画像解析論(10)
画像解析論(10)
-最適化の基礎-
東京工業大学 長橋 宏
主な講義内容
• 最適化と画像処理
• 最適化手法の三要素
• 確率と乱数
• 勾配法
• EMアルゴリズム
1
画像解析論(10)
2
最適化に基づく画像処理の必要性
理由
ビジョン問題では,観測時の雑音やオクルージョンに
起因する不確かさが存在し,完全に正確な解を得るこ
とは困難.
多くのビジョン問題が最適化問題として
定式化される
画像解析論(10)
3
画像処理の最適化と統計的手法
画像処理における最適化とは,ある基準に基づいて
最も良く目的を達成することを目指すもの.
統計的画像処理とは,画像の表現に統計モデルを導入し,
そのモデルパラメータを最良推定することで,結果とし
て目的とする画像を得る手法.
統計的画像処理手法では,MRFやGRFによるモデル化
がしばしば利用される.
画像解析論(10)
最適化手法における三要素
1.問題の表現
どんな特徴で解を形式化(表現)するか
2.目的関数
最適化をどのように基準化するか
3.最適化アルゴリズム
どのようにして最適値を探索するか
4
画像解析論(10)
目的関数の形式化
表現のスキーム
最適化アルゴリズム
•目的関数とその最適化法とは密接に関係.
•目的関数としては,エネルギー関数や(対数) 尤度関数,
事後確率など.
•最適化手法には様々な方法があって,それぞれ特徴あり.
5
画像解析論(10)
最適化基準
データ分布のみがあり、推定量の事前情報がない
最大尤度 (maximum likelihood)推定
逆の場合
最大エントロピー (maximum entropy)推定
推定量の事前情報とデータ分布がともに既知
Bayes基準
最大事後確率(maximum a posterior : MAP)推定
最大事後確率平均(maximum a posterior mean : MPM)推定
6
画像解析論(10)
エネルギー関数
エネルギー関数の役割
1.解の大局性を定量的に表現.
2.最小解に対する探索の指針を提供.
エネルギー関数の定式化
パラメトリックな表現
ノンパラメトリックな表現
基本的方法
最小解 f * : 関数形式 E とパラメータ に依存
f * arg min E ( f | d , )
f
d は観測データ
7
画像解析論(10)
事象・集合・確率
・ある操作を行うこと: 試行 ・試行によって起こる事柄: 事象
・基本的な事象の1つ1つ: 根元事象
・根元事象全体の集合: Ω={1 , 2 , n }
・試行の結果起こる事象A: A Ω
・2つの事象AとBが同時には起こらないとき,A B
と書き,2つの事象は互いに排反であるという.
・根元事象は互いに排反である.
n( A)
・事象Aの確率P( A)
;
n( Ω )
P( Ω ) 1
P( ) 0
n( A) : 事象Aの要素の数
8
画像解析論(10)
Bayesの定理
H n (n 1,, n) : 排反、網羅的な事象系列
E : 任意の事象
P( H n | E) P( E) P( E | H n ) P( H n ) P( H n , E)
従って、P( E ) 0が与えられると、
P( H n ) P( E | H n )
P( H n | E )
P( E )
P( E | H n ) P( H n )
P( E | H m ) P( H m )
m
P( E | H n ) P( H n )
9
画像解析論(10)
確率変数と確率分布
『例』サイコロ
サイコロを振る操作:試行
いずれかの目が出る:根元事象
根元事象に割り当てられた数値:実現値{1,2,3,4,5,6}
試行にともなって出る目を表す変数 X:確率変数
確率変数Xの実現値が離散的:離散的確率変数
連続的:連続的確率変数
10
画像解析論(10)
離散的確率分布
離散的確率変数の各実現値の得られる確率が既知の
とき
P ({i ; X (i ) xi }) P ( X xi ) Pi ,
n
P 1,
i 1
i
Pi:確率関数
と表し,確率変数 X に確率分布が与えられている
という.
11
画像解析論(10)
連続的確率分布
確率変数Xの実現値xが連続な場合,実現値の微小区間を
考え,Xの実現値がこの間に入る確率を次のように表す.
P( x X x x) p ( x)x
p ( x)を確率密度関数といい, p ( x)dx 1
(累積)分布関数 F(x)
F ( x) Pi
離散的確率分布
xi x
x
F ( x)
p( x)dx
連続的確率分布
12
画像解析論(10)
正規分布
ある連続的確率変数Xが平均 , ,分散 2の正規分布に
従うとき,
P( X x) p( x)
1
e
( x ) 2 / 2 2
2
であり,x ~N ( , 2 ) と表す.
2
中心極限定理
同一の分布に従う,互いに独立なN個の離散的確率変数
X 1,X 2,
,X N の和で表される確率変数の分布は,適当な
変数変換と N で,正規分布N (0,1)となる.
13
画像解析論(10)
14
標本抽出と母集団
• 全体から選び出されたもの:標本
• 標本の背後に存在する全体:母集団
• 母集団から標本を抽出する操作:標本抽出
大きな母集団から x1 , x2 ,, xnという値の標本をサンプリング :
母集団と同じ確率的構造をもつ,互いに独立な n個の
確率変数X 1 , X 2 ,, X nが,それぞれ x1 , x2 ,, xn の実現
値を持つことと同等。
互いに独立で同一な確率分布に従うn個の確率変数:
i.i.d.(independently and identically distributed)な確率変数
画像解析論(10)
乱数発生法
• 一様乱数 :: メルセンヌ・ツイスタ法
M.Matsumoto and T.Nishimura, Mersenne twister: A 623 dimensionally
equidistributed uniform pseudorandom number generator, ACM Trans. on Modeling
and Computer Simulation,1998
• 正規分布乱数 :: ボックス・ミューラ法
2個の一様乱数𝑟1 , 𝑟2 から,正規分布𝑁(0,1)に従う2個の正規
乱数𝑧1 , 𝑧2 を以下の式で発生.
𝒛𝟏 = (−𝟐 log 𝑟1 )𝟏/𝟐 ∙ cos(2𝜋𝑟2 )
𝒛𝟐 = (−𝟐 log 𝑟1 )𝟏/𝟐 ∙ sin( 2𝜋𝑟2 )
𝑵(𝝁, 𝝈𝟐 )に従う乱数は,変換𝝃𝒊 = 𝝁 + 𝝈𝟐 𝒛𝒊 で発生可能.
• その他の分布の乱数 ::
棄却サンプリング、SIR、MCMC等の方法で発生
(rejection sampling or acceptance - rejection method)
15
画像解析論(10)
16
非線形最適化問題
単峰性関数最適化
問題の分類
制約なし最適化
多峰性関数最適化
非線形最適化問題
等式制約下での最適化
制約つき最適化
不等式制約下での最適化
手法の分類
最急降下法
勾配法
Newton法
非線形最適化手法
共役勾配法
シンプレックス法
直接探索法
実数値GA
画像解析論(10)
制約なし非線形最適化問題
〔問題1〕
minn : f ( x )
xR
ここで、 f は Rn上で定義される非線形関数.
f ( x * ) f ( x)
for x R n
が成り立つとき、 x* を〔問題1〕の大域的最適解
(global optimal solution)という。
f ( x* ) f ( x) for x N ( x* , ) {x | || x* x || }; x*の近傍
が成り立つとき、 x* を 〔問題1〕の局所的最適解
(local optimal solution)という。
17
画像解析論(10)
最適性条件
(仮定)f : R n Rは2階連続微分可能とする.
f ( x) 0 を満たす点 x : f の停留点(stationary point)
点 xが 問題1の局所的最適解ならば,f ( x ) 0.
f が凸関数であるとき,点 x が 問題1の大域的
最適解であるための必要条件は,f ( x ) 0 .
18
画像解析論(10)
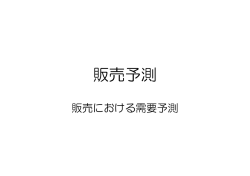
f(x)
O
A, B, C, D:停留点 (stationary point)
A, C:局所的最適解 (local optimal solution)
C:大域的最適解 (global optimal solution)
A
B
C
D
x
19
画像解析論(10)
降下方向
f ( x )T d 0なるベクトル d を、
点 x における f の降下方向と言う.
(n, n)の正定値対称行列Bに対して
d ' Bf ( x )
とすれば、
f ( x )T d ' f ( x )T Bf ( x ) 0 となる.
従って、d ' Bf ( x ) は降下方向条件を満たす.
特に、Bが単位行列のとき、
d ' f ( x )
を最急降下方向
(steepest descent direction)
と言う.
20
画像解析論(10)
降下方向の例
∇f(x(0))
x(0)
d(1) =-B(1)∇f(x(0))
d(2) =-B(2)∇f(x(0)) -∇f(x(0))
21
画像解析論(10)
22
勾配法の概要
Step1: 初期探索点 x ( 0 )を選択.k 0
Step2 : 適当な正定値対称行列B ( k )で降下方向d ( k )を決定.
d (k ) Bf ( x ( k ) )
Step3 : ステップ幅a ( k )を決定.
直線探索
a ( k ) arg min f ( x ( k ) ad ( k ) )
a
を解き、x ( k )を更新.
x ( k 1) x ( k ) a ( k ) d ( k )
Step4 : f ( x ( k 1) ) 0であれば探索終了.
そうでなければ k k 1としてStep2へ.
B(k)が単位行列のとき,最急降下法(steepest descent method)
画像解析論(10)
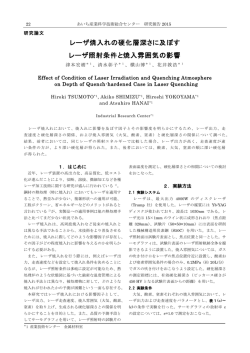
最急降下法の収束性
d (3) x ( 4)
x (3) ( 2)
d
x (1)
d ( 0)
d (1)
x ( 2)
d ( k ) f ( x ( k ) )
x ( 0)
23
画像解析論(10)
24
ニュートン法
最初に,目的関数として狭義凸2次関数を考える.
1 T
V: positive definite and
f ( x ) x Vx c T x c0
2
symmetric
f ( x ) Vx c, 2 f ( x ) Vより,最適解 x *は
x V 1c ( 2 f ( x )) 1 c
ここで,B ( 0 ) V 1 ( 2 f ( x ( 0 ) )) 1とおけば,初期点x ( 0 )
に対し, d ( 0 ) B ( 0 )f ( x ( 0 ) ) V 1 (Vx ( 0 ) c ) x * x ( 0 )
よって,目的関数が凸2次関数であれば,
x (1) x ( 0 ) d ( 0 ) x (step size : 1)
となり,次の探索点を決定すれば,1回の試行で
最適解 x が求まる.
狭義凸2次関数以外に対しても一般的に,
d ( k ) (2 f ( x ( k ) ))1 f ( x ( k ) )で降下方向決定
Newton法
画像解析論(10)
ニュートン法の概要
Step1 初期探索点 x ( 0 )を選択.k 0
Step2 正定値行列 B( k ) を,B ( k ) (2 f ( x ( k ) ))1とし,
d ( k ) (2 f ( x ( k ) ) 1 f ( x ( k ) ) とする.
Step3 ステップ幅を, ( k ) 1 として,
x ( k 1) x ( k ) ( k )d ( k )
Step4 f ( x ( k 1) ) 0であれば探索終了.
そうでなければ,k k 1 としてStep2へ
Step3で,ステップ幅を ( k ) arg min f ( x ( k ) d ( k ) )
と直線探索 :
直線探索付きニュートン法
25
画像解析論(10)
修正ニュートン法
最適解近傍は凸2次関数で近似可能であり、探索が
進めばニュートン法は効率的.しかし,( 2 f ( x)) 1 の
存在が保証されない.
2 f ( x)の対角要素に適当な値を加え、正定値化した
行列を作成. 修正ニュートン法(Levenberg-Marquart法)
d
(1 ) f ( x
ここで, 0 1
(k )
2
(k )
) I
1
f ( x ( k ) )
ニュートン法と最急降下法の混合.
ヘッセ行列の計算が重い.
26
画像解析論(10)
27
ニュートン法
最急降下法
d ( k ) f ( x ( k ) )
d ( k ) (2 f ( x ( k ) ))1f ( x ( k ) )
修正ニュートン法
d
(k )
(1 ) f ( x
2
(k )
) I
1
f ( x ( k ) )
画像解析論(10)
28
Fletcher-Reeves法(共役勾配法)
Step1 初期探索点x ( 0)を選択.
d ( 0) f ( x ( 0) ), k 0
Step2 f ( x ( k ) ) 0ならば終了.
(k ) T
(k )
f
(
x
)
f
(
x
) ( k 1)
(k )
(k )
d f ( x )
d
,k 1
( k 1) T
( k 1)
f ( x
) f ( x
)
Step3 ステップサイズの決定
( k ) arg min f ( x ( k ) d ( k ) ) を解き,
0
x ( k 1) x ( k ) ( k ) d ( k ) , k k 1 とする.
Step2へ戻る.
画像解析論(10)
等式制約の下での最適化
〔問題4:等式制約〕
minn f ( x) subj.to gi ( x) 0 (i 1,, m)
xR
ラグランジュ関数
〔問題4:等式制約〕のラグランジュ関数は
m
L( x, λ) f ( x ) i g i ( x ),
i 1
i (i 1,, m) : ラグランジュ乗数
29
画像解析論(10)
ラグランジュの未定乗数法
〔問題4〕のラグランジュ関数がx とλで局所的
最適解を持つための必要条件は,
x L ( x , λ) x x , λ λ 0 , λ L ( x , λ) x x , λ λ 0
m
x L( x, λ) x x , λ λ f ( x * ) *i g i ( x * ) 0
i 1
λ L( x, λ) x x , λ λ ( gi ( x * ), i 1,, m)T 0
KKT条件と等しい.
30
画像解析論(10)
31
ラグランジュ未定乗数法(最小化問題)の例
min f x12 x22 x32
x1 , x2 , x3
subj.to 6 x1 2 x2 4 x3 42
ラグランジュ関数は,
L( x1 , x2 , x3 , ) ( x12 x22 x32 ) (6 x1 2 x2 4 x3 42)
最適性条件より
2 x1 6
x L 2 x2 2 0, L 6 x1 2 x2 4 x3 42 0.
2x 4
3
が得られる.各変数をで表し,制約式に代入すれば,
3 2 .従って,最適解は ( 9 2 , 3 2 ,3),最適値は 63 2 .
画像解析論(10)
EMアルゴリズム
(Expectation Maximization)
EMアルゴリズムとは,不完全データから最尤推定値を
求める理論的な枠組み.
(1977, Dempster, Laird, Rubin)
不完全データとは,欠損値を含むデータだけではなく,
本来観測できない変数(隠れ変数や潜在変数)を含めた
データの総称
観測データ集合𝐷,隠れ変数集合 𝑍,モデルパラメータ 𝜃
とすると,対数尤度関数 𝐿(𝐷, 𝜃)は
L( D,θ ) log p ( D | θ ) log p ( D, Z | θ )
EM法では,対数尤度関数の代わりに,次に示す条件付
き期待値を逐次的に最大化する.
32
画像解析論(10)
33
Q(θ | θ (t ) ) EZ {log p ( D, Z | θ ) | D, θ (t ) } (隠れ変数による平均)
P( Z | D, θ (t ) ) log p ( D, Z | θ )
Z
𝜽に関して以下のように逐次的に𝑸の最大化を行う.
𝜽 ∶ パラメータ変数
𝜽(𝒕) : 𝒕回目の繰り返しにおける各パラメータの値
EMアルゴリズム
Step1. 初期値 (0)を設定し,t 0とする.
Step2. 収束するまで以下の処理を繰り返す.
E - step : Q( | (t ) )を計算.
M - step : (t 1) arg max Q( | (t ) )とし,t t 1とする.
θ
Q関数の最大化
対数尤度の最大化(最尤法)
画像解析論(10)
画像の統計モデル
m個の正規分布の混合分布
として画像が存在(仮定)
1次元度数分布
𝑑次元空間での分布
多次元混合正規分布モデル
m
p ( x | θ ) i N ( x; μi , Σ i )
i 1
34
画像解析論(10)
正規混合分布の最尤推定
(Gaussian Mixture Model : GMM )
正規混合分布:m個の正規分布の混合からなる分布
m
m
i 1
i 1
p( x | θ ) i N ( x; μi , Σ i ), ただし,
i 1
N ( ; μ, Σ )は,平均ベクトルμ R d , 共分散行列Σ R d dを
持つ多次元正規分布.
N ( x; μ, Σ ) (2 )
d / 2
|Σ|
1 / 2
1
exp{ ( x μ)T Σ 1 ( x μ)}
2
観測データ集合D { x j }Nj1 から,最尤法によって
未知パラメータθ { i , μi , Σ i }im1を推定する問題.
35
画像解析論(10)
36
EMアルゴリズムによるGMM推定
隠れ変数zi Z {z j }Nj1は,観測データxiがどの混合成分から
発生したのかを示す指標で,
{1,, m}のいずれかの値をとる.
(t )
(t )
p
(
x
,
z
i
|
θ
)
p
(
x
,
z
i
|
θ
)
(t )
n
n
n
n
P( zn i | xn , θ )
m
(t )
(t )
p( xn | θ )
p
(
x
,
z
i
|
θ
)
n
n
i 1
p ( x n , z n i | θ ) i N ( x n ; μi , Σ i )
より,
(E step)
m
N
Q(θ | θ ) P( z n i | x n , θ (t ) ) log p (x n , z n i | θ )
(t )
i 1 n 1
i(t ) N ( x n ; μi(t ) , Σ i(t ) )
i 1 n 1 m (t )
log{
N
(
x
;
μ
,
Σ
)}
i
n
i
i
(t )
(t )
N
(
x
;
μ
,
Σ
j 1 j
n
j
j )
m
N
画像解析論(10)
37
m
M - step:等式拘束条件( i 1)つきQ( | (t ) )の最大化.
i 1
ラグランジェの未定乗数法による解法
m
G (θ , ) Q(θ | θ ) ( i 1) として(ラグランジェ関数)
(t )
i 1
θ G (θ , ) |θ θ* ,λ λ* 0, G (θ , ) |θ θ* ,λ λ* 0
を満たす( * , * )を求める.
これを各成分毎に表すと,
Q( | (t ) )
Q( | (t ) )
G ( , )
0,
0,
0
1
i
i
i
が条件となる.
画像解析論(10)
38
以上のことを踏まえると,以下の更新式が得られる。
( t 1)
i
1
(t )
Ni
Σ i( t 1)
1
(t )
Ni
μ
N
(t )
P
(
z
i
|
x
,
θ
) xn ,
n
n
n 1
N
(t )
( t 1)
P
(
z
i
|
x
,
θ
)
V
,
n
n
ni
n 1
(t )
N
i(t 1) i
N
ただし, Vni( t 1) ( x n μi( t 1) )( x n μi( t 1) )T ,
N
N
(t )
i
P( zn i | xn , θ (t ) )
n 1
i( 0 ) , i( 0 ) , i( 0 )に適当な初期値を与え,上記反復処理を実行.
画像解析論(10) 39
付録
画像解析論(10)
直線探索(line search)
〔直線探索問題〕
min f ( x0 d 0 ), 0
x2
x0
このような1次元変数の最適化
d0
問題を解いてステップサイズ
を決定することを,直線探索
(line search)と呼ぶ.
x1
f ( x0 d 0 )
この直線探索問題を厳密に
とくことは一般的には困難.
効率的な近似解法.
黄金分割法
40
画像解析論(10)
41
黄金分割法(golden section method)
最小点 x*の存在区間を狭めるため
には,少なくとも区間内の2点の
関数値が必要.
縮小された区間内には1点残る
ので,この点を再利用.
最小点存在区間の幅を一定の比率
τで減らすためには、右図より
(1 ) (1 )
A
P
B
黄金分割比 :
AB PA
1
AP BP
1
1
(1 )
この方程式の正の根は
5 1
x1 x* x2
0.618 (黄金分割比) a
2
N回の評価で区間幅は(b a) N 1に縮小
b
画像解析論(10)
黄金分割アルゴリズム
(Step0) a (0) α, b(0) b, k 0, ' 1 .
(Step1) compute the following x1( k ) , x 2( k ) .
x1( k ) a ( k ) ' (b ( k ) a ( k ) )
(1)
x 2( k ) b ( k ) ' (b ( k ) a ( k ) )
(2)
(Step2) if f ( x1( k ) ) f ( x 2( k ) ), then
{ a ( k 1) x1( k ) , b ( k 1) b ( k ) , x1( k 1) x 2( k ) , k k 1,
compute x 2( k ) by eq.(2) }
else { b ( k 1) x 2( k ) , a ( k 1) a ( k ) , x 2( k 1) x1( k ) , k k 1,
(Golden section)
compute x1( k ) by eq.(1) }
(Step3) if x1( k ) x 2( k ) is sufficient ly small, then
{ set f ( x1( k ) ) to the minimum and terminate.}
else {goto Step2.}
42
画像解析論(10)
43
凸集合 (convex set)
集合F R nが
数学的
基礎-1
x1 , x 2 F , 1 , 2 R :
1, , 0 1 x1 2 x2 F
1
2
1 2
(convex set)
を満たすとき,Fは凸集合.
正定値行列 (positive definite matrix)
n次実正方行列Aに対して,任意のx ( 0 ) R n が
x T Ax 0 のとき,Aは正定値. (positive definite)
半正定値行列 (positive semi-definite matrix)
n次実正方行列A,任意のx ( 0 ) R n に対して,
(positive semi-definite)
x T Ax 0 のとき,Aは半正定値.
勾配ベクトル (gradient vector)
f f
f T
f ( x ) ( ,
,
)
x1 x2
xn
画像解析論(10)
44
テイラー展開1 (first order Taylor expansion)
関数f , その勾配fの間に次式の関係が成り立つ
数学的
0 1, f ( x d ) f ( x ) f ( x d )T d
基礎-2
T
f ( x d ) f ( x ) f ( x ) d o( d )
ヘッセ行列 (Hessian)
2
f
2
Hf ( x ) f ( x ), (Hf )ij
xi x j
(i, j 1, n)
テイラー展開 2 (second order Taylor expansion)
関数f , fのヘッセ行列の間に次式の関係が成り立つ
1 T
T
0 1, f ( x d ) f ( x ) f ( x ) d d Hf ( x d )d
2
1
2
f ( x d ) f ( x ) f ( x )T d d T Hf ( x )d o( d )
2
画像解析論(10)
凸関数 (convex function)
45
実数値関数 f に対し,集合 ( x, y ) R n R | y f ( x )
数学的 が凸集合のとき,関数 f は凸関数(convex function).
基礎-3 凸関数の性質 (property of a convex function)
f が凸関数のとき,fの定義域の2点 x1 , x2 ,任意の
0 t 1に対して,点(1 t ) x1 t x2は定義域に含まれ,
(1 t ) f ( x1 ) t f ( x2 ) f ((1 t ) x1 t x2 ) である.
狭義凸2次関数 (strictly convex quadratic function)
対称正定値行列V R nn , c R n , c0 Rによって
1 T
f ( x ) x Vx c T x c0
2
と表される f を,狭義凸2次関数と呼ぶ.
f ( x ) Vx c, 2 f ( x ) Vであり,最適解x は,
x V 1c
画像解析論(10)
ベクトルの内積の微分
a , x R n , A R nnとするとき, (a x ) a T x x T a
数学的
基礎-4
これより,aが定数ベクトルの場合
(a T x ) ( x T a )
a
x
x
行列との積の微分
f1 ( x )
Ax
, f i ( x )はスカラ関数
f ( x)
n
f1
f1 f1
xn
x1 x2
Ax
A
x
f n
f n f n
x x
xn
2
1
46
画像解析論(10)
47
𝑓 𝒙 = 𝒙𝑇 𝑨𝒙の微分
数学的
基礎-5
f ( x )はスカラ関数であり,以下の関係が成り立つ.
f ( x ) x T ( Ax ) ( AT x )T x
f ( x )をベクトルxの合成積と考え,積の微分を適用する.
この際,第1項目のxに関してはAxとの内積と考え,
第2項目のxに関してはAT xとの内積と考える.
これにより,
f ( x ) ( x T ( Ax )) (( AT x )T x )
( A AT ) x
x
x
x
もし,Aが対称行列であれば
f ( x )
2 Ax
x
画像解析論(10)
𝒙𝑇 𝑨𝒙 = 𝑡𝑟(𝑨𝒙𝒙𝑻 )の検証
数学的
基礎-6
a11 a12
として
x ( x1 , x2 ) , A
a21 a22
a11 a12 x1
a11 x1 a12 x2
T
( x1 x2 )
x Ax ( x1 x2 )
a21 a22 x2
a21 x1 a22 x2
a11 x1 x1 a12 x1 x2 a21 x1 x2 a22 x2 x2
T
a11 a12 x1
a11 a12 x1 x1 x1 x2
( x1 x2 )
Axx
a21 a22 x2
a21 a22 x1 x2 x2 x2
a11x1 x1 a12 x1 x2 a11x1 x2 a12 x2 x2
a21x1 x1 a22 x1 x2 a21x1 x2 a22 x2 x2
T
tr ( Axx T ) a11 x1 x1 a12 x1 x2 a21 x1 x2 a22 x2 x2
48
画像解析論(10)
(tr ( AB ))
について
A
(tr ( AB ))
BT
A
が言える.
( x T Ax )
について
A
x T Ax tr ( Axx T )の関係より,
( x T Ax ) (tr ( Axx T ))
( xx T )T xx T
A
A
49
© Copyright 2026 Paperzz