièces.
Q1. Tracer le graphe des liaisons, en nommant les liaisons autres que la liaison 1–6 et en indiquant
leurs caractéristiques géométriques.
Q2. En supposant l’absence de toute mobilité interne, calculer le degré d’hyperstatisme du système,
sans écrire, pour l’instant, de fermeture de chaîne cinématique.
3
y#»1
#»
y
y#»3
y#»1
x#»5
x#»1
θe
#»
x
x#»1
x#»3
θ31
x#»1
z#»5
θ51
z#»1
Figure 1.3: Figures de calculs
Q3.
les
cinématiques
suivant
:
Exprimer
torseurs
V3/1 en O, V4/3 en O’, V5/4 en O’ et V6/5 en O.
Q4. En supposant toujours la liaison 1–6 comme une liaison encastrement, écrire les équations
scalaires traduisant la fermeture de la chaîne cinématique au point O’.
Q5. Retrouver le degré de mobilité et d’hyperstaticité.
Afin de rendre le mécanisme isostatique, il faut rajouter, dans les liaisons composant la chaîne
cinématique étudiée, un nombre de degrés de liberté au moins égal au degré d’hyperstatisme. On
peut rajouter un nombre de degrés de liberté supérieur au degré d’hyperstatisme à condition de ne
pas modifier la loi entrée – sortie du mécanisme. Apparaîtront alors une (ou plusieurs) mobilité(s)
interne(s). Une possibilité de modification concerne la liaison 3 – 4.
Q6. Proposer une modification de la liaison 3 – 4 permettant de rendre le mécanisme isostatique.
Écrire son torseur cinématique et montrer son incidence sur les équations de fermeture cinématique. Si cette modification entraîne l’apparition d’une (ou plusieurs) mobilité(s) interne(s), la (les)
citer.
Attention : le schéma cinématique est réalisé dans la position de référence du mécanisme pour
laquelle les liaisons pivot ou pivot glissant 1 – 3, 3 – 4, 4 – 5 et 5 – 6 sont coplanaires. On fera
l’hypothèse que les pièces 1 et 6 sont liées par une liaison encastrement.
Remarque 1 : le schéma ci-dessus permet d’étudier la cinématique du mécanisme. Il est donc
nécessaire d’y faire apparaître de façon rigoureuse les liaisons et leurs positions respectives, mais
les formes données aux pièces n’ont aucune importance.
Remarque 2 : on réalise du déport de denture afin que les entraxes des engrenages a – c et b – d
puissent être égaux bien que Za et Zb soient différents.
4
1 Feuille n°1 - Liaisons et mécanismes
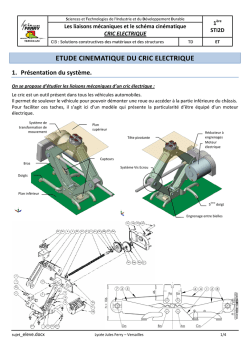
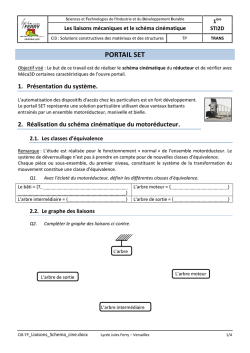
Exercice 3- Pied de Grue
Corrigé page ??
extrait de Centrale PSI 2013
A. Stabilité du portique sur ses appuis
Objectif Évaluer le risque de basculement lorsque le portique est soumis au vent et lors du levage
d’un conteneur.
La forme très élancée du portique présente des risques de basculement lors de la manipulation
des conteneurs les plus lourds et par grand vent. Il s’agit de lever ces risques.
Le centre de gravité du portique seul est
noté GP , le centre de gravité du chariot
Gch et le centre de gravité de l’ensemble
mobile {spreader et conteneur} G3 . Soient
lx = 17m,ly = 15m, H = 32m et h = 25m (
figure 1.4).
La grue doit pouvoir se déplacer normalement en translation dans une plage
de vents de 0 à 120 kilomètres par heure.
Elle ne doit jamais basculer (vitesse maximale du vent mesurée au cours des 100
dernières années : 300 km h−1 ).
La prise au vent latérale est très forte et
# »
sera modélisée par une force : Fvent = 21 ·
λ · V2 · #»
x appliquée en K (figure 6), avec
λ = 800 Ns2 m-2 .
La liaison galets-rail supporte les 1080
tonnes du portique. En raison des pressions admissibles aux contacts, plusieurs
galets sont nécessaires pour chaque pied.
Les questions suivantes visent à élaborer un modèle statique d’un pied pour
conclure sur le critère de non basculement
de la grue.
Q1. Déterminer le degré d’hyperstatisme
du modèle plan d’un seul pied, de la liaison portique/sol donné sur la figure 1.5(a).
En déduire la répartition de la charge entre
les 8 galets.
Q2. À partir de l’étude des mobilités du
pied décrit figure 4, proposer une liaison
équivalente à la liaison assurée par un pied
entre le portique et le rail, dans le plan
Figure 1.4: Vue longitudinale du portique
( #»
x , #»
z ) de la figure 1.5(a), en précisant ses
caractéristiques géométriques.
Q3. Déterminer littéralement, dans le cadre d’une modélisation dans le plan ( #»
x , #»
z ) de la figure 1.4,
les efforts normaux du sol sur la grue transmis par les pieds « gauche » et « droit », lorsque la grue
est soumise au vent. (Hypothèses : le mouvement suivant #»
z du conteneur ne sera pas considéré ; le
chariot et le portique sont immobiles ; la masse des poutres supérieure, inférieure et des supports
de galets est négligeable devant Mp .)
Q4. En déduire la valeur (enkm h−1 ) de la vitesse de vent V1 pour laquelle la grue bascule. En
5
déduire la valeur (en km h−1 ) de la vitesse de vent V2 pour laquelle la grue glisse, en considérant au
contact roue/rail un modèle de frottement sec de coefficient f = 0, 2.
(a) Architecture d’un pied de la grue (chaque point noir représente une liaison pivot)
(b) Photographie du pied de grue
6
1 Feuille n°1 - Liaisons et mécanismes
Exercice 4- Joint de Koenig
Corrigé page ??
Le joint de Koenig permet réaliser un accouplement entre deux arbres coplanaires faisant
un angle non nul. Il est constitué de deux manchons, un relié à l’arbre d’entrée, l’autre à l’arbre
de sortie et de 3 paires de biellettes articulées. Il
est principalement utilisé en robotique pour ces
grandes capacités angulaire −135° ≤ α ≤ 135°.
#»
Un couple moteur Cm = Cm ·x#»0 est appliqué sur
#»
l’arbre d’entrée, un couple résistant C = C · u#»
Paramétrage
– (x#»0 , y#»0 , z#»0 ) et (u#»0 , v#»0 , z#»0 ) deux bases associées
au bâti 0 avec (x#»0 , u#»0 ) = α et α , 0 ;
– (x#»0 , y#»1 , z#»1 ) une base associée à l’arbre d’entrée 1 avec (y#»0 , y#»1 ) = (z#»0 , z#»1 ) = θ1 ;
– (u#»0 , y#»2 , z#»2 ) une base associée à l’arbre de sortie 2 avec (v#»0 , y#»2 ) = (z#»0 , z#»2 ) = θ2 ;
# »
# »
– O1 A1 = R· y#»1 , O2 A2 = R · y#»2 ;
# »
# »
– OO1 = OO2 = a ;
# »
# »
r
r
0
– QA1 = c1 et QA2 = c2 .
sur l’arbre de sortie.
Dans un premier temps, nous ne considéreLe schéma cinématique présente la structure
rons qu’une seule paire de biellettes
du mécanisme (une seule paire de biellette est
Q1. Écrire la fermeture géométrique, le joint de
représentée).
Koenigs est-il homocinétique ? Il sera judicieux
d’utiliser comme
#» base
de projection, la base mé#»
#»
diane Bm = s , t , z0 défini par la figure 1.6(b).
Q2. Quelle est la trajectoire du point Q ?
Q3. Tracer le graphe des liaisons (une seule paire
de biellettes), identifier les liaisons. Évaluer le
degré d’hyperstaticité et de mobilité.
manchon de sortie
Q4. Vérifier à partir d’une étude statique le degré d’hyperstaticité et le degré de mobilité.
Q5. Que se passe-t-il si α = 0° ?
Nous allons maintenant considérer les 3 paires
de biellettes.
Q6. Évaluer sans calcul le degré de mobilité et le
biellettes
degré d’hyperstaticité.
manchon d’entrée
Q7. Pouvez-vous identifier l’origine de l’hyperstaticité ? Que proposez-vous pour rendre le sysFigure 1.5: Joint de Koenig
tème isostatique ?
y#»1
3-Biellette E z#»
0
y#»0
A1
O1
0-Bâti
z#»0
Q
O
y#»2
x#»0
z#»0
#»
t
#»
s
4-Biellette S
v#»0
A2
x#»0
y#»0
O2
β
u#»0
u#»0
v#»0
#»
t
u#»0
1-Manchon E
2-Manchon S
(a) Joint de Koenig - schéma cinématique
x#»0
β
(b) Figures de calcul
#»
s
7
Exercice 5- Scooter Piaggio
Corrigé page ??
d’après Banque PT SIB
Le train avant est défini comme l’ensemble comprenant : la roue (ou les roues) avant, la suspension, le dispositif de freinage, tous les éléments participant aux liaisons entre ces éléments. Sur un
scooter à une seule roue avant, le train avant est lié au châssis du véhicule par une liaison pivot
permettant d’orienter la roue avant par rapport au véhicule par l’intermédiaire du guidon. Cette
liaison permet de diriger le véhicule. Pour un scooter à deux roues avant, le train avant doit non
seulement permettre le pivotement des roues commandé par le guidon mais il doit également permettre l’inclinaison de l’ensemble du scooter tout en conservant le contact des roues au sol.
# » # » # »
O1 O2 = G1 G2 = D1 D2 = l1
# » # » # » # »
G1 O1 = G2 O2 = O1 D1 = O1 D2 = l2
G2
O2
3
0
G1
D2
2
O1
1
4
D1
6
5
roue 7
(c) scooter
roue 8
(d) Parallélogramme de la direction
A. Parallélogramme d’inclinaison
La solution retenue pour permettre une inclinaison du véhicule malgré la présence de deux roues
sur le train avant repose sur la cinématique imposée par un dispositif en parallélogramme (figure 1.6(d)). Le mécanisme est constitué d’un châssis (0), de deux bras (1) et (2) et de deux colonnes
(3) et (4). Les liaisons entre ces différents solides sont des liaisons pivots.
Q1. Tracer le graphe des liaisons limité à l’ensemble Σ = {0, 1, 2, 3, 4}, préciser le nombre cyclomatique.
Q2. Écrire la fermeture cinématique limitée à la boucle {0,1,2,3}. En déduire le degré de mobilité de
l’ensemble Σ.
Q3. Déterminer le nombre d’inconnues de liaisons de l’ensemble Σ, en déduire le degré d’hyperstaticité. Justifier ce degré.
8
1 Feuille n°1 - Liaisons et mécanismes
B. Blocage de la suspension
On s’intéresse dans cette partie au dispositif de verrouillage de l’inclinaison. Ce dispositif, présent
en option, répond à un souci d’amélioration du confort d’utilisation du scooter en milieu urbain( vitesses inférieures à 15 km h−1 ). Le train avant est sensiblement alourdi, par sa structure particulière,
par rapport à un véhicule classique. D’autre part, les protections et les éléments de confort propres
au marché du scooter amènent le poids des scooters, même de faible cylindrée, à atteindre celui
d’une moto de grosse cylindrée. Il permet en outre d’éviter de poser le pied aux arrêts (nombreux
en circulation urbaine), et de garer le scooter dans n’importe quelle configuration (pente, à cheval
sur un trottoir ou une bordure, etc . . .) sans avoir à utiliser la béquille centrale (opération difficile
sur un engin d’environ 200 kg).
Le verrouillage de l’inclinaison du train avant nécessite la suppression de ces mobilités :
– la mobilité du parallélogramme d’inclinaison,
– la mobilité de la suspension avant (particulièrement utile en mode parking).
»
z#13
Verrou de
blocage
libre
»
z#13
colonne
3 ou 4
N
Bras de suspension, le
ressort n’est
pas représenté
colonne
3 ou 4
N
13
13
10
10
14
M
z#»0
M
12
O
P
z#»0
12
O
11
P
11
y#»0
(e) Suspension pour une roue du train avant
y#»0
(f) Schéma équivalent en position verrouillée
Figure 1.6: Bras de suspension : position non verrouillée et verrouillée
Les deux figures 1.6(e) et 1.6(f) présentent le bras de suspension avant dans sa position libre et le
modèle équivalent lorsqu’elle est en position vérouillée
Q4. Tracer le graphe des liaisons dans les deux cas limité aux solides {10, 11, 12, 13, 14 }, préciser
le nombre cyclomatique,
On étudie dans un premier temps, la boucle constitué des solides {12, 13, 14 } dans le premier cas
puis le second
Q5. Écrire la fermeture cinématique, en déduire le degré de mobilité de chacune des boucles puis
le degré d’hyperstaticité.
Q6. Préciser la liaison équivalente.
Q7. Tracer le schéma cinématique minimal.
Q8. Évaluer le degré de mobilité du mécanisme complet puis en déduire le degré d’hyperstaticité.
© Copyright 2026 Paperzz

![[ 紛失・盗難届受理証明書 ] 作成依頼書](http://s3.paperzz.com/store/data/006223965_1-1fbd6ae9d8cae693f77896c556e136af-250x500.png)