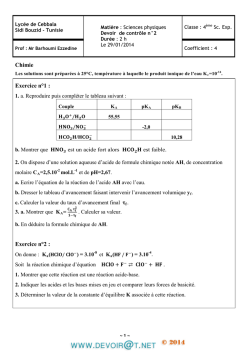
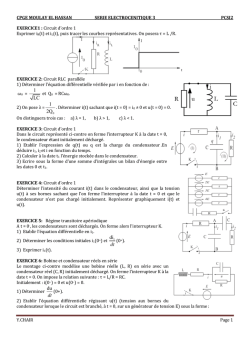
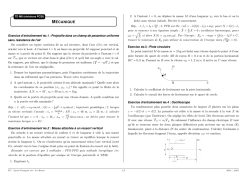
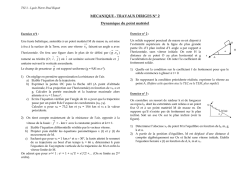
TD : Oscillateurs amortis / circuits du 2nd ordre esolution num´ erique SP9-Q1 R´ Extrait du programme : « À l’aide d’un outil de résolution numérique, mettre en évidence le rôle du facteur de qualité pour l’étude de la résonance en élongation ». ecr´ ement logarithmique et coefficient de frottement fluide SP9-E1 D´ Une masse m est attachée à un ressort de raideur k = 10 N.m−1 et de longueur à vide l0 = 10 cm fixé au point O. En plus de son poids et de la force élastique du ressort, la masse est soumise à une force de frottement → − → fluide F = −h− v. Un capteur fournit l’évolution de l’abscisse u(t) de la masse par rapport à sa position d’équilibre au cours du temps. 1) Établir l’équation d’évolution de l’abscisse z(t) de la masse. Quelle est la position d’équilibre ? En déduire une équation satisfaite par u(t) = z(t) − zéq . 2) Exprimer la pulsation propre ω0 et le facteur de qualité Q en fonction des données du problème. 2π et 3) Résoudre l’équation différentielle. Exprimer la pseudo-période T en fonction de T0 = ω0 de Q. u(t) 4) Montrer que le décrément logarithmique δ défini par δ = ln est indépendant du u(t + T ) temps et l’exprimer en fonction du facteur de qualité. 5) En utilisant les positions de la masse à chaque passage au maximum, comparer les données expérimentales à la modélisation précédente. 6) Commenter les résultats obtenus. 7) Estimer à l’aide des données expérimentales le facteur de qualité Q et la pseudo-pulsation ω. 8) En déduire la valeur m de la masse et le coefficient h de frottement fluide. SP9-E2 Portrait de phase d’un oscillateur harmonique amorti On considère le portrait de phase d’un oscillateur amorti composé d’une masse m = 500 g soumise à une force de rappel élastique (ressort de raideur k) → → et à une force de frottement fluide −λ− v (− v étant la vitesse de la masse m et x est l’écart à la position d’équilibre). – L’étude est réalisée dans le référentiel du laboratoire, supposé galiléen. 1) Déterminer la nature du régime de l’oscillateur. 2) Déterminer par lecture graphique : ◦ la valeur initiale de la position x0 ; ◦ la valeur finale de la position xf ; ◦ la pseudo-période Ta ; ◦ le décrément logarithmique. 3) En déduire le facteur de qualité Q de l’oscillateur, sa période propre ω0 , la raideur k du ressort et le cœfficient de frottement fluide λ. Applications numériques pour ces quatre grandeurs. Rép : 2) δ = ln Q= r x(t) : choisir la date t qui permet de déterminer à la fois x(t) et x(t + Ta ), δ ≃ 0, 628 ; 3) x(t + Ta ) π2 1 + ; k s’exprime en fonction de m et de ω0 ; λ s’exprime en fonction de m, ω0 et de Q. δ2 4 PTSI | Exercices – Oscillateurs amortis et circuits lin´eaires du second ordre 2014-2015 SP9-E3 Oscillateur amorti On considère un oscillateur harmonique amorti de pulsation propre ω0 = 100 rad.s−1 et de facteur de qualité Q = 10 ; la masse m = 100 g de cet oscillateur est lâchée avec un écart à la position d’équilibre de x0 = 10 cm sans vitesse initiale. 1) Calculer : a) la pseudo-période ; b) le décrément logarithmique ; c) l’amplitude des oscillations au bout de 2, 5 et 10 pseudo-périodes ; d) l’énergie mécanique initiale ; e) l’énergie mécanique au bout de 2, 5 et 10 pseudo-périodes. 2) Déterminer le nombre de pseudo-périodes au bout desquelles l’amplitude des oscillations est divisées par 17. Rép : 1.a) T ≃ 62, 9 ms ; 1.b) δ ≃ 0, 314 ; 1.c) x2 ≃ 5, 34 cm, x5 ≃ 2, 08 cm, x10 ≃ 0, 43 cm ; 1.d) Em (t = 0) = 5 J ; 1.e) Em (t = 2T ) ≃ 1, 42 J, Em (t = 5T ) ≃ 0, 22 J, Em (t = 10T ) ≃ 0, 01 J ; 2) n = 9. SP9-E4 Portrait de phase 1) Le portrait de phase ci-contre est celui de la tension uC aux bornes du condensateur de capacité C d’un circuit RLC série. De quel type de régime s’agit-il ? Représenter l’allure de uC (t) et la forme de e(t), la force électromotrice qui alimente le circuit. 2) Quel est l’ordre de grandeur du facteur de qualité Q du circuit ? Calculer précisément ce facteur de qualité sachant que le circuit est constitué de C = 33 nF , L = 560 mH et R = 3 kΩ. egime transitoire ap´ eriodique (*) SP9-E5 R´ À t = 0− , les condensateurs sont déchargés. On ferme alors l’interrupteur K. 1) Établir l’équation différentielle en i1 . di1 + 2) Déterminer les conditions initiales i1 (0+ ) et (0 ). dt 3) Exprimer i1 (t). Rép : 1) i1 vérifie l’équation canonique d’ordre 2 avec ω0 = 3) i1 (t) = E C A i1 R i i2 C R K B 1 E di1 + 2E 1 et Q = ; 2) i1 (0+ ) = et (0 ) = − ; 2 RC 3 R dt CR √ √ E 1 3t 5 5 t − √ .sh t exp − ch R 2RC 2RC 2RC 5 eels en s´ erie (*) SP9-E6 Bobine et condensateur r´ Le montage ci-contre modélise une bobine réelle (L, R) en série avec un condensateur réel (C, R) initialement déchargé. On ferme l’interrupteur K à la date t = 0 L On impose la relation suivante : τ = = RC. R − − Initialement : i(0 ) = 0 et u(0 ) = 0. C R L i u E R K du + (0 ) dt 2) Établir l’équation différentielle régissant u(t) — tension aux bornes du condensateur lorsque le circuit est branché, à t = 0, sur un générateur de tension E — sous la forme : 1) Déterminer 2 E d2 u 2 du + + 2u = 2 dt2 τ dt τ τ 3) Déterminer u(t) pour t ≥ 0. 4) Déterminer i(t), intensité circulant dans la bobine. Représentation graphique de i(t). 2 http://atelierprepa.over-blog.com/ [email protected] Exercices – Oscillateurs amortis et circuits lin´eaires du second ordre | PTSI 2014-2015 5) Peut-on prévoir le régime permanent sans calcul ? Si oui, déterminer U , tension aux bornes du condensateur, et I, courant dans la bobine, en régime permanent. 6) Déterminer le facteur de qualité Q de ce circuit. vérifier que sa valeur est en accord avec la nature du régime transitoire. du . Conclure ; 3) u(t) = dt E E t t t t E t t − cos + sin exp − ; 4) i(t) = 1 + − cos + sin exp − ; 5) Faire un schéma 2 2 τ τ τ 2R τ τ τ E 1 E 1 et U = ; 6) Q = √ > , équivalent du montage lorsque le régime permanent continu est atteint : I = 2R 2 2 2 donc régime transitoire pseudo-périodique. Rép : 1) Exprimer u = uC , u = uR et la loi des nœuds en fonction de i, u et SP9-E7 ele Circuit RLC parall` 1) Déterminer l’équation différentielle vérifiée par i en fonction de : 1 ω0 = √LC et Q0 = RCω0 . 1 . 2) On pose λ = 2Q0 Déterminer i(t) sachant que i(t = 0) = i0 6= 0 et u(t = 0) = 0. On distinguera trois cas : a) λ = 1, b) λ > 1 et c) λ < 1. 3) Une fois le régime établi, on branche en parallèle un générateur de Thévenin, de f.é.m. E constante et de résistance interne r. Pour t < 0 le condensateur est donc déchargé et la bobine idéale n’est parcourue par aucun courant. Déterminer par un raisonnement direct les valeurs initiale (en 0+ ) et asymptotiques (t → +∞) de la tension u et des intensités dans les quatre branches. 4) Établir l’équation différentielle vérifiée par iR intensité traversant la résistance R en posant : Rr RrCω0 1 = et Q= ω0 = √ R+r (R + r)Lω0 LC 5) Donner la relation entre R, r, L et C pour qe le régime soit de type pseudopériodique et exprimer iR dans ce cas. R ω0 di 1 d2 i et Q = RCω0 = + + ω02 i = 0 avec ω0 = √ ; dt2 Q dt Lω0 LC √ i0 2.a) λ > 1 : i(t) = −r2 er1 t + r1 er2 t avec r1/2 = −λω0 ∓ ω0 λ2 − 1 ; 2.b) λ = 0 : i(t) = i0 (1 + r1 − r2 √ t 1 sin ωt ) exp − et ω = ω0 1 − λ2 . avec τ = λω0 t)e−λω0 t ; 2.c) λ < 1 : i(t) = i0 (cos ωt + τω τ λω0 Rép : 1) SP9-E8 Amortissement critique d’un oscillateur Un système de suspension de véhicule est décrit par une grandeur vibratoire x(t) dont l’évolution est régie par une équation du second ordre. Phase de simulation : Lors de la phase de simulation réalisée en l’absence d’amortisseur, la trajectoire de phase est une ellipse qui passe par les points P0 (x0 , 0) et P1 (0, vl ), dans le plan de phase de coordonnées (x, x). ˙ 1) Quel est ce comportement ? 2) Déterminer la pulsation ω0 en fonction des seules valeurs x0 et v1 , puis la loi horaire x(t). 3) S’il s’agit d’un oscillateur mécanique de masse m et d’élongation x(t), quelle loi de force → − f (x) est en jeu ? Réglage de l’amortissement : Les concepteurs choisissent d’installer un amortisseur, qui met en jeu un frottement visqueux, ajusté de manière telle que : x ¨ + 2ω0 x˙ + ω02 x = 0 4) Partant des conditions initiales x(0) = x0 et z0 = 0, quelles sont les lois d’évolution x(t) et x(t) ˙ ? 5) En déduire la trajectoire de phase correspondante, dont on précisera le point extremum en vitesse. 6) Quelles raisons ont conduit les concepteurs à choisir ce type de régime ? [email protected] http://atelierprepa.over-blog.com/ 3
© Copyright 2026 Paperzz