Paper
zz
Explore Categories
Log in
Create new account
No category
Devoir de Physique 2
Download
Report
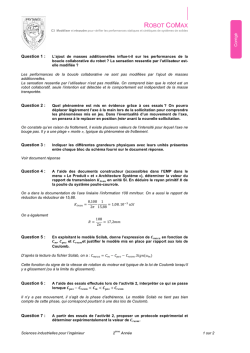
ROBOT COMAX
TD 30 - Un cours de physique en spéciale PC
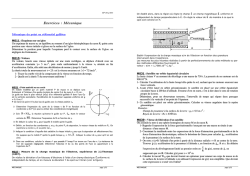
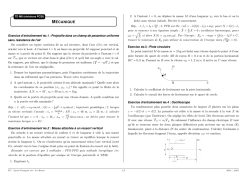
Exercices : Mécanique
classe 0
TD M0
TD-SP9 - s.o.s.Ryko
( ) ( ), z
semaine 08 - XPC Daudet
Nissan NV200 - poclain vehicules
Mon CV - Graphiste Charlène
© Copyright 2026 Paperzz
About Paperzz
DMCA / GDPR
Report