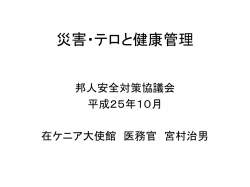
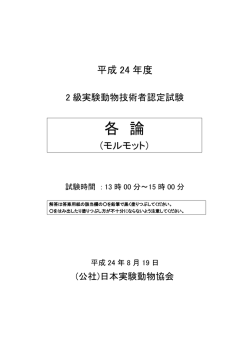
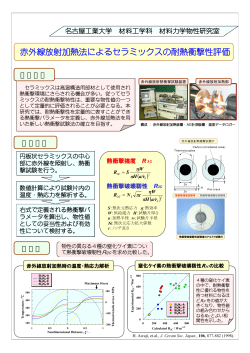
2-1 2.粘弾性(viscoelasticity) 2-1.粘弾性 材料は外力を受けると弾性変形するが、さらに時間とともに粘性流動的な変形を行う場合 を粘弾性という。 2-1-1.Maxwell model 下図のように固体を、バネ定数μの線形バネと、粘性係数ηを有するダッシュポットが 直列に並んでいるものと仮定する。 Linear spring Dash pot 図2-1.Maxwell model バネでは荷重に比例した変形が瞬間的に生じるから、応力と歪の関係は、 εs = σ µ (2-1) 2-2 となり、歪速度に直すと、 εs = σ µ (2-2) となる。一方、ダッシュポットは応力に比例した粘性流動をするから、歪速度は、 εd = σ η (2-3) である。図から明らかなように、材料の伸びは、バネの伸びととダッシュポットの伸びを 足し合わせたものであるから、材料全体の歪速度はこれらの歪速度を足し合わせたものに なる。 ε = εd + εs = σ + σ µ η (2-4) (1)一定の応力を付加した場合の材料の歪 いま時刻t=toにおいて一定の応力soを付加したものとする。このとき、バネは応力 を付加した瞬間に伸びることになるから、バネの歪は(2-1)式より、 εd = σ o H t - t o µ (2-5) となる。ここで、H(t-to)はステップ関数である。一方、ダッシュポットの伸びは、 εs = εs dt = σo dt = σo t - t H t - t o o η η (2-6) 従って、一定応力を付加したときの材料の歪は以下のようになる。 ε = σo 1 + t - t o H t - t o µ η (2)一定歪を付加したときの応力の減衰 (2-7) 2-3 次に時刻t=toにおいて、一定の歪eoを与えたものとする。このとき、(2-4)式 は、 σ+ σ=0 µ η (2-8) となり、これを解くと、 µ t - to H t - to η = σo exp - t - t o H t - t o τ σ = µε o exp - (2-9) となり、時間とともに応力が減少していくことがわかる。この減少のことを応力緩和 (stress relaxation)と言い、(2-9)式において τ= η µ (2-10) は応力が減衰する緩和時間(relaxation time)を表す。 stress strain σo εs εo εd strain stress εo σo to time to (1) constant stress (2) constant strain 図2-2.Maxwell modelにおける歪と応力の時間変化 time 2-4 2-1-2.Voigt model Voigt modelでは、図2-3のように固体の粘弾性挙動を線形バネとダッシュポットが 荷重軸に対して並列と仮定する。このモデルでは、荷重を並列なバネとダッシュポットが 受け持つことになり、以下の式が成り立つ。 σ = µε + ηε (2-11) 図2-3.Voigt model (1)応力一定の場合 (2-11)式において、左辺=soとして解くと、歪は、 ε = σo 1 - exp - t - t o H t - t o µ τ (2-12) となる。t=無限大では、 ε = σo µ (2-13) となり、Voigtモデルにおいては、追いつけなかった歪は最終的にバネの歪によってまか なわれることになり、時間とともにバネが荷重を受け持つようになることがわかる。 2-5 (2)歪一定の場合 σ = εo ηδ t - t o + µH t - t o (2-14) となる。ここで、 δ t - t o = 1 , t = to δ t - t o = 0 , t ≠ to (2-15) である。時刻toにおいて急激に付加した歪に対応して、瞬間的に応力が増加するがその 後はバネの性質をあらわすことがわかる。 stress strain σo µ εs µεo εd strain stress εo σo to time (1) constant stress to time (2) constant strain 図2-4.Voigt modelにおける応力と歪の時間変化 2-1-3.標準線形モデル 現実の材料では、MaxwellならびにVoigtモデルでは、粘弾性挙動がうまく表すことが できないことが示されており、図2-5に示す標準線形モデルを用いる。さらに一般的な 模型は、図2-5に次第に多くの要素を加えることによって構成できる。 2-6 channel 1 channel 2 µ2 µ1 η 図2-5.標準線形模型 図2-5のように、固体を並列な二つのチャンネルに分けて考える。 チャンネル1における応力と歪には以下の関係が成り立つ。 σ1 = µ 1ε1 , σ1 = µ 1ε1 (2-16) チャンネル2における応力と歪に関しては、 ε2 = σ 2 + σ 2 µ η (2-17) となる。ここで、チャンネル1と2の歪は材料全体の歪に等しいから、 ε = ε1 = ε2 , ε = ε1 = ε2 (2-18) また、応力については材料全体にかかる荷重をチャンネル1と2で受け持っているから、 2-7 σ = σ1 + σ2 , σ = σ1 + σ2 (2-19) である。従って、チャンネル2に関する(2-17)式に(2-18)並びに(2-19)式を代 入すると、 ε = ε2 = σ 2 + σ 2 = σ - σ 1 + σ - σ 1 µ2 η µ2 η = σ + σ - σ1 - σ1 µ2 η µ2 η µ µ = σ + σ - 1 σ1 - 1 σ1 µ2 η µ2 µ1 η µ1 µ µ = σ + σ - 1 ε1 - 1 ε1 µ2 η µ2 η µ µ = σ + σ - 1 ε- 1 ε µ2 η µ2 η (2-20) となるから、 σ + σ = µ1 ε + µ1 + µ2 ε η µ2 η µ2 (2-21) あるいは、両辺にηを掛けて、 σ+ η µ + µ2 η σ = µ1 ε + 1 ε µ2 µ1 µ2 (2-23) と整理できる。ここで、 τε = η µ + µ2 η , τσ = 1 , E R = µ1 µ2 µ1 µ2 (2-24) とおくと、(2-23)式で表される標準線形モデルの粘弾性挙動は、 σ + τε σ = E R ε + τσ ε (2-25) 2-8 と簡潔に表される。(2-25)式をLaplace変換すると、 Σs = L σt , E s = L εt (2-26) として、 1 + τεs Σ s = E R 1 + τσ E s (2-27) となる。 (1)応力一定の場合 応力一定の場合は、 σ t = σo (2-28) であるから、 Σ s =L σ(t) = σso (2-29) より、 1 + τε σ o = E R 1 + τσ E s s ∴E s = σo τε 1 + 1/τε ER τσ s + 1/τσ s (2-30) を得る。これを逆Laplace変換すると、応力一定の時の歪の緩和の式が得られる。 ε = σo 1 - 1 - τε exp - t τσ τσ ER (2-31) これより、τsは一定応力のときの歪の緩和時間であり、t=∞ではダッシュポットは完 全に緩和され、応力ー歪の関係は定数ERで特性づけられるバネの式となる。従って、ER は緩和弾性係数(relaxed elastic modulus)という。 (2)歪一定の場合 2-9 応力一定の場合と同じようにして、以下の式が得られる。 σ = E Rεo 1 - 1 - τε exp - t τσ τε (2-32) この式から、τeは歪一定のときの応力の緩和時間を表すことがわかる。 stress strain stress strain σo εo time (1) constant stress time (2) constant strain 図2-6.標準線形模型の応力と歪の緩和 2-2.材料の内部摩擦(internal friction)と減衰(damping) 2-1節では、粘弾性挙動を静的に扱った。このような挙動はたとえば、高分子材料が 粘性を示す温度で、一定荷重や一定変位を与えたときに生じる。また、金属材料でも高温 で、変位まで変形させた後、その変位のままに保っておくと応力が緩和する。このような 場合には、図2-7に示すように、応力を付加していっても変形が追いつかず、また除去 していってゼロになる間にも変形が追いつかない。そして、図2-7の斜線部で示される 面積が材料内で散逸されるエネルギーになる。このような減少は、材料内に変形の抵抗と な 2-10 stress ε1 σ1 ε strain 2 δ 図2-7.Elastic hysteresis loop 図2-8.応力に対する歪の応答 る摩擦力が作用していると考えることができ、斜線部の面積は材料内の摩擦に費やされた エネルギーととらえることができる。 この面積は非常に小さいが、応力変動が高振動で ある場合には無視できなくなってくる。工学的な立場から言えば、図2-7の斜線部で示 されたヒステリシスループは、繰り返し応力下で発生する熱ならびに振動に対する減衰能 を特徴づける。 2-2-1.tanδ:位相角の遅れ 外部から周期的な応力を作用させた場合を考える。このとき、外部からの周期的な付加応 力は、次のように書ける。 σ = σ1 eiωt (2-34) この応力に歪は遅れて応答するので、歪を以下のように表す(図2-8)。 ε = ε1 - iε2 eiωt (2-35) このとき、次式のように複素弾性率、 M = σ1 = σ1 ε ε1 - iε2 (2-36) を定義できる。ここで、固体では歪の遅れが非常に小さい(e1>>e1)であることを考慮 2-11 すると、 M= σ 1 ≈ σ 1 1 + i ε2 = M 1 + i ε2 ε1 ε1 ε1 - iε2 ε1 (2-37) となる。ここで、 M = σ1 ε1 (2-38) は実測する動的弾性率である。一方図2-8より、歪の遅れを表す位相角のずれδは、 tanδ = ε2 , or δ ≈ ε2 ( when ε2 <<ε1 ) ε1 ε1 (2-39) となるので、(2-37)式は結局 M = M 1 + i tanδ ≈ M 1 + i δ (2-40) を得る。すなわち、位相角の遅れは、 tanδ ≈ δ = Im M Re M (2-41) で表される。 2-2-2.Q-1:共振曲線の半価幅 位相の送れδは非常に小さい(δ<<1)ので、直接測定が困難であり、一般には間接的 な方法で内部摩擦が測定される。その一つは試料を強制振動させて、その共振曲線の鋭さ から求める方法である。 今、試料は慣性体に取りつけられており、試料自体の慣性を無視でき、試料全体が一様 に変形する場合を考える。慣性体の運動方程式は、慣性体の変位をθ、慣性モーメントを I、試料が慣性体に及ぼす力をFs、外力が慣性体に及ぼす力をFaとすると、 2 I d θ2 = F s + F a dt (2-42) 2-12 となる。試料は外力に対して変形が遅れるので、Fsに関して次式が成り立つ。 Fs = - kθ , k = k 1 + iδ (2-43) ここで、kは複素バネ定数であり、kは実測される動的なバネ定数である。外から与える 強制振動は、 Fa = F o eiωt (2-44) となるので、(2-42)式は以下のように書き表せる。 2 I d θ2 = - kθ + F o eiωt dt (2-45) θ = θ o eiωt (2-46) ここで、 とおいて、(2-44)式に代入すると、 - Iω2θ 0 = - kθ o + F o (2-47) が得られる。これより、 Fo = Fo k - Iω2 k - Iω2 + ikδ Fo/I = k/I - ω2 + i k/I δ θ0 = (2-48) となり、 ωr2 = k I と置いて、 (2-49) 2-13 Fo/I ωr2 - ω2 + iωr2δ θ0 = = Fo/I 2 - ω2 - iω 2δ ω r r 2 ωr2 - ω2 2 + ωr4δ (2-50) となる。波の強度は振幅の2乗であるから、 θ0 2 Fo/I 2 = ωr2 - ω2 2 + ωr4δ2 (2-51) 2 θ - ω曲線を図9に示す。 0 となる。 θo 2 2 θo max 2 θo max 2 ωr ∆ω 共振が起るのは、ω 図2-9.共鳴曲線 = ωr のときであり、このとき最大の強度 ω 2-14 θ 0 2max = 2 Fo/I ωr4δ2 (2-52) が得られる。一方、強度は ω = ωr ± ∆ω 2 (2-53) で、最大値の半分になるから、強度比をとると、半価幅Δωは、 ωr4δ2 1= 2 ωr2 - ωr ± ∆ω/2 2 2 + ωr4δ2 (2-54) で与えられる。これを解くと以下のような半価幅と位相の遅れに関する式が得られ、強制 振動の共鳴曲線の形から内部摩擦による変形の遅れがもとまる。 Q-1 = ∆ω = δ ωr (2-55) 2-2-3.減衰能(damping capacity) 工業的には1サイクル当たりの振動エネルギーの減少の割合ΔW/Wで内部摩擦の割合 を表すこともある。 ∆W = 1 cycle σdε = 2π ω 1 cycle σ dε dt dt (2-56) (2-34)ならびに(2-35)式から、物理的に有意な量として実部をとると、 σ = σo cos ωt dε = ω ε2 cos ωt - ε1 sin ωt dt である。これを(2-56)式に代入して積分すると、 (2-57) (2-58) 2-15 ε2 cos2ωt - ε1 cosωt sinωt dt W = 2πσo 1 cycle = πσoε2 = πσoεo sinδ (2-59) を得る。ここで、 εo = ε12 + ε22 (2-60) である。一方、振動のエネルギーWは、δが小さいときには、 W = σoεo 2 (2-61) としてよいから、 ∆W = 2π sinδ ≈ 2πδ W (2-62) となって振動の減衰能は位相の遅れに比例することがわかる。 2-2-4.Δ:対数減衰率 (logarithmic derement) 2-2-2節ならびに2-2-3節では強制振動の場合であるが、自由振動の減衰からも内 部摩擦が求められる。(2-42)式でFa=0とおくと、 2 I d θ2 = - kθ dt (2-63) となる。これに θ = θ o eiωt (2-64) を代入すると、 I ω2= k となる。 (2-65) 2-16 ω = ω a + ib (2-66) とおくと、未知の定数a、bは(2-65)式より、 ω2 a2 - b 2 - 2iab = k 1 +iδ I (2-67) が恒等的を満たさなければならない。従って、 a2 = 1 1 + 1 + δ 2 ≈ 1 2 2 2 2 1 δ b = -1 + 1 + δ ≈ 2 4 (2-68) となり、(2-66)式は、 ω = ω 1 +i δ , ω2 = I 2 k (2-69) となる。よって、(2-64)式は、 θ = θo e- ωδ t 2 e iωt (2-70) となるから、測定される実部は、 θ = θo e- ωδ t 2 cos ωt (2-71) で表される。今、n回目の振幅をθnとし、ωt=2πnとおくと、 θ n = θ o e- nπδ (2-72) となる。あるいは、 1 ln θ o = πδ = ∆ n θn (2-73) 2-17 となる。一回の振動の間の振幅の減衰をとると、 ln θ n = δ θ n+1 (2-74) は明か。 2-2-5.α:進行波の減衰係数(attenuation coefficient) 材料中をx方向に進行している波の振幅(変位)は以下の式で与えられる。 u = u o cos ω t - xv (2-75) ここで、λは波の波長である。この波が減衰するときには、減衰係数αを用いて以下のよ うに書き表せる。 u = u oexp - αx cos ω t - xv (2-76) 波が1波長進んだときのエネルギー損失は、 ∆W u x 2 - u x + λ = uo2 exp - 2αx 2 1 - exp - 2αλ cos2 ω t - xv (2-77) に比例する。従って、減衰係数が小さいことを考慮すると、次式を得る。 ∆W = 1 - exp - 2αλ ≈ 2αλ W (2-78) 一方、減衰能と位相角の遅れδとの関係より、 ∆W = 2αλ = 2πδ , ∴ α = πδ W λ (2-79) 2-18 あるいは、 ω= λ 2πv (2-80) より、減衰係数は次式で与えられる。 α=δ ω 2v (2-81) 2-2-6.まとめ 以上述べた内部摩擦の大きさを表す諸量の関係は以下で表される。 δ = Q -1 = 1 ∆W = 1 ∆ = 2v w α π 2π W 位相の遅れ 半価幅 減衰能 対数減衰率 減衰係数 強制振動 自然振動減衰 進行波減衰 (2-82)
© Copyright 2026 Paperzz