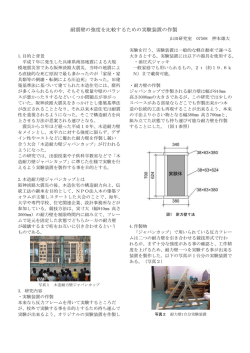
144 安全安心社会研究 客員研 究員活 動 報 告 サービスロボットリスクアセスメント 《モビリティ編》 安全安心社会研究センター 客員研究員 岩 岡 和 幸 前号掲載の『サービスロボットの安全性』にて、サービスロボットとは、 どのような物を言うのか、どのようなロボットがあるのか等をご紹介させて 頂きました。今回は、そのサービスロボットの一つである移動用パーソナル モビリティ 「Robin-M1」 のリスクアセスメントについてご紹介させて頂きます。 移動用パーソナルモビリティ「Robin-M1」とは、写真1のような ものであり、人が移動する手段として用いるロボットであります。こ の種のロボットは、現在、広いイベント会場での警備員の移動や、大 きな自然公園の体験ツアー等で既に運用されています。この分野では、 『セグウェイ』(写真2)が有名ですので、存知の方も多いかと思いま すが、そのセグウェイの小型版と思って頂ければ結構かと思います。 (但し、詳細な仕様等は異なります) この手のリスクアセスメントで大切なのは、まず、『使用上の制限』を 写真1 Robin 写真2 Segway 客員研究員活動報告 どんな目的で、どのような使われ方をするのか?』、さらに予見可能な誤 /御使用(丁寧な使われ方)として、想定内/外の使われ方をきめ細か く列挙することが重要ポイントであります。というのも、この手のサービス ロボットは、関わる人の対象者が広く、老若男女、現状の実生活上にい る人間全てが対象者になるかと思います。場合によっては、人間以外のも の(例:ペット)も登場してくるケースもあります。また、これらを用いる 路面状態等も非常に重要な見落とせない環境の一つになります。例えば、 氷のようなツルッとした滑る路面、段差がある路面、砂利や小石が転がっ ているがたがたする路面、さらさらした細かな砂地の路面など、路面状態 ひとつとってもいろいろなパラメータが存在します。 これらの『使用上の制限』がある程度固まって、初めて、そこから 危険源/危険事象の同定のステージに移行されます。その時の指標と なる規格があります。(ISO 13482: Robots and robotic devices ̶ Safety requirements ̶ Non-medical personal care robot:2013 年の秋頃正式発行になる予定) サービスロボットは、ロボットのアイテムによって、使用環境特有の様々 なパラメータが、多々種種、存在します。また、『ロボット側での絶対安全 はあり得ない』があるが故、使用者側にリスクコントロールが求められるケー スが多くなり、如何にリスクコミュニュケーションをはかるかが重要なポイ ントになるかと思います。実施した講習会では、受講生に様々なシチュエー ションを想定して、その模擬環境を作り、実際に体験して頂くカリキュラム を行いました。受講生の皆さんから聞こえて来る声は、『想定していたのと 体感したのとは、かなり違う』、『机上のリスクアセスメントと現物を前にし て体感しながら実施するリスクアセスメントとでは、見えていなかった危険 源が見えてくる』など、かなり良い評判を頂き、私としても実施した内容に かなり満足を得ることができました。 客員研究員活動報告 正確に把握することです。『誰が、どのようなシチュエーションにおいて、 145
© Copyright 2026 Paperzz