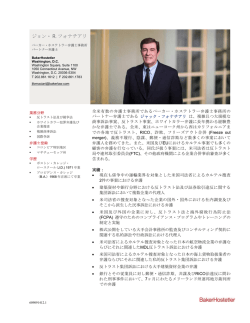
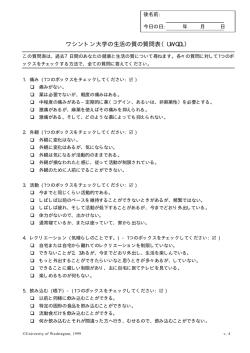
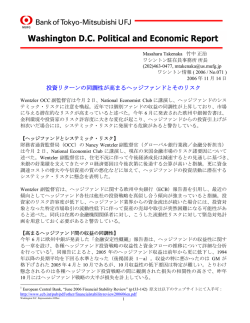
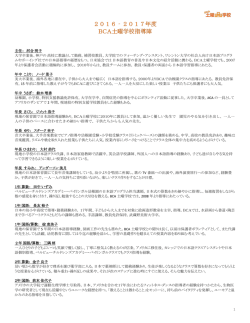
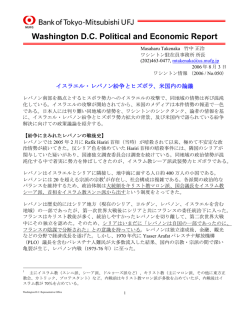
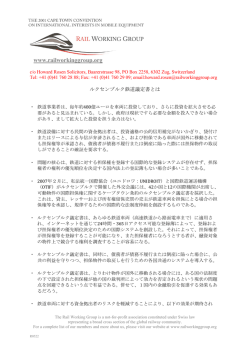
遠隔操作式の救助ロ ボット、救命活動に 力覚フィードバック を活用 "ワシントン大学と BluHaptics 社はNIと密に連携 し、 SmartAmerica Challenge (スマートアメリカ チャレンジ)に向け たSmart Emergency Response System(ス マートエマージェン シレスポンスシステ ム)の1つの構成要 素として遠隔操作式 のロボットを開発し ました。 " - Howard Jay Chizeck, University of Washington Department of Electrical Engineering ( http://www.ee.washington.edu/) 課題: ガス栓の閉止作業向 けに、高い精度で制 御/監視が可能な遠 隔操作式の移動ロ ボットを開発する。 地震によるガス漏れ といった災害への対 策で利用できるレベ ルを目指して、遠隔 操作式ロボットのシ ミュレーションを行 い、実際に駆動させ る。 ソリューション: リアルタイムコント ローラであるNI cRIO- 9024、NI LabVIEW Roboticsモ ジュール、 youBot APIを使用して、 KUKA社製の youBotを効率 的かつ高精度に制御 する機能を迅速に実 現する。加えて、ロ ボットの状態をリア ルタイムでオペレー タに通知できるよう にするとともに、力 覚仮想フィクスチャ をオペレータ向けの インタフェースに組 み込んで、オペレー タのパフォーマンス の向上を図る。 ユーザ事例の続きを 読む お客様名: Howard Jay Chizeck - University of Washington Department of Electrical Engineering (http://www.ee.washington.edu/) Kevin Huang - University of Washington Department of Electrical Engineering 私たちが所属するワ シントン大学電気工 学科のバイオロボティクス 研究室 (http://brl.ee.washington.edu/)は、遠隔操作式ロ ボットの分野の研究 に注力しており、多 様なアプリケーショ ンにわたってさまざ まな種類の遠隔操作 を実用化できないか どうか可能性を探っ ています。そうした アプリケーションの 1つに、応答者が命 を落とすリスクを排 除することを目的と して、遠隔操作式ロ ボットを代わりに送 り込む捜索救助活動 があります。残念な がら、複雑な作業や 困難を伴う作業を担 わせるうえでは、多 くの場合、ロボット の自律性が不足して いることが問題にな ります。それに対 し、遠隔操作を利用 する方式であれば、 人間の経験と専門知 識によって制御を補 助することで、ロ ボットの作業を改善 することが可能で す。つまり、人間の 意識や理解力と機械 の精度/拡張性/再 現性とを組み合わせ ることで、それらに よる相乗効果が得ら れるということで す。 遠隔操作システムの 基本的なアーキテク チャには、2つの大 きな構成要素があり ます。オペレータス ペースと遠隔環境で す。通常、オペレー タスペースはマスタ ロボットデバイスを 中心に配して構成さ れています。そのマ スタロボットデバイ スの操作は人間が行 います。オペレータ スペースからのコマ ンドは遠隔装置に送 信され、遠隔装置が 遠隔環境との間で情 報をやりとりしま す。多くの場合、遠 隔環境に関する情報 はオペレータに提示 されます。災害対策 のように人の生死に かかわり、細心の注 意が求められる状況 では、安全性とオペ レータのパフォーマ ンスを最大限に高め る必要があります。 そのためには、遠隔 装置の制御に最適な インタフェースをオ ペレータ向けに用意 することが不可欠で す。 そうしたイン タフェースの役割に は、センサやロボッ トの状態に関する情 報を提供することだ けでなく、オペレー タのパフォーマンス を最大限に高めるた めのフィードバック や支援の手段を提供 することが含まれま す。私たちのチーム では、研究の対象と する遠隔操作のモー ドとして、力覚(触 覚)のフィードバッ クを活用する双方向 遠隔操作を選定しま した。このモードで は、オペレータが遠 隔操作式ロボットに コマンドを送り、マ スタデバイスを介し て力覚フィードバッ クを受信します(図 1)。オペレータに 送信される力覚 フィードバックは、 遠隔装置の状態や構 成(コンフィギュ レーション)に基づ くものです。 遠隔装置 遠隔装置に搭載する 主要なハードウェア プラットフォームと しては、KUKA社 のyouBotとナ ショナルインスツル メンツ(NI)の CompactRIO ( http://www.ni.com/compactrio/ja)を採用しました。 youBotのハー ドウェアは、全指向 性のベース部と、グ リッパを有する5自 由度(DOF: Degree of Freedom)の ロボットマニピュ レータなどで構成さ れます。遠隔環境に 関する情報を得るた めに、アルミフレー ム構造を用いて youBotのベー ス部に PrimeSense 社(Apple社が 買収)製のカメラで ある Carmine RGB-Dを取り付 けました。 このカ メラは1次センサと して機能し、目標と する作業空間の体積 に関する幾何学情報 を提供します。ま た、ASUS社製の ACルータを使用 し、リモートの youBotとロー カルのマスタコン ソールステーション との間で無線通信を 確立しました。 オペレータ向けのマ スタコンソール マスタコンソールス テーションにおい て、ユーザはRGB 深度情報に基づいて ボクセル化された遠 隔環境の3Dマップ を視覚フィードバッ クとして受信します (図2)。なお、ボ クセル化する前の RGBストリームを 利用することも可能 です。ロボットが作 業を行っている際に は、ロボットの構成 と状態を記録するこ とが重要です。今回 の実装では、LabVIEW Roboticsモ ジュール ( http://sine.ni.com/nips/cds/view/p/lang/ja/nid/209856)を導入し、 youBotの構成 とモータ用エンコー ダによる測定値を記 録し、その情報を視 覚化してユーザにリ アルタイムで提示す るようにしました。 ロボットを制御する 際、オペレータは USBに対応する ジョイスティック ゲームパッド (Logitech 社製)を使用して CompactRIO ベースのシステムに ナビゲーションコマ ンドを送信し、 youBotの全指 向性ベース部を駆動 します。テレオペ レータは、マスタの 力覚装置である PHANTOM Omni (SensAble Technologies 社製)を介して、 youBotのマニ ピュレータにコマン ドを送信します。こ の力覚装置から CompactRIO に3つのDOFコマ ンドが送信されるこ とで、youBot のエンドエフェクタ の位置が制御され、 ユーザに対して3種 のDOF運動感覚 フィードバックが送 信されます。 ユーザに提示する力 フィードバックにつ いて決定を行うの が、誘導の役割を担 う力覚仮想フィクス チャです。この仮想 フィクスチャは、手 を押したり引いたり することで、オペ レータが所定の経路 に沿ってロボットを 動かせるように支援 を行います。今回 は、90度の円弧 と、入口と出口の位 置とを組み合わせた 経路を使用すること にしました(図 3)。ロボットは ユーザが送信したコ マンドに正確に従い ます。そのため、栓 の閉止作業を正しく 完了するには、ロ ボットに対してユー ザから有効な軌道を 提供する必要があり ます。その軌道を維 持できるようユーザ を支援するのが力覚 仮想フィクスチャで す。ユーザがロボッ トに対するコマンド を仮想フィクスチャ に入力する際、望ま しい経路からユーザ が外れ始めたら力 フィードバックが送 信されます。それに より、ユーザが入力 した軌道に従って栓 の閉止作業を確実に 完了することが可能 になります。この仮 想フィクスチャ技術 は、ワシントン大学 と BluHaptics 社が共同で開発しま した。 NIのテクノロジ リアルタイムコント ローラとして CompactRIO を採用する前は、 youBotの制御 方法として youBotの内蔵 コンピュータにイン ストールした youBot ROSパッケージを 使用する方法を試み ていました。その結 果、 Carmine RGB-Dからの データのポーリング や、圧縮、送信に 伴って遅延が生じる ことや、カスタマイ ズ/デバッグが困難 であることが問題に なりました。また、 逆運動学や、モータ ジョイントの読み取 り、youBotの 視覚モデルといった 問題にそれぞれ低レ ベルで取り組まなけ ればならず、試行錯 誤的な調整が必要に なりました。マニ ピュレータを採用す るとジッタが生じる ことがあり、最終的 には望ましい構成へ と収束するのです が、センサやエン コーダからの値のロ ギングや、グラフィ カル表示を使用しな ければ、問題の解決 は困難でした。 NIのエンジニアに よるサポートの下、 NIが提供する youBotのサン プルプロジェクトを 試用した結果、私た ちが抱えていた問題 の多くは CompactRIO を採用することで解 決できることがわか りました。具体的に は、 EtherCATの インタフェースと youBotの制御 /シミュレーション 用のVIによって、 ロボットの制御や、 ロボットの状態監視 に適した柔軟性の高 いリアルタイムソ リューションを実現 できるということで す。また、制御用の ハードウェアのセッ トアップをシームレ スに進めることがで き、簡素なカスタム のUDPパッケージ によって既存のマス タコンソール用ソフ トウェアとのインタ フェースを確立する ことができました。 さらに、センサから 取得した測定値のグ ラフィカル表示と、 ロボットの構成のシ 1/3 www.ni.com トウェアとのインタ フェースを確立する ことができました。 さらに、センサから 取得した測定値のグ ラフィカル表示と、 ロボットの構成のシ ミュレーションに よってユーザインタ フェースを改良し、 ネットワーク共有 シェア変数を使って 実装を行いました。 こうしたNIのハー ドウェア/ソフト ウェアソリューショ ンにより、私たちの チームが望む安定性 と低レベルの制御が 得られ、設計作業を 加速することができ ました。加えて、柔 軟性が向上し、シス テムレベルでほかの コンポーネントを拡 張したり、カスタマ イズしたりすること も可能になりまし た。 NIのテクノロジ: youBotのマニ ピュレータをリアル タイムで確実に制御 できるようになり、 ジッタを排除するこ とができた ロボットのジョイン トの状態を、すぐに 使用できるリアルタ イムのグラフィカル 表示によって確認で きる。これを、デ バッグに活用できる 情報として提供する ことが可能になった 視覚化と監視を行う ために、ロボットの 構成のシミュレー ションを行うことが できた シームレスに起動を 自動化することがで きた 統合型の遠隔操作式 ロボットシステムの 設計/構築を加速す ることができた 私たちのチームは、 NIのテクノロジを 活用することによ り、サイバーフィジ カルシステムに焦点 を当てた2014 SmartAmerica Challenge ( http://smartamerica.org/)向けに、 Smart Emergency Response Systemの主要 な構成要素として、 力覚フィードバック を活用した遠隔操作 用プラットフォーム を開発しました。よ り多くの人命を救う ための災害対策の有 用性と安全性を向上 するための手段とし て、力覚仮想フィク スチャと遠隔操作式 ロボットの研究発表 をワシントンDCで 行い、多くの注目を 集めることができま した。 著者情報: Kevin Huang huangk2@uw. edu お客様情報: Howard Jay Chizeck University of Washington Department of Electrical Engineering (http://www.ee.washington.edu/) 図1. 遠隔操作式 ロボットシステムの アーキテクチャ 図2. 3Dボクセ ルマッピングによっ て、体積深度に関す る情報をユーザに提 供する。 2/3 www.ni.com 図3. 力覚仮想 フィクスチャによっ てユーザを経路に 沿って誘導すること で、栓の閉止作業を 安全かつ効率的に完 了することができ る。 法律関連事項 このユーザ事例(こ の「ユーザ事例」) はナショナルインス ツルメンツ (「NI」)の顧客 によって作成された ものです。このユー ザ事例は「現状のま ま」提供され、一切 の保証を伴いませ ん。また、このユー ザ事例の使用につい ては、本サイトの使 用条件でより具体的 に記載されていると おり、一定の制限を 受けます。 3/3 www.ni.com
© Copyright 2026 Paperzz