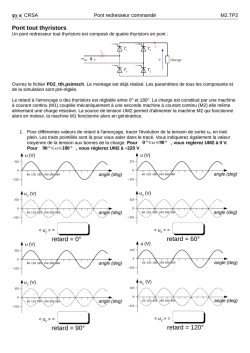
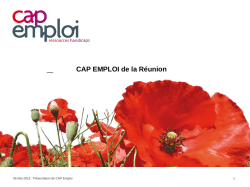
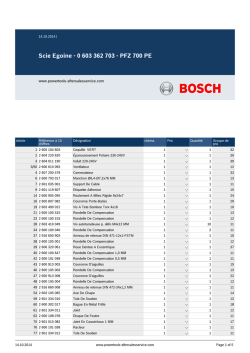
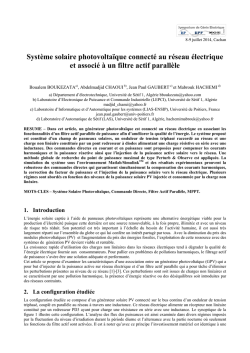
Fluctuations de tension et flicker Évaluation et atténuation (partie 2) par JACQUES COURAULT Directeur des développements en Électronique de Puissance – ALSTOM Power Conversion Guillaume de PREVILLE Chef de projet de développements en Électronique de Puissance – ALSTOM Power Conversion et Jean-Louis SANHET Responsable Normalisation et Réglementation – ALSTOM Power Conversion 1. 1.1 1.2 Critères d’atténuation des fluctuations de tension ....................... Évaluation du flicker. Four à arc courant alternatif ................................... Atténuation du flicker .................................................................................. 1.2.1 Méthode .............................................................................................. 1.2.2 Rapidité................................................................................................ 2. 2.1 2.2 2.3 2.4 Absorbeurs................................................................................................. Fonctionnement........................................................................................... Dimensionnement de l’actionneur............................................................. Dimensionnement du filtre ......................................................................... Technologie .................................................................................................. Pour en savoir plus........................................................................................... D 4 316 – 2 — 2 — 2 — 2 — 3 — — — — — 3 3 4 6 8 Doc. D 4 318 es fluctuations de tension d’un réseau peuvent avoir des origines diverses, tous les procédés industriels sont susceptibles d’en produire si la puissance de court-circuit au point de raccordement et d’évaluation est faible. Sans entrer dans les détails des perturbations pour chaque activité, on peut cependant classer ces perturbations en deux grandes catégories : les fluctuations lentes et les fluctuations rapides. Les fluctuations lentes ont pour origine les charges réactives lentement variables des réseaux. Leur atténuation est réalisée par des statocompensateurs de réseau. La bande passante des actionneurs utilisés ne dépasse pas quelques hertz. Par ailleurs, ces équipements ne sont généralement pas conçus pour éliminer une composante inverse ; ils ont donc un fonctionnement équilibré. Les fluctuations rapides de la tension, qui engendrent le flicker, ont principalement pour origine les activités métallurgiques, fours à arc, laminoirs, machines à souder. La compensation de la gêne engendrée par ces perturbations ne pourra se faire qu’avec des actionneurs capables d’une bande passante supérieure à 20 Hz. Pour être exhaustif, il est nécessaire d’évoquer les équipements de rééquilibrage des réseaux. On les rencontre surtout pour rééquilibrer les réseaux triphasés qui alimentent des installations monophasées de la traction ferroviaire. Dans les paragraphes qui suivent nous ne considérerons que les statocompensateurs rapides de flicker ; ils comprennent, dans leur puissance et dans leur contrôle, toutes les particularités des appareils lents de réseau et leur dimensionnement prend nécessairement en compte la nécessité de rééquilibrage. L Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite. © Techniques de l’Ingénieur, traité Génie électrique D 4 316 − 1 FLUCTUATIONS DE TENSION ET FLICKER ____________________________________________________________________________________________________ L’ensemble « Compensateurs statiques de puissance réactive » fait l’objet de quatre articles : D 4 315 Fluctuations de tension et flicker. Évaluation et atténuation (partie 1) D 4 316 Fluctuations de tension et flicker. Évaluation et atténuation (partie 2) D 4 317 Contrôle dynamique de puissance réactive. Dispositifs statiques Doc. D 4 318 Pour en savoir plus Les sujets ne sont pas indépendants les uns des autres. Le lecteur devra assez souvent se reporter aux autres fascicules. 1. Critères d’atténuation des fluctuations de tension Puissance active P Fonctionnement assigné SN 1.1 Évaluation du flicker. Four à arc courant alternatif Plusieurs formules sont couramment utilisées ; il est bien évident qu’elles prennent toutes en compte la puissance de court-circuit du four SSC f et du réseau SSC r au point de couplage commun. Ces formules ont une double origine, théorique et pratique ; elles contiennent des coefficients empiriques dont la plage de variation est fonction de l’expérience des utilisateurs (cf. D 4 315 § 1.1.2 et § 2.3.1). Les premières évaluations significatives, du fait de leur nombre, de la gêne engendrée par le flicker ont été réalisées au Japon avec un critère parfois encore utilisé (∆V10). On a pu établir une relation avec les variations de tension du réseau, et faire un lien direct avec Pst [relations (1) et (2)] : ∆V max ∆V 10 = ---------------3, 6 θSC Figure 1 – Évaluation de la plage de puissance réactive d’un four à arc 1 P + jQ ∆V10 est exprimé en % ; d’où l’évaluation suivante de Pst max : Puissance réactive Q ∆Qmax 1 ∆Q max P st max = 3 ∆V 10 = 0, 83 ∆V max = 83 k ⋅ -----------------S SC ∆Q max ⋅ δ 100 P st max = 3 ------------------------------------3, 6 S SC r Court-circuit θN 1 P jQ P 2 2 2 3 3 3 jQ – jQ (1) dans laquelle δ est un coefficient d’expérience compris entre 1 et 1,3. Pour Pst 99 % pour la prédétermination du flicker engendré par un four à arc au point commun de couplage PCC, on trouve : S SC f P st 99 % = K st ------------S SC r (2) où Kst est un coefficient caractéristique d’émission pour le calcul de Pst compris entre 50 et 85. Si l’on assimile la variation de puissance réactive maximale à la puissance de court-circuit du four, il est évident que les deux formules sont sensiblement identiques. On a (cf. figure 1) : SN 2 2 ∆Q max = ---------------- ( sin θSC – sin θN ) sin θ N 1 1 P = U . I . 3 = U 2 . Y0 Y0 P 2 2 3 3 jY 1 jY2 IL = U .Y 0 3 I1 = U12 Y0 + U13 j .Y1 (3) La figure 1 met en évidence la méthode de détermination de la variation de puissance réactive maximale engendrée par un four à arc triphasé dans un fonctionnement équilibré. Mais, sur un four à arc, les fonctionnements déséquilibrés sont fréquents et il importe d’en tenir compte dans le dimensionnement électrotechnique des composants en partant du principe de Steinmetz qui sera évoqué largement dans le fascicule [D 4 317] pour définir la structure de contrôle de la boucle rapide. Les quelques considérations de la figure 2 permettent d’évaluer l’importance, du point de vue dimensionnement, des conséquences d’un fonctionnement monophasé. D 4 316 − 2 La partie réactive de la charge est facile à compenser. On ajoute – j . Q entre 1 et 2, il ne reste alors que la puissance active P à répartir sur les trois phases... avec U tension entre phases IL courant dans la ligne Y admittances entre les phases (comme indiqué) 1 P + jQ Q 2 3 P 3 P 3 Après quelques calculs on arrive au résultat suivant : Y Y1 = – 0 3 Figure 2 – Compensation de déséquilibre Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite. © Techniques de l’Ingénieur, traité Génie électrique et Y2 = Y0 3 ___________________________________________________________________________________________________ FLUCTUATIONS DE TENSION ET FLICKER 1.2 Atténuation du flicker k est représentatif du dimensionnement électrotechnique de compensation : 1.2.1 Méthode Nous avons jusqu’ici considéré des aspects stationnaires, mais les aspects dynamiques sont tout aussi importants. En fait, la difficulté essentielle quand on cherche à atténuer le flicker est liée à la rapidité de réaction de l’actionneur, encore appelé absorbeur. Q k = ------cQp (8) Q K f = ------rQp (9) Dans la suite, nous notons : L’actionneur doit être capable de réagir suffisamment vite pour éliminer toute variation de puissance réactive dans une bande de fréquence allant jusqu’à 25 Hz pour prendre en compte l’ensemble des critères d’évaluation du flicker. La figure 3 donne un exemple de schéma de principe de la structure d’un système de compensation. La figure 4 met en évidence, pour deux fluctuations rapides, l’une à 10 Hz (figure 4a), l’autre à 15 Hz (figure 4b), le fait qu’un fort dimensionnement électrotechnique du compensateur d’énergie réactive (CER) n’est pas toujours une nécessité. La figure 4c, qui prend en compte un retard pur de τ = 6,6 ms montre bien que, pour les fréquences supérieures à 16 Hz, un dimensionnement électrotechnique réduit (k = 0,6) donne une meilleure atténuation, Kf plus faible, que pour k = 1… Pour évaluer la rapidité de réponse minimale nécessaire, on peut considérer en première approche, un mode de réglage qui serait exact en amplitude, mais aurait un retard pur τ. Ce retard pur est une caractéristique fondamentale de l’actionneur qui introduit la compensation variable : avec des thyristors, il est classiquement de 6,6 ms pour un réseau de fréquence 50 Hz. La perturbation du réseau, fluctuation réactive, peut être représentée par un vecteur Q p . La correction apportée par l’absorbeur 1.2.2 Rapidité est également représentable par un vecteur Q c , le retard entre la perturbation et la correction introduit un déphasage ; la perturbation résultante est : La rapidité est la caractéristique fondamentale d’un compensateur d’énergie réactive, la figure 4d montre encore qu’un manque de rapidité peut augmenter les perturbations sur un réseau Kf > 1, c’est-à-dire une perturbation résultante supérieure à la perturbation d’origine. Qr = Qc – Qp (4) Nous avons jusqu’ici évoqué un retard pur, qui, pour les faibles valeurs, est en fait celui de l’actionneur ; il est indispensable, pour avoir une vision globale sur les aspects temporels, de prendre en compte ce qui est en amont de la commande directe de l’actionneur, c’est-à-dire la partie régulation qui est étroitement liée à l’observation des grandeurs physiques et à leurs traitements qui sont en adéquation avec la structure réseau-charge et filtrage. Ainsi la rapidité de compensation constitue un aspect fondamental pour la réduction des perturbations engendrées par les fluctuations d’énergie réactive. soit, sous une autre forme : qp = Qp sin ωt (5) qc = Qc sinω ⋅ (t – τ) = Qc sin (ω ⋅ t – α) (6) Le module de la perturbation résiduelle Qr peut alors s’écrire : Q r = Q p 1 – 2k cos α + k 2 (7) SSC U Réseau ∆U = ∆Q U SSC Constante = Compensation variable Compensation fixe Charge variable Inductance variable électroniquement Batterie de condensateurs accordés en filtres Four à arc ou laminoir Qind + Qcond + Qind absorbe la puissance réactive en excès (fourni par les condensateurs) quand la charge en consomme moins Qcond compense Qmax de la charge Qcharge et Qind sont de même nature, mais les variations sont des signes opposés Qcharge Figure 3 – Structure d’un système compensé Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite. © Techniques de l’Ingénieur, traité Génie électrique D 4 316 − 3 FLUCTUATIONS DE TENSION ET FLICKER ____________________________________________________________________________________________________ 1 10 ms 1 0,8 0,8 Kf Kf 10 ms 0,6 6,6 ms 0,6 5 ms 4 ms 6,6 ms 0,4 0,4 5 ms 4 ms 0,2 0,2 0 0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 2 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 k a 2 k fréquence fo = 10 Hz b fréquence fo = 15 Hz Compensation égale à la perturbation ; k = 1 : P 1,4 C R ω τ 1,2 1 Kf 0,8 0,6 La compensation est plus faible que la perturbation ; k = 0,6 : k = 0,6 0,4 k=1 0,2 0 ωτ 0 Kf = c 5 10 15 20 Qr R 25 30 f (Hz) k= Qp P C C compensation R résidu non compensé P perturbation Qc Qp K f (f ) pour un retard pur = 6,6 ms d schémas de compensation Figure 4 – Effets de la rapidité de la compensation 2. Absorbeurs 2.1 Fonctionnement L’absorbeur est la partie active du statocompensateur. Les charges qui engendrent les perturbations sur les réseaux sont généralement à déphasage arrière, c’est-à-dire inductive ; pour les compenser, on a recours à des condensateurs qui constituent la partie fixe de la compensation. Il est hélas bien difficile de moduler, avec la rapidité souhaitable, le courant dans un condensateur ; ainsi, comme le montre le schéma de principe de la figure 3, on installe sur le réseau une batterie de condensateurs dimensionnée pour l’énergie réactive maximale consommée. Pour moduler la puissance réactive de compensation, on absorbe le surplus de l’énergie de compensation avec un dispositif inductif. Ce dispositif est constitué de thyristors et d’inductances dans lesquelles ont fait circuler un courant discontinu. La figure 5 montre la conduction effectivement discontinue du courant dans les inductances, en allant d’une conduction faible vers la conduction totale des thyristors. Mais la puissance réactive de compensation ne peut s’exprimer qu’en prenant en compte les valeurs efficaces de la tension (U) et plus particulièrement, du courant (I). D 4 316 − 4 Sur la figure 6a, la forme temporelle du courant dans les inductances L de bras permet de définir l’angle β de commande des thyristors. La figure 6b donne l’évolution de la valeur efficace du courant fondamental I1 en fonction de β ; pour dépersonnaliser cette courbe, c’est-à-dire la rendre indépendante de tout cas particulier, nous en avons fait le tracé en grandeur réduite… Les courants évoqués génèrent des harmoniques qu’il importe de définir dans le but de dimensionner les filtres qui introduisent la puissance réactive capacitive (figure 7). En régime équilibré, avec trois courants de bras identiques (même β), l’harmonique 3 contenu dans les bras disparaît dans les phases. Cette propriété importante peut être prise en compte pour le dimensionnement des filtres des statocompensateurs de réseau qui, par définition, n’ont jamais pour fonction d’éliminer une composante inverse. Par contre, les statocompensateurs de flicker peuvent fonctionner transitoirement en régime déséquilibré et de ce fait générer de l’harmonique 3 dont il convient de tenir compte. 2.2 Dimensionnement de l’actionneur Le fait de connaître la puissance réactive à installer et d’avoir retenu un niveau de tension, c’est-à-dire d’avoir défini un courant, n’est pas suffisant pour déterminer les inductances L /2 ; il est nécessaire de définir la valeur maximale de l’angle β de commande des thyristors. Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite. © Techniques de l’Ingénieur, traité Génie électrique ___________________________________________________________________________________________________ FLUCTUATIONS DE TENSION ET FLICKER Lωi 0,8 U 0,6 Courant dans une inductance ou un bras 0,4 iL 0,2 0 – 0,2 L1 /2 Th11 Th12 β – 0,4 L1 /2 – 0,6 Courant dans le bras 1 Tension entre phases – 0,8 – 100 – 50 0 50 100 150 200 250 β = 60° Courant dans le bras 1 a 300 ωt (°) courant instantané dans un bras 1 Courant thyristor Th11 LωI1 0,9 U 0,8 0,7 uAK Th11 0,6 0,5 0,4 Courant thyristor Th12 0,3 0,2 0,1 uAK Th12 0 0 10 20 30 40 50 60 70 80 90 β (°) b courant efficace fondamental dans un bras Courant de ligne iL L ω I1 U uAK tension anode-cathode des thyristors 2β – sin 2β π I1 courant de phase fondamental uL et iL tension et courant de ligne U tension efficace Figure 5 – Principe de fonctionnement de l’absorbeur Figure 6 – Évolution de la valeur efficace du courant fondamental dans les inductances La figure 7 indique clairement, pour une tension et un courant donné, qu’un angle β faible conduit à une inductance faible, ce qui économiquement ne manque pas d’intérêt… Mais la figure 7 montre sans ambiguïté que cela augmente de manière significative la valeur des harmoniques et en particulier de l’harmonique 3 ; ainsi, le gain significatif, envisagé sur les inductances de bras, peut être annulé par le surcoût du filtre. Le choix de β est donc fondamental pour effectuer un compromis de dimensionnement éclairé. Les facteurs d’optimisation qui doivent être pris en compte sont bien entendu d’ordre économique : le coût de revient et le coût d’exploitation. Dans ce dernier coût, il entre essentiellement ceux liés à la minimisation des pertes de l’installation. ■ Trois formules sont à prendre en compte pour optimiser un absorbeur : — la valeur efficace du fondamental I1 déjà évoquée sur la figure 6b : U 2 β – sin 2 β I 1 = ----------- ----------------------------L⋅ω π = (10) — la valeur efficace totale I du courant : U 2 β cos 2 β – 3 sin 2 β + 4 β I T = ----------- ----------------------------------------------------------------L⋅ω π (11) — la valeur crête du courant : U I crête = ----------- 2 ( 1 – cos β ) L⋅ω (12) Sur la figure 8a, trois tracés, pour trois valeurs différentes de β, ont été représentés avec des valeurs différentes des inductances dans le but de maintenir constante la valeur efficace I1 du courant fondamental. Ainsi, ces couples de valeurs, β1, L1, β2, L2, β3, L3 sont à priori possibles. La figure 8b représente l’évolution du rapport des valeurs efficaces du courant total au courant fondamental en fonction de β ; il est clair qu’un angle faible conduit à un surdimensionnement en courant : β = 40° entraîne un surdimensionnement en courant de l’ordre de 1,22, β = 60° conduit à 1,07… Cette dernière valeur doit être Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite. © Techniques de l’Ingénieur, traité Génie électrique D 4 316 − 5 FLUCTUATIONS DE TENSION ET FLICKER ____________________________________________________________________________________________________ i (A) 3 000 1 I1 / I1 max Ih 0,9 I1 0,8 2 000 0,7 1 000 0,6 0 I11 / I1 0,5 β = 60° β = 80° – 1 000 I9 / I 1 0,4 β = 40° – 2 000 I5 / I 1 0,3 I3 / I1 – 3 000 0,6 0,8 1 1,2 1,4 1,6 1,8 I7 / I1 0,1 2 2,2 t (en 10 – 2 s) 0,2 a courant instantané dans une inductance d'un bras I I1 1,8 0 0 10 20 30 40 50 60 70 80 90 β (°) a fondamental et harmoniques du courant dans un bras 1,7 1,6 1,5 1 1,4 IL1 / IL1 max ILh 0,9 1,3 IL1 0,8 1,2 1,1 0,7 1 IL11 / IL1 0,6 0,5 b IL7 / IL1 0,4 50 60 70 évolution de I I1 80 90 β (°) Figure 8 – Analyse du courant dans un bras 0,3 IL13 / IL1 0,2 0,1 0 0 10 20 30 40 50 60 70 80 90 β (°) b b 40 30 IL5 / IL1 ils sont protégés par des circuits d’aide à la commutation (R-C), dont les condensateurs ont pour valeur 4 µF (un circuit R-C pour deux thyristors tête-bêche). Les pertes sont calculées en partant des formules suivantes : — pertes dans un thyristor : fondamental et harmoniques du courant dans une phase (en fonctionnement équilibré) ILh courant de phase harmonique de rang h 2 pth = V0 ⋅ Ith moy + rth I th — courant moyen dans un thyristor : IL1 courant de phase fondamental IL courant de phase I1 courant fondamental 2 U I th moy = ----------- ------- ( sin β – β cos β ) L⋅ω π (14) — courant efficace dans un thyristor : Figure 7 – Harmoniques contenus dans les courants de bras et de phase considérée comme limite du point de vue de l’absorbeur ; elle permet néanmoins, pour les inductances, un gain voisin de 2 par rapport à des angles voisins de 90°. Une valeur maximale de β égale à 60° semble donc être, du point de vue de l’actionneur, satisfaisante pour réaliser un bon compromis technico-économique. ■ Ce choix peut-être renforcé si l’on considère les pertes globales de l’absorbeur. Pour expliquer ce point de vue, considérons un absorbeur de 37 Mvar sous une tension entre phases de 10 kV, avec 10 thyristors en série. Les thyristors ont les caractéristiques suivantes : V0 = 1,12 V et D 4 316 − 6 (13) rth = 0,416 mΩ ; 2 β cos 2 β – 3 sin 2 β – 4 β ---------------------------------------------------------------2π U I th = ----------L⋅ω (15) — pertes dans une résistance d’un circuit « R-C » pour 2 thyristors : pc = 1 ∑ --2- C ⋅ V 2 2 1 ⋅ f = 4 --- [ C ⋅ U 2 sin β ] ⋅ f 2 (16) f étant la fréquence fondamentale du réseau d’alimentation. La figure 9 montre que les pertes dans les thyristors sont sensiblement constantes quand β évolue avec I1 constant. On peut toutefois observer une tendance vers un minimum entre 60° et 70°. On doit noter qu’il ne s’agit que d’une tendance car un calcul plus rigoureux introduisant les pertes de commutation pourrait éliminer ce minimum. Il est alors préférable de considérer, du moins en première approche, les pertes dans les thyristors constantes. Globalement, Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite. © Techniques de l’Ingénieur, traité Génie électrique ___________________________________________________________________________________________________ FLUCTUATIONS DE TENSION ET FLICKER 2.3 Dimensionnement du filtre Pertes (W) 1 000 990 980 970 960 950 940 930 920 910 900 La stabilité des réseaux alternatifs n’est jamais un problème très simple. La relative complexité du problème est croissante quand le rapport entre la puissance de court circuit, éventuellement évolutive, et la puissance des charges alimentées est faible. Q = 37,34 Mvar - I1 = 1244 A 45 a 50 55 60 65 70 75 80 85 Les charges alimentées qui nécessitent des statocompensateurs sont par définition variables et parfois rapidement variables (fours à arc, laminoirs…). Ces charges entraînent des variations de puissance réactive et génèrent des harmoniques. Les condensateurs des statocompensateurs sont donc agencés en filtre, pour éliminer les harmoniques générées, d’une part, par les charges et, d’autre part, par l’absorbeur. Il est donc logique, dans la grand majorité des cas, de rencontrer des filtres accordés sur les harmoniques 3, 5 et 7. 90 β (°) pertes dans un thyristor La figure 11a pose les bases du filtrage d’un réseau : le réseau ou encore la source est modélisée par son impédance interne Lr. La figure 11b représente l’impédance, vue du pollueur, en fonction de la fréquence réduite f /fr. Pertes totales 110 semi-conducteurs 100 + R .C (kW) Pertes totales 90 80 70 Pertes dans les semi-conducteurs 60 L’impédance Zxx kV est définie à un niveau de tension donné, ici xx kV (il s’agit alors du niveau de tension de référence auquel tous les autres circuits sont ramenés – au moyen du carré des rapports de transformation si transformateur il y a). Les échelles des figures 11b, 12b et 13b sont exprimées en valeurs réduites : — ordonnées par rapport à l’impédance de référence du 2 50 b 45 50 55 60 65 70 pertes globales de l'absorbeur 75 80 85 90 β (°) Figure 9 – Évaluation des pertes d’un absorbeur en fonction de les pertes de l’absorbeur (figure 9b) augmentent quand β augmente, du fait des pertes dans les résistances des circuits d’aide à la commutation. β = 60° est certainement un choix optimal pour les statocompensateurs de réseau, minimisation des inductances et des pertes. Pour les équipements très dynamiques susceptibles de fonctionner en régime déséquilibré, donc susceptibles de générer de l’harmonique 3, une optimisation globale prenant en compte le dimensionnement des filtres doit être réalisée… Le dimensionnement doit prendre en compte le cas de défaut évoqué par la figure 10 (p. 8), il analyse le comportement des courants dans les inductances, donc dans les semi-conducteurs, lors de la disparition d’une phase au primaire du transformateur d’alimentation de l’absorbeur. En absence de blocage de la commande des thyristors (figure 10a p. 8), les courants développés sont très importants et pénalisants pour le dimensionnement qui doit les prendre en compte pendant 150 à 200 ms, temps d’ouverture du disjoncteur primaire (tenue en i 2t des thyristors) : l’absorbeur est alors dimensionné presque exclusivement pour tenir ce type de défaut. Si le contrôle est conçu avec une détection rapide de manque réseau, le blocage des impulsions (figure 10b) permet une meilleure optimisation d’ensemble, thyristors, inductances et disjoncteur. Du point de vue de l’angle β, il doit être noté que les valeurs faibles conduisent à un rapport entre le courant crête de faute et le courant crête nominal, élevé. Vis-à-vis des protections, si la détection de manque réseau n’a pas les performances souhaitées, il est bien évident que le choix β = 60° est plus pénalisant que β = 80°… Z sc UN niveau xx kV ( z = ------- pour f /fr = 1) : Z N = ------ZN SN — abscisses par rapport à la fréquence fondamentale du réseau d’alimentation (en utilisant la notation conventionnelle « h » pour le rang harmonique, les abscisses sont donc h = f /fr). Dans cet exemple simple, nous n’avons disposé qu’un seul filtre, sur le rang 5. La notion de fréquence de résonance est simple, elle fait partie du choix de filtrage mais il faut bien prendre conscience qu’une anti-résonance ou résonance parallèle est introduite par le condensateur Cf5 et l’inductance équivalente du réseau Lr. Dans cet exemple, il apparaît clairement qu’un harmonique à la fréquence de la résonance parallèle peut avoir des effets désastreux sur l’installation en créant des surtensions, d’où la nécessité d’introduire un amortissement. La figure 12 montre le principe, schéma et résultat, d’un amortissement. En fait, il s’agit d’un « mauvais filtre » accordé sensiblement sur le rang 3 de manière à compenser l’anti-résonance du rang 5. La figure 13 représente la structure classique d’un filtre de statocompensateur destiné à stabiliser le réseau d’alimentation d’un four à arc. Il faut noter qu’un accord sur le rang 3 est une obligation du fait du fonctionnement déséquilibré de l’absorbeur. 2.4 Technologie Ces équipements sont généralement destinés à des niveaux de puissance importants, de 10 à 150 Mvar, voire plus. Le marché des compensateurs d’énergie réactive n’est pas suffisamment important aujourd’hui pour que des technologies spécifiques aient été développées, des technologies génériques ayant pour origine la variation de vitesse ou le transport en courant continu ont été adaptées. Les semiconducteurs utilisés sont des thyristors ; ils sont associés en série ou en parallèle pour monter en puissance. Pour les puissances intermédiaires, c’est la standardisation interne des différents constructeurs qui leur fait choisir la solution la mieux adaptée en considérant les aspects technico-économiques. Pour les puissances supérieures à 10 Mvar, ce sont généralement les associations de type série qui sont retenues pour deux raisons : d’une part, la mise en série des thyristors est simple et bien maîtrisée et, d’autre part, elles permettent de minimiser les champs magnétiques environnant les différents composants, semi-conducteurs, inductances et structures métalliques. Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite. © Techniques de l’Ingénieur, traité Génie électrique D 4 316 − 7 FLUCTUATIONS DE TENSION ET FLICKER ____________________________________________________________________________________________________ 1,5 4 000 1 2 000 0,5 0 Courants au secondaire – 2 000 (A) Tensions au secondaire (en 104 V) 0 – 4 000 – 0,5 – 6 000 –1 – 8 000 – 1,5 0,055 0,06 0,065 0,07 0,075 0,08 0,085 0,09 0,095 0,1 t (s) 6 000 1 5 000 0,8 4 000 0,6 0,4 3 000 Courants 2 000 dans les inductances 1 000 (A) 0 Tensions au 0,2 primaire 0 (en 105 V) – 0,2 – 1 000 – 0,6 – 0,4 – 2 000 – 3 000 – 0,8 0,055 0,06 0,065 0,07 0,075 0,08 0,085 0,09 0,095 0,1 t (s) synchronisation en aval de la coupure d'une phase, sans blocage des impulsions 3 000 2,5 2 1,5 1 Tensions au 0,5 secondaire 0 (en 104 V) – 0,5 –1 – 1,5 –2 – 2,5 2 000 1 000 0 – 1 000 – 2 000 – 3 000 –1 0,055 0,06 0,065 0,07 0,075 0,08 0,085 0,09 0,095 0,1 t (s) a Courants au secondaire (A) 0,055 0,06 0,065 0,07 0,075 0,08 0,085 0,09 0,095 0,1 t (s) 0,055 0,06 0,065 0,07 0,075 0,08 0,085 0,09 0,095 0,1 t (s) 0,055 0,06 0,065 0,07 0,075 0,08 0,085 0,09 0,095 0,1 t (s) 3 000 2 1,5 2 000 1 Courants dans les inductances (A) 1 000 Tensions au primaire (en 105 V) 0 – 1 000 0,5 0 – 0,5 –1 – 2 000 – 3 000 – 1,5 0,055 0,06 0,065 0,07 0,075 0,08 0,085 0,09 0,095 0,1 t (s) b –2 0,055 0,06 0,065 0,07 0,075 0,08 0,085 0,09 0,095 0,1 t (s) synchronisation en aval de la coupure d'une phase, avec blocage des impulsions Figure 10 – Comportement des courants de bras lors de la disparition d’une phase du réseau D 4 316 − 8 Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite. © Techniques de l’Ingénieur, traité Génie électrique ___________________________________________________________________________________________________ FLUCTUATIONS DE TENSION ET FLICKER Source X = Lrω Ih Ih Vh rf5 a Lr Vh schéma de principe a 25 rf5 Cfa Cf5 Lr schéma du filtre Imp Impédance du réseau sans filtre 3,5 Zxx kV 3 anti-résonnance sonnance Zxx kV 10 rfa 4 Qf = 10 Mvar 20 15 Lf5 Ra Cf5 Filtre Qf Pollution Lfa Lf5 Réseau xx kV Qf = 5 Mvar Imp Impédance harmonique 2,5 Qf = 5 Mvar Qa = 3 Mvar 2 1,5 Réseau sans filtre 1 5 0,5 0 2 4 6 8 10 12 0 f /f r b Lf5 , rf5 , Cf5 Vh et Ih 2 4 6 8 12 f /f r impédance harmonique du réseau b impédance harmonique du réseau inductance, résistance et condensateur du filtre accordé sur l'harmonique 5 Ra et rfa tension et courant harmonique Lfa et Cfa inductance et condensateur accordés (ici rang voisin de 3) résistances d'amortissement Figure 12 – Amortissement Figure 11 – Principe du filtrage Ih 4 Imp Impédance harmonique Lfa Lf3 Lf5 Ra Cfa2 Cfa1 Z11 kV 3,5 Vh 10 rf3 rf5 Cf3 Cf5 Lr 3 2,5 Z réseau 2 1,5 1 Lfa = 6,11 mH Q3 = 7 Mvar Cfa2 = 1,66 mF Cfa1 = 0,55 mF Ra =8Ω Q5 = 22 Mvar 0,5 0 1 2 3 4 5 6 f /f r a schéma b impédance du réseau Figure 13 – Filtre classique d’un statocompensateur de four à arc Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite. © Techniques de l’Ingénieur, traité Génie électrique D 4 316 − 9 Pour les absorbeurs de faible puissance, les thyristors sont refroi- FLUCTUATIONS DE TENSION ET FLICKER ____________________________________________________________________________________________________ En haute tension, d’une manière plus précise pour les tensions supérieures à 4 kV, l’amorçage des thyristors s’effectue par une commande optique. Sur le figure 14c les blocs BAOP sont des boîtiers d’amorçage optique ; ils reçoivent l’ordre d’amorçage et renvoient vers le contrôle l’état des thyristors. Les composants Requ, C, R sont classiquement associés aux thyristors, pour répartir les tensions quand la valve est bloquée et pour réduire les contraintes en dv /dt sur les semi-conducteurs. Le composant appelé ∆U est nonlinéaire ; il assure la protection contre les surtensions, par l’amorçage du composant qui est soumis à une tension trop importante : de l’ordre de 0,9 fois la tension maximale que peuvent supporter les thyristors (VDRM). La figure 15 représente une valve de 24 thyristors en série. La valve comporte donc 48 semi-conducteurs ; elle est destinée à un réseau de 30 kV. L’électronique de commande rapprochée des thyristors est en partie inférieure de la valve. À l’intérieur de la valve, les liaisons entre la commande rapprochée et les boîtiers d’amorçage (BAOP) sont des liaisons optiques. Les liaisons vers le contrôle global de l’absorbeur sont également totalement optiques. La structure, les cadres supérieur et inférieur servent de connexions d’abord vers les inductances saturables, puis vers les inductances de l’absorbeur. L’ensemble des thyristors et résistances des circuits d’aide à la commutation est refroidi avec de l’eau dé-ionisée. L /2 L /2 λ λ λ λ Absorbeur L /2 L /2 λ λ L /2 a L /2 dispositif de puissance à thyristors Figure 15 – Statocompensateur de 32 Mvar sous 30 kV λ λ b mise en série des valves à thyristors Fibre d'amorçage BAOP Fibre de retour C Requ R Fibre d'amorçage ∆U BAOP Fibre de retour c commande optique Figure 14 – Structure d’un compensateur statique D 4 316 − 10 Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite. © Techniques de l’Ingénieur, traité Génie électrique
© Copyright 2026 Paperzz