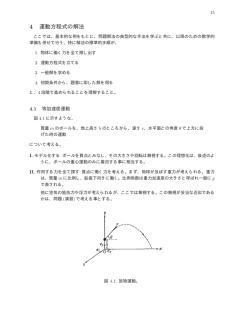
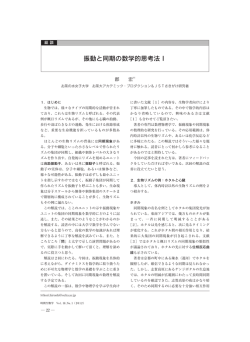
定数係数 2 階線型微分方程式 2009/05/29 by 矢崎 本講ではニュートンの運動方程式を用いた微分方程式の作成とその解法を講述 し、最終的には、定数係数 2 階線型微分方程式の解き方を紹介する。まず、ベク トル値関数について定義しておく。 §1. ベクトル値関数 いま、2 つの関数 f1 , f2 があり、実数の入力 x に対して、 y1 = f1 (x), y2 = f1 (x) という実数値をそれぞれ出力したとする。これらを縦に並べてベクトル表示す れば、 ( ) y1 y2 横でもよい: ( ) f1 (x) = f2 (x) (y1 , y2 ) = (f1 (x), f2 (x)) となる。ここで、ベクトル ( ) ( ) y1 f1 (x) , f (x) = y= y2 f2 (x) 横ベクトル(行ベクトル)な らば: y = (y1 , y2 ), f (x) = (f1 (x), f2 (x)) を導入すれば、 y = f (x) と書ける。このとき、f を 1 変数ベクトル値関数と呼ぶ。同様に、n 変数ベクト ル値関数は、 y = f (x); x y f (x) 1 1 1 x y f (x) 2 2 2 x = . , y = . , f (x) = . .. .. .. xn ym fm (x) と定義される。 本講でよく用いられるベクトル値関数は、時間変数が t で、2 次元や 3 次元の 位置ベクトルに値を取るベクトル値関数 ( ) x(t) r(t) = , y(t) ( ) x1 (t) x(t) = , x2 (t) などである。 1 x(t) r(t) = y(t) , z(t) x1 (t) x(t) = x2 (t) x3 (t) §2. ニュートンの運動方程式 空間内を時々刻々と動き回る物体 P があるとする。物体 P の時刻 t での位置ベ x1 (t) 3 クトルを x(t) = x2 (t) ∈ R とする。このとき、速度ベクトル v(t) は、 x3 (t) ẋ1 (t) v(t) = ẋ(t) = ẋ2 (t) ẋ3 (t) で与えられる。ここで、 ẋ(t) = dx(t) = x′ (t) dt はどれも同じ意味で時間微分した導関数を表す。速度ベクトルの大きさ |v(t)| を 速さと呼ぶ。速度ベクトルの時間微分を加速度ベクトル a(t) という: ẍ1 (t) a(t) = v̇(t) = ẍ2 (t) . ẍ3 (t) ニュートンはある時刻 t で x(t) にある質量 m の物体 P の運動は以下の運動方 程式に従うと発見した。 ma = f . f 1 ここで、f = f2 は外力ベクトルである。外力として、例えば、重力、摩擦力、 f3 抵抗力などがある。 §3. 等速運動 x 軸上を質量 m の物体 P が一定速度 v0 > 0 で運動しているとする。すなわち、 物体 P の位置を x(t) とすれば、ẋ(t) = v0 である。いま、ある時刻(簡単のため t = 0 とする)から ∆t 時間だけ、物体 P にその運動する方向と反対向きに力 F0 を加えて、物体 P の速度を零にすることを試みた。すなわち、 ẋ(t) = v0 (t ≤ 0), mẍ(t) = −F0 (0 < t < ∆t), とする。第 2 式を [0, t] で積分すると、 ẋ(t) = ẋ(0) − F0 t m を得る。これより、 ẋ(∆t) = ẋ(0) − F0 F0 ∆t = v0 − ∆t = 0. m m すなわち、時刻 ∆t で、物体 P の速度を零にするには、 F0 = mv0 ∆t の力が必要である。 2 ẋ(∆t) = 0 左からニュートン、ライプニ ッツ、ラグランジュの用いた 記号。 √ |v(t)| = ẋ1 (t)2 + ẋ2 (t)2 + ẋ3 (t)2 問題 1. 上の考察より、「車は急に止まれない」ことを説明せよ。 問題 2. 単位円周上を物体が反時計回りに一定の角速度 ω0 > 0 で回転運動してい るとする。このとき、速度ベクトルは接線方向で、その大きさは ω0 に等しく、ま た、加速度ベクトルは動径と反対方向(内向き法線方向)であり、その大きさは ω02 に等しくなることを示せ。 §4. 落下運動 外力が重力のみの場合、質量 m の物体の鉛直方向の運動方程式は、 鉛直上向きを y の正の方向と する。 mÿ = −mg である。 問題 3. 時刻 t = 0 での初期位置を y(0) = 0, 初速度を ẏ(0) = v0 > 0 としたと き、物体が最高点に到達するまでの時間とそのときの位置を求めよ。 物体が運動するとき、外力として重力だけでなく空気抵抗を加わえた方が現実 的であろう。一般に、半径 r の球形の物体が液体や気体中を「遅い速さ」で動く ときに、その抵抗力(摩擦力)は、 f = −6πηrẏ のように半径と速度の積に比例することが知られている(ストークスの抵抗法則)。 ここで、η は粘性係数と呼ばれる。上向きの速度 ẏ > 0 の場合、摩擦力 f は負(下 向き)で、下向きの速度 ẏ < 0 の場合、摩擦力 f は正(上向き)であることに注 意せよ。結局、運動方程式は、 mÿ = −mg − 6πηrẏ となる。 問題 4. (液体中の落下) 液体中を質量 m, 半径 r の球形物体が落下する場合の運 動方程式を、浮力を考慮して導け。ただし、浮力は重力と逆向きで、その物体と 同じ体積の液体の重さである。また、液体の密度を ρ, 粘性係数を η とせよ。 問題 5. (放物運動) 物体に働く外力が重力のみとする。いま、初速度 v0 で地面に ( ) ẋ(0) 対して角度 θ で物体が投げられたとする。すなわち、初速度ベクトルは = ẏ(0) ( ) cos θ v0 である。また、初期位置を x(0) = y(0) = 0 とする。このとき、運動 sin θ 方程式 mÿ = −mg, mẍ = 0 を解いて、物体が放物運動することを示せ。また、物体の最高の高さを求めよ。 更に、物体が飛んでいく距離が最大となる角度 θ を求めよ。 3 正 確 に は 、レ イ ノ ル ズ Reynolds 数と呼ばれるある 無次元量が小さい運動。レイ ノルズ数は、流体の状態を表 現する指標としてよく使わ れる。 George Gabriel Stokes 1819.8.13 [アイルランド] – 1903.2.1 [英]. 粘性流体の流 体力学の基礎を作った [1]。 §5. バネの振動 図 1 のようにばねの先端に質量 m の物体がとりつけられている。 u(t) 図 1. ばねの振動。 時刻 t での変位を u(t) とする。床は滑らかである(摩擦がない)としたとき、 ばねの復元力は変位に比例する f = −ku(t) ことが知られている(フックの法則)。k をばね定数という。ばねの質量を無視す れば、運動方程式は、 mü = −ku となる。また、速度に比例した摩擦力が働く場合は、運動方程式は、 mü = −ku − γ u̇ となる(γ は比例定数)。 §6. マルサスの法則の拡張 マルサスの法則とは、ある生物の個体数の増殖率はその時点での個体数に比例 するという法則であった。例えば、 生物種 時刻 t での個体数 増殖率 I u(t) a II v(t) d のようなデータが得られている場合、マルサスの法則にしたがうとすると、生物 種 I, II の個体数は、それぞれ u̇ = au, v̇ = dv という微分方程式に支配される。 2 種の生物が影響しあっている場合、次のようなモデル微分方程式が考えられ る(a, b, c, d は定数)。 u̇ = au + bv = au + bv v̇ = dv + cu = cu + dv 第 1 式より、bv = u̇ − au であり、これと第 2 式を b 倍したものを比較して、 ü − (a + d)u̇ + (ad − bc)u = 0 を得る。 問題 6. v も同じ方程式を満たすことを確認せよ。 4 Robert Hooke 1635.7.18 – 1703.3.3. 広範 分野に貢献のあるイギリスの 科学者 [2]。 §7. 振り子の運動 図 2 のように、鉛直下向きに x 軸、水平方向に y 軸をとった xy 座標平面を用 意する。 O y l θ P x 図 2. 振り子の運動する xy 座標平面。 原点 O から質量 m の錘を紐で吊るす。錘の中心を点 P とし、質量はそこに集中 しているものとし、紐の重さは考えない。紐は伸縮もたわみもせず、その長さを −→ OP = l とする。ベクトル OP と x 軸のなす角度を θ とし、反時計回りをその正の ( ) −→ cos θ 方向とする。よって、x = OP とすると、その成分は x = l となる。点 sin θ P にかかる力を F とすると、運動方程式は、 mẍ = F −→ である。OP 方向の単位ベクトルを n = t = ( ) − sin θ cos θ ( ) cos θ , それに直交するベクトルを sin θ とおく。点 P の軌跡は円弧であるので、n と t はそれぞれ点 P における円の 法線ベクトルと接線ベクトルである。これより、x = ln, ṅ = θ̇t, ṫ = −θ̇n に注意すると、速度ベクトル ẋ と加速度ベクトル ẍ は、それぞれ ẋ = lθ̇t ẍ = −lθ̇2 n + lθ̈t と計算される。 点 P にかかる力を紐の張力 fT = −T n と外力 f に分けて F = fT + f と分解 ( ) 1 する。いま外力が重力 f = mg のみであると仮定する。運動方程式の両辺 0 と n との内積を取ると mẍ · n = −T + f · n = −T + mg cos θ となるので、張力 T = m(g cos θ + lθ̇2 ) を得る1) 。また、t との内積を取ると mẍ · t = f · t = −mg sin θ |θ| は最大値に近く、|θ̇| ∼ 0 であり、このとき T は 非常に小さい(ふわっとした感覚)。一方、最下点付近では |θ| ∼ 0 で、|θ̇| は最大値に近いので、大 きな T で引っ張られていると感じる。 1) ブランコに乗っているとき、最高点付近では 5 法線 normal, 接線 tangent となる。力の t 方向成分の釣り合いの式(運動方程式) mlθ̈ = −mg sin θ を得る。残念ながらこの方程式を初等解法で解くことはできない。が、|θ| が小さ いとき、sin θ ∼ θ であるから、近似的に、 mlθ̈ = −mgθ が成り立つ。 §8. 1 階線形微分方程式の解き方 前節までに登場した運動方程式は、 y ′′ (x) + ay ′ (x) + by(x) = c (a, b, c は定数) の形にまとめられる。この方程式 —2 階線形微分方程式— は完全に解けること が知られている。その解法は次節で説明するが、その準備として、次の正規型微 分方程式 —1 階線形微分方程式— の解法を紹介する: y ′ (x) = p(x)y(x) + q(x). ここで、p, q は与えられた関数である。 まずは簡単な場合から解いてみよう。q(x) ≡ 0 の場合、方程式は変数分離型 y ′ (x) = p(x)y(x) となり、 y(x) = Cer(x) , r′ (x) = p(x) q(x) ≡ 0 は q(x) はどんな x の値を代入しても「恒等的」 に零であるという意味である。 つまり、全ての x に対して q(x) = 0 が成り立つ。 (C は任意定数) と解くことができる。 問題 7. これを示せ。 次に、q(x) ̸≡ 0 の場合は、次のように C を微分可能な x の関数 C(x) と置き換 えた解 y(x) = C(x)er(x) , r′ (x) = p(x) を想定し、C(x) の満たすべき条件を調べる。方程式に代入すると、 y ′ (x) = C ′ (x)er(x) + p(x)y(x). これが、p(x)y(x) + q(x) に等しいのだから、 C ′ (x) = q(x)e−r(x) . こうして、一般解 y(x) = C(x)er(x) , C ′ (x) = q(x)e−r(x) , 6 r′ (x) = p(x) q(x) ̸≡ 0 は恒等的に零ではな いという意味である。つまり、 ある x に対して q(x) ̸= 0 が 成り立つ。 を得る。以上の解法を定数変化法という2) 。 例. y ′ (x) = y(x) + x を解く。y ′ = y の一般解は、y(x) = Cex である。定数 C を C(x) とした解 y(x) = C(x)ex を想定し、これを方程式に代入すると、 y ′ (x) = y(x) + C ′ (x)ex . 故に、C ′ (x) = xe−x . よって、 C(x) = −(x + 1)e−x + A (A は任意定数) これより、一般解 y(x) = Cex − x − 1 (C は任意定数) を得る。 注. ここで、Cex は y ′ = y の一般解、−x − 1 は y ′ = y + x の特解となっている。 一般に、y ′ (x) = p(x)y(x) + q(x) の一般解は、y ′ (x) = p(x)y(x) の一般解 y0 と y ′ (x) = p(x)y(x) + q(x) の特解 y∗ の和で表される。実際、y(x) = y0 (x) + y∗ (x) とおくと、 y ′ (x) = y0′ (x) + y∗′ (x) = p(x)y0 (x) + p(x)y∗ (x) + q(x) = p(x)(y0 (x) + y∗ (x)) + q(x) = p(x)y(x) + q(x) が成り立つ。 注. 1 階線形微分方程式の「線形」とは、方程式が y と y ′ の 1 次式であるとい う意味である。1 次と線形(線型)は同義語で、英語では linear という。linear は straight line(直線)に由来しており、正比例の関係を拡張した概念である。 次節で扱う 2 階線形微分方程式は、2 階の微分方程式が未知関数 y とその導関数 y ′ , y ′′ について 1 次式になっている。より一般に、n 階の微分方程式が未知関数 y と y, y ′ , y ′′ , . . . , y (n) の 1 次式となっているものを n 階線形微分方程式という。 §9. 2 階線形微分方程式の解き方 2 階線形微分方程式 ⃝ 1 ······ y ′′ (x) + ay ′ (x) + by(x) = c (a, b, c は定数) の一般解は、⃝ 1 で c = 0 とした方程式 ⃝ 2 ······ y ′′ (x) + ay ′ (x) + by(x) = 0 の一般解 y0 (x) と⃝ 1 の特解 y∗ (x) の和で表される。実際、y = y0 + y∗ とおくと、 y ′′ + ay ′ + by = (y0 + y∗ )′′ + a(y0 + y∗ )′ + b(y0 + y∗ ) = (y0′′ + ay0′ + by0 ) + (y∗′′ + ay∗′ + by∗ ) = 0 + c = c 2) 定数 C を C(x) のように変化させて解を見つけた。 7 1 次と線形は同じといっても、 1 階 1 次微分方程式とはいわ ない。1 階導関数 y ′ を 1 次 導関数とも呼ぶからである。1 次の微分方程式といった場合 は、最高次数の導関数が y ′ で ある微分方程式のことを指す。 ⃝ 1 の特解はすぐ見つかる。例えば、b ̸= 0 ならば y∗ = c/b は⃝ 1 を満たすので特 解である。b = 0 のときは、a ̸= 0 ならば y∗ = cx/a, a = 0 ならば y∗ = cx2 /2 な どの特解が見つかる。 さて、⃝ 2 の一般解を求めよう。発見的ではあるが、y = eλx を⃝ 2 に代入すると、 (λ2 + aλ + b)eλx = 0. 故に、2 次方程式 ⃝ 3 ······ λ2 + aλ + b = 0 の根 λ が見つかったならば、eλx は⃝ 2 の解である。この⃝ 3 を⃝ 2 の特性方程式と呼ぶ。 特性方程式⃝ 3 の根の形態は 3 通りある。 (1) 異なる 2 つの実根の場合。 これらを α, β とおくと、⃝ 3は (λ − α)(λ − β) = 0 と因数分解され、解と係数の関係から、 a = −(α + β), b = αβ となる。いま、D = y ′ − αy = d とおいて、 dx d を 1 階の微分作用 dx 素と呼ぶ。 D = d y − αy = Dy − αy = (D − α)y dx と書くことにすると、 D(D − α)y = (D − α)Dy −β(D − α)y = (D − α)(−β)y などから、 y ′′ + ay ′ + by = y ′′ − (α + β)y ′ + αβy = (D2 − (α + β)D + αβ)y = (D − α)(D − β)y = 0 D2 = が成り立つ。 これより、u(x) = (D − β)y(x) とおくと、 (D − α)u = u′ − αu = 0 (D − β)y = y ′ − βy = u を解けばよいことがわかる。 第 1 式の一般解は、 u(x) = Ceαx であるので、これを第 2 式に代入して、 y ′ = βy + Ceαx 8 用素。 d2 は 2 階の微分作 dx2 を得る。これに y = z(x)eβx を代入して、 定数変化法! z ′ (x) = Ce(α−β)x すなわち、 z(x) = C e e(α−β)x + C α−β がわかる。よって、一般解 y(x) = C1 eαx + C2 eβx を得る。 (2) 共役複素根の場合。 それらを α, β とおくと、解の形は (1) と同じで y(x) = C1 eαx + C2 eβx である。ただし、α = µ + iν, β = µ − ν, C1 = a + bi, C2 = c + di は全て複素数 であり、y(x) は複素解である。以下のように実数化しよう。これらの複素定数を 全て代入して、オイラーの公式を用いて整理すると、 y = eµx ((a + bi)(cos νx + i sin νx) + (c + di)(cos νx − i sin νx)) = eµx ((a + c) cos νx + (−b + d) sin νx + i ((b + d) cos νx + (a − c) sin νx)) となる。ここで、a = c, b = −d と選び、C1 = a + c, C2 = −b + d と改めておけ ば、実数の一般解 y(x) = eµx (C1 cos νx + C2 sin νx) を得る。 (3) 実重根の場合。 これを α とおくと、特性方程式は、 (λ − α)2 = 0 である。これより、 (D − α)u = 0 (D − α)y = u を解けばよい。第 1 式の一般解 u = Ceαx を第 2 式に代入して、 y ′ = αy + Ceαx を得る。これに y = z(x)eαx を代入して、 y ′ = αy + z ′ eαx e これより、一般解 となるので、z ′ = C より、z = Cx + C. y(x) = (C1 x + C2 )eαx を得る。 9 定数変化法! §10. いままでの例に適用 いままでの例を解いてみよう。 問題 8. (§4) 抵抗を考慮した物体の落下運動の運動方程式 mÿ = −mg − 6πηrẏ の一般解は c 6πηr y(t) = C1 + C2 e−at + t, a = , c = −g a m であることを示せ。 また、初期位置を y(0) = y0 > 0, 初速度を ẏ(0) = v0 > 0 とおいたとき、C1 , C2 を決定せよ。 初速度が正 v0 > 0 なので、ある時刻 t0 > 0 で ẏ(t0 ) = 0, すなわち物体は最高 点に到達する。この時刻 t0 の値と y(t0 ) の値を求めよ。 注意 上の問題の仮定のもとで、十分に時間が経ったとき、速度 ẏ は c に近づ a く。この値を終端速度という。 問題 9. (§5) 速度に比例した摩擦力が働く場合のバネの振動を表す運動方程式 mü = −ku − γ u̇ の一般解を求め、γ 2 < 4mk のときは周期運動、γ 2 ≥ 4mk のときは減衰運動す ることを示せ。 問題 10. (§6) マルサスの法則を一般化した運動方程式 ü − (a + d)u̇ + (ad − bc)u = 0 の一般解が周期的になるための条件を示し、その意味を考察せよ。 問題 11. (§7) 振れ幅が小さいときの振り子の運動を近似的に表す運動方程式 mlθ̈ = −mgθ を解き、その周期が 2π √ l であることを確認せよ。 g √ l は、おもりの質量や振り子の振幅に無関係である。つまり、 g 振り子の紐の長さが同じならば、おもりが重くても、軽くても、振幅が大きくて 注意 周期 2π も、小さくても、周期は同じである、ことを示している。これを振り子の等時性 と呼び、ガリレオの発見といわれている。 参考文献 [1] Stokes: The MacTutor History of Mathematics archive http://turnbull.mcs.st-and.ac.uk/history/Mathematicians/Stokes.html [2] Hooke: The MacTutor History of Mathematics archive http://turnbull.mcs.st-and.ac.uk/history/Mathematicians/Hooke.html 10
© Copyright 2026 Paperzz