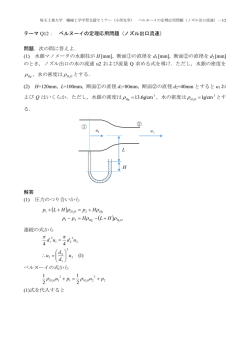
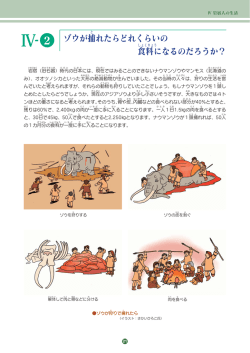
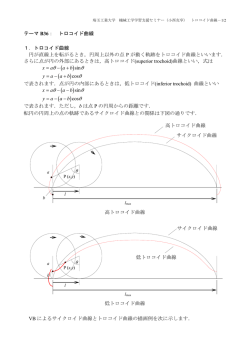
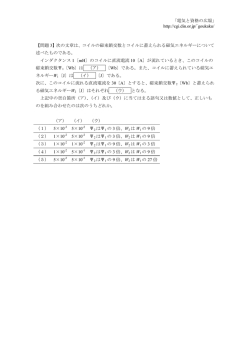
埼玉工業大学 テーマ G01: 機械工学学習支援セミナー(小西克享) 慣性モーメント-1/6 慣性モーメント(Moment of inertia) コマ回しをすると,長い時間回転させるには重くて大きなコマを選ぶことや,ひもを早 く引くことが重要であることが経験的にわかります.遊びを通して,回転の運動エネルギ ーを増やせば,回転の勢いが増すことを学習できるので,機械系の学生にとってコマ回し も大切な体験学習のひとつと言えます.そもそも,回転体は機械には不可欠な要素であり, 回転運動への理解は機械工学において重要な項目の一つです.ここでは,その基礎として 回転運動における慣性の法則と,慣性の大小を表わす慣性モーメントを説明します. (1) 慣性質量と慣性モーメント 外力が作用しないとき,静止している物体は静止し続け,運動している物体は等速直線 運動を続けようとする性質を慣性の法則 (law of inertia) もしくは,運動の第 1 法則(the first law of motion)といいます.直線運動では,物体は運動エネルギー 1 2 mv [J] 2 を持っています.この運動エネルギーは慣性の大小を左右しますが,エネルギーが大きい ほど,慣性が大きくなり,運動を止めにくくなります.運動エネルギーに含まれるのは質 量と速度ですが,質量 m [kg]は速度 v [m/s]に関係のない物体固有の値であり,慣性の大き さを表わす指標となるため,慣性質量 (inertial mass) [kg]と呼ばれます. 一方,物体が回転する場合も,物体は回転を続けようとする性質があり,直線運動の場 合と同じように慣性の法則が成立します.回転体は,回転の運動エネルギー(回転エネル ギー) 1 2 I [J] 2 を持っています.m は I,v は に対応しており,回転エネルギーと運動エネルギーは式が 類似していることがわかります.I は回転体の慣性の大きさを表す指標になり,慣性モーメ ント (moment of inertia) [kgm2]と呼ばれます. は角速度 [rad/s] で, を 2πで割ると回 転速度(回転数)[1/s]になります. 慣性質量は重量計で測定することができますが,慣性モーメントを直接測定する計測機 器はありません.慣性モーメントは,質量が同じでも物体の形状や回転軸の位置が異なる と,値が変わってしまうため,実際に回転させてトルクを測定し,理論的に値を求めるし かありません.工業力学や機械工学便覧には,代表例の形状に関して公式が記載されてい るので,回転体を設計する際の参考にすることができます.しかし,複雑な形状になると, 自分で計算しなければなりません.そのためには,慣性モーメントの理論を理解する必要 があります. (2) 慣性モーメントの定義 質量が無視できる半径 r のアームで固定回転軸に接続された質量 m の物体に対し,アー 埼玉工業大学 機械工学学習支援セミナー(小西克享) 慣性モーメント-2/6 ムと垂直な方向に力 F を加えると,物体は軸を中心として半径 r の円軌道上を回転し始め ます. I F r m 回転軸 このとき,物体の加速度を a とすると,ニュートンの運動の第 1 法則より,力と加速度の 関係は (1) F ma 2 と表わされます.一方,回転の角速度を [rad/s],角加速度を [rad/s ]とすると, (2) a r , , a r の関係から, F mr (3) となります.ところで,力 F に腕の長さ r を乗じた値 T Fr は,アームを回転するための トルクに他なりません.(3)式から, (4) T Fr mr 2 となります.ここで, I mr 2 とおくと, T I (5) (6) と表記することができます.この I が慣性モーメントとよばれるものです. 次に,物体が複数あり,一体となって回転する場合を考えます. I m2 F1 r2 r1 F2 m1 回転軸 トルクは,それぞれの物体を回転するのに必要なトルクの合計になるので n n n 2 2 T Fi ri mi ri mi ri I i 1 i 1 i 1 (7) 埼玉工業大学 機械工学学習支援セミナー(小西克享) 慣性モーメント-3/6 となり,慣性モーメントは n I mi ri 2 (8) i 1 と表わされます.物体が一つ一つ分かれておらず,連続した形の物体の慣性モーメント計 算する場合,合計を求める方法では物体を無数の物体に分割する必要があり,式は I mi ri 2 (9) i 1 と無限個の合計となるため計算は容易ではありません.この場合,次のようにΣ記号を積 分記号に置き換える必要があります. I r 2 dm (10) 円盤を例に,具体的な計算をしてみましょう. dr R R r 回転中心 回転軸 引き延ばすと 円盤を上から見た状態 円盤(半径 R,厚さ h)の回転中心から,半径 r の位置に微小な幅 dr のリングを考えま す.リングを伸ばすと,長さ 2r ,幅 dr テープ状となるので,このリングの微小重量 dm は,円盤の密度を [kg/m2] とすると (11) dm 2r dr h 2hrdr となります.(11)式を(10)式に代入すると I r 2 dm r 2 2hrdr 2h r 3 dr (12) となり,質量による積分を半径による積分に置き換えることができます.積分範囲は円盤 の中心 r 0 から円盤の半径 r R までです.したがって,定積分を行うと, R r4 R4 1 I 2h r dr 2h 2h hR 4 0 4 2 4 0 R 3 (13) さらに,円盤の質量を M [kg]とすると,密度は M R 2 h (14) 埼玉工業大学 機械工学学習支援セミナー(小西克享) 慣性モーメント-4/6 なので,これを(13)式に代入すると 1 M MR 2 4 I hR 2 R 2 h 2 慣性モーメントを (15) (16) I Mk 2 とおいたとき,k を回転半径 (radius of gyration) [m]と言います.円盤の場合,(15)式との比 較から I R (17) M 2 となります.円盤の場合,回転半径 k は円盤の半径 R に一致するわけではありませんが, k R に比例していることを理解しておく必要があります. (3) 慣性モーメントの定理 ① 平行軸の定理 重心 G から d 離れた,z 軸に平行な回転軸 w を考えます. w z I R d r G x x y y w 軸回りの慣性モーメントを I とすると, x I r 2 dm 2 d x 2 y 2 dm y 2 2dx d 2 dm r x G 2 2 2dx d 2 y 2 dm 2dx d 2 dm rG dm 2d xdm d 2 dm 2 (18) 右辺第 1 項は,物体の重心回りの慣性モーメント I G に等しく, I G rG dm 2 (19) となる.次に,右辺第 2 項の積分は,重心回りのモーメントを M G に等しく,モーメント のバランスから M G xdm 0 となる.右辺第 3 項の積分は,全質量 M に等しい. (20) 埼玉工業大学 機械工学学習支援セミナー(小西克享) M dm 慣性モーメント-5/6 (21) したがって,(18)式は I IG d 2M (22) となります.これを平行軸の定理と言います. ② 直交軸の定理 回転軸として,図のように,x, y, z の直交する 3 つの軸を考えます. z R x y x r y 図より r 2 x2 y2 の関係があり,両辺に dm を掛けると r 2 dm x 2 dm y 2 dm (23) (24) さらに,両辺を積分すると r 2 dm x 2 dm y 2 dm (25) 各項は,3 つの軸の慣性モーメント I x , I y , I z に等しいので,次の関係が存在します. Iz Ix Iy (26) この関係を,直交軸の定理と言います. ここで, I z は円盤の面に垂直な軸(回転対称軸)回りの慣性モーメントであり,極慣性モ ーメント (polar moment of inertia)と呼ばれます. (4) 慣性モーメントとコマ回し 回転速度が同じ場合,慣性モーメントの大きな回転体の方が静止状態から回転し始める 際の起動トルク注が大きくなり,同時に蓄えられる回転エネルギーも大きくなって,回転を 止めにくくなります.慣性モーメントを大きくするには,(16)式から分かるように,質量 か回転半径を増やせばよいわけですが,質量より,2 乗に比例する回転半径を増やす方が 埼玉工業大学 機械工学学習支援セミナー(小西克享) 慣性モーメント-6/6 効果的と言えます.すなわち,同じ質量なら,円盤の半径を大きくする方が良いことにな ります.このことは,コマ回しの場合も,慣性モーメントの大きいものを選ぶ方が,回転 の勢いを増し,回転時間を長くできることを意味しています.ただし,あまり大きくなり すぎると,起動トルクが大きくなり過ぎて,手では十分な回転速度が得られないため,限 界は存在します. 注:起動トルクは,静止時から物体が回転し始める際に必要なトルクです. http://www.sit.ac.jp/user/konishi/JPN/L_Support/SupportPDF/Moment_of_inertia.pdf Copyright ⓒ 2009, 2013 小西克享, All Rights Reserved. 個人的な学習の目的以外での使用,転載,配布等はできません. お願い: 本資料は,埼玉工業大学在学生の学習を支援することを目的として公開しています.本資料 の内容に関する本学在学生以外からのご質問・ご要望にはお応えできません.
© Copyright 2026 Paperzz