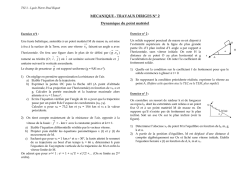
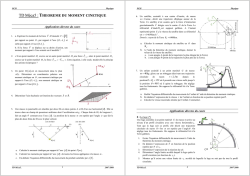
Spéciale PC Thème TD Physique Année 20132014 TD n° 30. Dynamique des solides et systèmes de solides. Donné le : 27 / 02 / 14. 1 Solides en contact avec ou sans glissement. lindres identiques tournant en sens inverses à la vitesse angulaire ω constante. Les axes des deux cylindres sont xes dans le référentiel du laboratoire supposé galiléen, parallèles et distants de 2`. On note fc le coecient de frottement de glissement cinétique de la planche sur les cylindres. À l'instant initial, la planche est abandonnée sans vitesse initiale, son centre d'inertie G n'étant pas sur l'axe Oy. 1.1 Mesure d'un coecient de frottement. On considère le dispositif ci-dessous. m1 y x O g I1 m2 I2 G z O O1 w h x w O2 z 1°) La vitesse de rotation des cylindres est susamment grande pour que la planche glisse toujours sur les cylindres. En supposant un mouvement de la planche dans le sens des x %, représenter les actions de contact des rouleaux sur la planche en I1 et I2 en précisant les sens des forces de frottement. 2°) Appliquer à la planche le théorème du centre de masse (ou théorème de la résultante cinétique) ainsi que le théorème du moment cinétique en G dans le référentiel barycentrique et en déduire les composantes verticales des réactions des deux cylindres en fonction de l'abscisse xG de G. 3°) Montrer que cette planche eectue alors des oscillations harmoniques dont on exprimera la période en fonction de `, g et fc . (Ce dispositif constitue une méthode originale et souvent utilisée pour mesurer un coecient de frottement, connue sous le nom d'appareil de Timochenko). 4°) Retrouver l'équation du mouvement par une étude énergétique (on notera que la planche ne constitue pas un système conservatif). La poulie est sans masse et la liaison pivot parfaite. Le l est inélastique et sans masse et ne glisse pas sur la poulie. On abandonne le système à l'instant t= 0 sans vitesse initiale. La masse m2 s'immobilise sur un support après qu'elle est descendue d'une hauteur h. On constate que la masse m1 poursuit son mouvement puis s'immobilise après avoir parcouru une distance supplémentaire d. Montrer comment cette expérience permet de calculer le coecient de frottement f de la masse m1 sur la table. 1.2 Chute d'une barre pesante. Une barre OM de masse m, de longueur 2`, posée quasi verticalement sur le sol se met à tomber en restant dans le plan vertical (Oxy). x M q g 2ℓ 2 Solides en rotation autour d'un axe xe. i Dans un premier temps, y O j on envisage un mouvement sans glissement. L'extrémité basse de la barre, en O reste donc xe. On connaît J le moment d'inertie de la barre autour de l'axe (Oz). ~ = Rx~i + 1. Exprimer la réaction du support R ~ Ry j en fonction de m, `, J , g et θ. 2. Conditions du glissement ou non en O ? 2.1 Un problème de bifurcation en mécanique. 1.3 Comment obtenir un oscillateur harmonique avec du frottement de glissement! Une planche mince (épaisseur négligée) homogène de masse m repose horizontalement sur deux cy- 1/ 2 Une tige homogène de masse m et de longueur OA = ` est accrochée en O par une liaison pivot supposée parfaite lui permettant une rotation autour de l'axe horizontal Oy dans le plan vertical (xOz). L'axe Oy est mis en rotation autour de l'axe vertical Oz à la vitesse angulaire supposée constante ω . z x y O g A On constate que pour ω < ωc , la tige reste verticale, mais que si ω > ωc , OA s'incline de façon stable de la verticale d'un angle θ tout en tournant autour de l'axe Oz (voir gure), avec θ % si ω % . Ce type de comportement avec deux types de solutions possibles selon une valeur seuil d'un paramètre constitue en physique une "bifurcation". l'élément de tige de masse dm = µdξ en M, entre ξ et ξ + dξ . En déduire par intégration sur la tige − − − OA les composantes dans la base (→ e x, → e y, → e z ) de − → (M O )ie . c) Déduire du théorème du moment cinétique en O appliqué à la tige en équilibre dans R0 la relation liant θ, g, ` et ω . Retrouver le critère de bifurcation établi en 1°) c). 1°) Interprétation du phénomène dans le référentiel du laboratoire supposé galiléen. exprimer dans la base 2.2 Oscillations harmoniques d'un système poulie + ressort. exprimer dans la base Dans le dispositif représenté sur la gure ci-dessous, le disque homogène de masse m, de rayon R et de 1 moment d'inertie JGy = mR2 , ne glisse pas sur le 2 l. a) Étude cinématique : − − − (→ e x, → e y, → e z ) la vitesse d'un point M de la tige tel −−→ − que OM = ξ → u. b) Étude cinétique : − − − (→ e x, → e y, → e z ) le moment cinétique élémentaire par → − rapport à O d L O (M ) de l'élément de tige de masse dm = µdξ en M, entre ξ et ξ + dξ , où µ = m/` désigne la masse linéique de la tige. En déduire par intégration les composantes sur la − − − base (→ e x, → e y, → e z ) du vecteur moment cinétique → − L O de la tige OA. écrire dans Rlabo supposé galiléen le théorème du moment cinétique en O au système tige en supposant θ = cste. Faire apparaître l'eet de seuil précédemment décrit et exprimer la pulsation critique ωc conduisant à une inclinaison stable de la tige autre que θ = 0. I1 2°) Interprétation du phénomène dans le référentiel lié à la tige. g c) Étude dynamique : A y I2 x z Soit le référentiel R0 lié aux axes Ox, Oy, Oz . Ce référentiel n'est pas galiléen du fait de la rotation de Oy dans Rlabo et il convient de prendre en compte, pour l'équilibre relatif de la tige la force d'inertie d'entrainement de R0 par rapport à Rlabo . Le l est inextensible et sans masse. le ressort est sans masse, de raideur k et de longueur à vide `0 . On repère le mouvement par la cote z du centre d'inertie G du disque, par l'angle θ et par la longueur ` du ressort. On xe l'origine z = 0 lorsque ` = `0 (ressort non tendu). le champ de pesanteur → − − g = −g → e z est uniforme. Rappeler l'expression de l'accélération d'entrai−−→ nement d'un point M de la tige OA tel que OM = − ξ→ u. a) − → Déterminer la période des oscillations. On justiera la méthode utilisée. Exprimer le moment élémentaire d(M O )ie par rapport à O de la force d'inertie d'entrainement de b) G q 2/ 2
© Copyright 2026 Paperzz