卒 業 論 文 フォーメーション制御を用いた 搬送支援システムの実験による検証 石川工業高等専門学校 電気工学科 学籍番号 071230 西野 貴大 主任指導教員 河合 康典 准教授 2011 年 3 月 Copyright 2012 by Nishino Takahiro 2012 Nishino Takahiro All rights reserved 要旨 近年,省エネやコスト削減のための努力が求められている。荷物の運搬については,大 きな荷物をなるべく省エネルギーで運搬する改善がなされている。一般的に,大きな荷物 を運搬する場合は荷物よりも大きな車両で運ぶが,車両自体の重さを軽減することにより, エネルギーコストを削減することが期待される。本研究では,運搬車両よりも大きな荷物 を運ぶ作業に対して,複数の車両が連携することにより,省エネルギーを達成できる搬送 支援システムを提案する。 そのような研究の基礎研究として,マルチエージェントシステムの合意問題がある。こ れは,各エージェントが自律的に動作を行い,他のエージェントと協調動作を行う。このと き,各エージェントの状態を情報交換によって一致させる合意問題があり,合意を達成する 制御則が提案されている。また,リアプノフの安定定理に基づいた手法が提案されており, 更に仮想構造を用いてフォーメーション制御に応用する研究も行われている。 そこで本研究では,フォーメーション制御を用いた搬送支援システムを考える。ビーク ルが移動する際は,フォーメーションを組みながら移動するので, 荷物の運搬を支援でき るものと考える。 従来研究で用いられている仮想構造を用いて,1 台のビークルに 1 台の 仮想ビークルを与え,3 台の仮想ビークルを一致させることで,フォーメーションを組む。 新たに,ビークルのダイナミクスを考慮することで,左右車輪のトルク制御を行う制御則 をリアプノフ安定定理により導出する。このとき, 3 台のビークルの情報のやりとりをグ ラフ構造で表す。このことにより, 情報の交換を表すグラフラプラシアンを用いた制御則 を導出する。 提案した制御則を用いて,3 台のビークルがフォーメーションを形成しなが ら目標値に達成することを確認する。 その後,制御実験において実際のビークルが目標値 に達成することを確認する。 i 目次 第 1 章 序論 1.1 1.2 1.3 1 :: : : : : : : : : : :: : : : : : : : : : :: : : : : : : : : : 従来研究と研究の目的 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 論文構成 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 研究の背景と動機 第 2 章 数学的準備 2.1 2.2 2.3 2 : :: : : : : : : : : : :: : : : : : : : : : :: : : : : : : : : : グラフラプラシアン : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : グラフラプラシアンの性質 : : : : : : : : : : : : : : : : : : : : : : : : : : : : クロネッカー積 第 3 章 問題設定 3.1 3.2 : : : : : : : : :: : : : : : : : : : :: : : : : : : : : : : : : : : : :: : : : : : : : : : :: : : : : : : : : : :: : : : : : : : : : 第 4 章 制御実験 4.1 4.2 4.3 4.4 実験結果 実験考察 : : : : : : : : : : : : : : : : 第 5 章 結論 5.1 5.2 7 9 12 ビークルの製作 実験準備 2 2 3 7 ビークルの数式モデル 制御則 1 1 1 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 12 13 14 16 17 今後の課題 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 17 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 17 付 録 A 車両の製作 18 A.1 A.2 A.3 本研究での成果 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 18 基盤の配線 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 18 車輪部分の製作 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 19 電池台 ii 目次 謝辞 20 参考文献 21 iii 図目次 2.1 3.1 3.2 3.3 4.1 4.2 4.3 4.4 4.5 4.6 4.7 4.8 4.9 4.10 4.11 A.1 A.2 A.3 : : : :: : : : : : : : : : :: : : : : : : : : : :: : : : : : : : : : 3 : : : : : :: : : : : : : : : : :: : : : : : : : : : :: : : : : : : : : : 仮想ビークル : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 仮想ビークルの一致 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 7 8 8 グラフ構造 ビーグル : : : : : :: 回路図 : : : : : : : : 実験装置 : : : : : : : ビークルの配置 : : : xri の位置 : : : : : : yri の位置 : : : : : : xi の位置 : : : : : : : yi の位置 : : : : : : : 姿勢角 i : : : : : : : ri : : : : : : : : : : li : : : : : : : : : : ビークル 配線図 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 12 12 14 14 15 15 15 15 15 15 16 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 18 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 18 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 19 電池台の設計図 電池台 : : : : : : : : : : : iv 表目次 表目次 4.1 仕様した部品 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 13 4.2 ギアボックスの特性 : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 13 4.3 IP の振り分け : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 14 A.1 6 速ギヤボックス HE : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 19 1 第 1章 序論 1.1 研究の背景と動機 近年,省エネやコスト削減のための努力が求められている。荷物の運搬については,大 きな荷物をなるべく省エネルギーで運搬する改善がなされている。一般的に,大きな荷物 を運搬する場合は荷物よりも大きな車両で運ぶが,車両自体の重さを軽減することにより, エネルギーコストを削減することが期待される。本研究では,運搬車両よりも大きな荷物 を運ぶ作業に対して,複数の車両が連携することにより,省エネルギーを達成できる搬送 支援システムを提案し,実験により検証する。 1.2 従来研究と研究の目的 フォーメーション制御を応用した研究として,文献 [1℄,[2℄ がある。文献 [1℄,[2℄ では,仮 想構造を用いてフォーメーション制御に応用している。本研究では,文献 [1℄,[2℄ を用いて 荷物の搬送支援システムの開発を行う。 3 台の二輪車両のビークルを考え,3 台のビークル がフォーメーションを組んで荷物を運ぶことを目的とする。 1.3 論文構成 はじめにビークルのモデルを示し,問題設定を行う。このとき仮想構造という概念を用 い,仮想ビークルの一致を考える。1 台につき 1 台の仮想ビークルを考え,3 台の仮想ビー クルが一致した情報に収束することで,フォーメーションの達成を示す。次に,ビークルの ダイナミクスを考慮した制御則を提案し,マルチビークルシステムに適用する。制御実験 に行い,仮想ビークルが一致し,フォーメーションが形成されるかを検証する。 2 第 2 章 数学的準備 第 2章 数学的準備 本章で扱う数式について, 容易に理解できるよう説明する。 2.1 クロネッカー積 クロネッカー積は,行列を計算する際の演算子で,本稿ではクロネッカー積を ことにする。A げる。 で表す 2 Rmn,B 2 Rpq とすると, A B = Rmpnq となる。次式に具体例をあ 2 A=4 3 2 3 1 25 5 65 ;B = 4 3 4 10 12 のとき, 2 5 6 8 A B = 18 21 24 6 6 67 6 6 615 4 10 14 20 28 3 127 16777 24775 32 となる。 2.2 グラフラプラシアン グラフラプラシアン (L) はグラフ構造を数式で扱えるようにするための行列である。L = D A で定義し,D は次数行列,A は隣接行列を表す。 次数行列 (D ) は対角成分に,i 台目のビークルの近傍の数が入り,それ以外の要素は 0 と する n n の行列である。 隣接行列 (A) は,j 番目のビークルが i 番目の近傍にあるとき, 2.3. 3 グラフラプラシアンの性質 aij = 1 とし,それ以外の要素が 0 となる n n の行列である。具体例を挙げる。図 (2.1) の ようなグラフ構造を考える。まず次数行列を考える。 1 台目ビークルは 2 台目ビークル,2 1 2 図 3 2.1: グラフ構造 台目のビークルと繋がるので, 1 行 1 列目には 2 が入る。2 台目ビークルは 1 台目ビークル, 3 台目ビークルと繋がるので, 2 行 2 列目には 2 が入る。同様にして,各ビークルの近傍の 数を考えると,次数行列は 2 3 2 0 07 6 7 D=6 (2.1) 60 2 07 4 5 0 0 2 となる, 次に隣接行列を考える。 1 台目ビークルは 2 台目ビークルの近傍にあるので, a21 = a12 =1 となる。 また, 2 台目ビークルは 3 台目ビークルの近傍にあるので, a32 =a23 =1 と なる。 同様にして各ビークルに適用すると, 隣接行列は 2 3 0 1 17 A= 0 1775 1 1 0 6 6 61 4 (2.2) となる。よって (2.1) 式から (2.2) 式を引くことにより L=D 2 A 3 2 1 17 6 = 664 1 2 1775 1 1 2 (2.3) となる。これがグラフラプラシアンである。 2.3 グラフラプラシアンの性質 3 個の点からなる L を考える。x_ = L:2 x で表されるシステムは x ! (xr1 xTl1 I2 )x(0) = 1 (t ! 1) (2.4) 4 第 に収束する。ただし,L:2 は L 2 章 数学的準備 I2 を表し,以降 L Im = L:m と記述する。また,Lm は m 次の単位行列である。xr1 ,xl1 は xTl1 xr1 = 1,xTl1 1 = 1 を満たす L の零固有値に対する右, h i T T T 左固有値ベクトルである。x(0) は初期値を表しており, は合意値,x = x1 x2 x3 で あり,x = h i 1 1 1 1 1 1 h = xai xbi で,xi i である。つまり (2.4) 式は (t ! 1) x1 = x2 = x3 = (2.5) を示している。具体的に,本研究で扱うグラフラプラシアン式 (2.3) の固有ベクトルを求め る。まず固有値を求める。 L E = = 展開する。 2 L E 1 1 2 1 1 2 1 1 2 6 6 6 4 2 3 2 1 17 1 2 1775 1 1 2 1 1 2 1 1 2 2 0 6 6 60 4 0 0 1 1 3 07 0775 (2.6) = (2 )3 1 1 (2 ) (2 ) (2 ) = (3 62 + 9) = (2 6 + 9) = ( 3)2 = 0 より ( 3)2 = 0 = 0; = 3 = 0 に対する固有ベクトルを求める。 2 32 3 2 3 (2.7) 2 3 2 1 17 61 7 607 6 6 6 1 2 1775 6642 775 = 6640775 4 1 1 2 3 0 2 3 1 6 17 6 7 6 7 6 7 62 7 = o 617 4 5 4 5 3 1 o : 実数 (2.8) 2.3. 5 グラフラプラシアンの性質 = 3 に対する固有ベクトルを求める。 2 6 6 6 4 1 1 1 32 3 1 1 1 17 617 607 1775 6642775 = 6640775 1 3 0 2 3 2 6 17 6 7 62 7 4 5 6 p6 6 4 = 3 ここで, 2 3 3 17 1775 0 p : 実数 (2.9) q : 実数 (2.10) Æ = 0 となるように Æ を求める。 2 6 6 6 4 1 1 1 32 3 1 1 1 2 3 17 6Æ1 7 607 1775 664Æ2 775 = 6640775 1 Æ3 0 2 3 2 6 17 6 7 6Æ2 7 4 5 6 q6 6 4 Æ = Æ3 よって,固有ベクトルは 3 17 1 775 2 2 3 0 0 07 P 1 LP = 3 0775 0 0 3 6 6 60 4 となり,また 2 (2.11) 3 1 1 17 6 7 P =6 61 7 1 1 4 5 1 0 2 2 P 1 = 1 63 61 62 4 1 6 1 3 3 1 3 0 1 2 1 6 1 3 7 7 7 5 (2.12) である。つまり xl1 = h 1 3 1 2 1 6 iT , xr 1 iT = 1 1 1 x x = T l1 r 1 h h となっているので 2 3 1 1 3 1 2 i6 7 7 1 6 6 7 6 415 1 =1 (2.13) 6 第 を満たし, 章 数学的準備 2 3 x 1= T l1 となる。 2 h 1 1 3 1 2 i6 7 7 1 6 6 7 6 415 1 =1 (2.14) 7 第 3章 問題設定 3.1 ビークルの数式モデル ビークルは独立二輪車両と考える。i 台目 (i = 1 3) のビークルモデルを図 3.1 のよう h iT に考える。 重心位置の x,y 座標を xi yi ,姿勢角を i と置き,速度 vi と角速度 !i を 制御入力とすると,ビークルの状態は式 (3.1) で表される。 2 3 2 3 x_ os i 07 2 3 6 i7 6 6 7 6 7 vi 6 y_ i 7 = 6 sin i 07 4 5 (i = 1 4 5 4 5 i 3) _i 0 (3.1) 1 y 2r vi Ωi yi θi 2b 0 x xi 図 3.1: ビーグル また,左右の車輪角速度 !li ,!ri から速度 vi ,角速度 i へ変換する式は以下のようにな る。ここで 2r と 2b はそれぞれ,車輪の直径と車輪間隔である。 2 3 2 32 3 4 vi 5 i = 2rb 4 b b 1 1 !ri 5 !li 54 (3.2) 8 第 3 章 問題設定 本研究の目的は,4 台のビークルがお互いに情報を交換し,任意のフォーメーションを形成 しながら目標値に達することである。 そこで,図 3.2 のように仮想構造を考え,1 台のビー クルに対して 1 台の仮想ビークルを考える。仮想ビークルの状態が全て図 3.3 のように一致 すれば,フォーメーションが形成されると言える。そのことを合意と呼ぶ。仮想ビークルの y y θri yri xdi ビークル2 ydi yi 0 Ωi xi 図 3.2: ビークル3 vi 仮想ビークル θi xri ビークル1 x 0 仮想ビークル x 図 3.3: 仮想ビークルの一致 モデルを表すと式 (3.3) になる。各仮想ビークルは他の 2 台と情報交換するので,グラフラ プラシアンは式 (3.4) となる。 2 3 2 3 x x + xdi os i ydi sin i 7 6 ri 7 6 i 6 7 6 7 6 yri 7 = 6 yi + xdi sin i + ydi os i 7 4 5 4 5 i ri 2 L 6 = 664 式 (3.3) の両辺を微分すると次式を得る。 2 3 2 (3.3) 3 2 1 17 1 2 1775 1 1 2 (3.4) 3 x_ x_ xdi _i sin i ydi _i os i 7 6 ri 7 6 i 6 7 6 7 6 y_ ri 7 = 6 y_ i + xdi _i os i ydi _i sin i 7 5 4 5 4 _ri _i (3.5) 3.2. 9 制御則 式 (3.1) を式 (3.5) に代入する。 2 3 2 x_ 6 ri 7 6 7 6 y_ ri 7 4 5 6 = 664 _ri 3 vi os i + i ( xdi sin i ydi os i )7 7 vi sin i + i (xdi os i ydi sin i ) 7 5 i 2 os 3 xdi sin i ydi os i 7 2 3 7 4 vi 5 xdi os i ydi sin i 7 5 i 6 6 = 64 sin i 0 1 式 (3.2) を式 (3.6) に代入して,式 (3.7) を得る。 2 3 2 3 x_ 6 ri 7 6 7 6 y_ ri 7 4 5 _ri = os 2 = xdi sin i ydi os i 7 2 7 4b xdi os i ydi sin i 7 5 i r 6 6 2b 64 sin i 0 1 1 b os =4 32 x sin 32 3 ! 5 4 ri 5 1 !li ydi os i b os i + xdi sin i + ydi os i 7 2 3 7 4!ri 5 ydi sin i b sin i xdi os i + ydi sin i 7 5 !li 1 3 b 3 i di i r 6 6 2b 64 b sin i + xdi os i 2 (3.6) i 1 Bi 5 4!ri5 B !li (3.7) ここで,Bi ,B はそれぞれ 2 3 r 4b os i xdi sin i ydi os i b os i + xdi sin i + ydi os i 5 2b b sin i + xdi os i ydi sin i b sin i xdi os i + ydi sin i i r h B = 2b 1 1 Bi = である。qri h = x_ ri y_ri _ri iT ,Si h = BiT BT iT , !i h = !ri !li iT (3.8) (3.9) とおくと,次式が得ら れる。 q_ri = Si !i 3.2 (3.10) 制御則 車輪のダイナミクスを考慮した制御則を考える。車輪のダイナミクスは線形システムで あると仮定すると J !_i + C!i = i (3.11) 10 第 3 章 問題設定 となる。Ji と Ci は対角要素に Jri と Jli ,Cri と Cli を持つ 2 行 2 列の対角行列で Ji > 0 は慣 h iT 性モーメント,Ci > 0 は粘性摩擦係数である。また,i = ri li であり,左右の車輪 に加えるトルクである。リアプノフ関数より,制御則となる i を求める。ポテンシャルエ ネルギーの式は 1 2 V = (! T J! + qrT diagKG1 L:3 qr + (qr qg )T diagKG2 (qr qg )) (3.12) で与えると考える。J は対角要素に Ji が並んだ 6 行 6 列の対角行列であり, また qr = h iT qrT1 qrT2 qrT3 である。 qg は, 一列に qgi が並んだベクトルで, 目標値となる座標と姿 h iT 勢角であり,qgi = xgi ygi gi である。diagKG1 と diagKG2 は, ビークル同士の偏差 の設計値と,目標値との偏差の設計値であり,対角要素に KG1 と KG2 を持つ行列である。 KG1 は対角要素に Kx1 ,Ky1 ,K1 をもつ対角行列で,KG2 は対角要素に Kx2 ,Ky2 ,K2 を 持つ対角行列である。式 (3.12) を時間微分する。 1 2 + 21 (q_r diagKG2 (qr qg ) + (qr qg )T diagKG2 q_r ) = !T J !_ + q_r T diagKG1L:3 qr + q_r diagKG2(qr qg ) V_ = (!_ T J! + ! T J !_ + q_r T diagKG1 L:3 qr + qrT diagKG1 L:3 q_r ) (3.13) これをリアプノフ候補関数として,安定性を調べる。ここで式 (3.10) を 3 台まとめて表す と,式 (3.14) を得る。 q_i = (diagSi )! (3.14) このとき,diagSi は対角要素に Si を含む行列である。また,ダイナミクスの式 (3.11) を 3 台まとめて表すと,次式を得る。ただし,J > 0,J > 0 である。 J !_ + C! = (3.15) 式 (3.14) と式 (3.15) を式 (3.13) に代入して整理する。 V_ = ! T ( C! ) + ! T J !_ + diagSiT diagKG1 L:3 qr + ! T diagSiT diagKG2 (qr = !T C! + !T + (diagSi)T (diagKG1 L:3qr + diagKG2 (qr qg ) ここで,! T C! > 0 なので,右項が 0 ならば V_ qg ) (3.16) 0 となり,安定となる。右項を 0 とする は = (diagSi )T (diagKG1 L:3 qr + diagKG2 (qr qg )) (3.17) で与えられる。このとき,式 (3.16) は V_ = ! T C! 0 (3.18) 3.2. 11 制御則 となる。式 (3.18) となるときの式 (3.17) が制御則となり,3 台それぞれを式で表すと1台目 の制御則は 2 1 = h B1T 2 台目は K ((x xr2 ) + (xr1 yr2 ) + (yr1 r2 ) + (r1 xr3 )) + Kx2 (xr1 xg1 )7 7 yr3)) + Ky2 (yr1 yg1 ) 7 5 r3 )) + K2 (r1 g1 ) K ((x xr1 ) + (xr2 i 6 x1 r2 6 BT 6 K ((y yr1 ) + (yr2 4 y1 r2 K1 ((r2 r1 ) + (r2 xr3 )) + Kx2 (xr2 xg2 )7 7 yr3)) + Ky2 (yr2 yg2 ) 7 5 r3 )) + K2 (r2 g2 ) i 6 x1 r1 6 BT 6 K ((y 4 y1 r1 K1 ((r1 2 2 = h B2T 3 台目は 2 3 = h B3T 3 K ((x i 6 x1 r3 6 BT 6 K ((y 4 y1 r3 K1 ((r3 xr1 ) + (xr3 yr1 ) + (yr3 r1 ) + (r3 となり,これをマルチビークルシステムに適用する。 3 3 xr2 )) + Kx2 (xr3 xg3 )7 7 yr2)) + Ky2 (yr3 yg3 ) 7 5 r2 )) + K2 (r3 g3 ) 12 第 4 章 制御実験 第 4章 制御実験 ビークルの製作 4.1 実際に製作したビークルを図 4.1 に, 回路を図 4.2 に示す。また,1 台のビークルを製作 する際に使用した部品を表 4.1 に示し,モータの特性を表 4.2 に示す。ただし,タイヤ直径 を 36[mm℄ として計算している。なお,詳しい車両の設計方法を付録 A に示す。 H8マイコン Vcc CNX551 7.2V 34 33 160mm 32 CNX551 6 1 2 4 14 3 6 18 12 16 13 9 5 10 11 M 31 56mm 14 10 CNX552 3 3 57mm 210mm 175mm 2 CN450 TA7279AP M 7 GND 1 8 2.4V 36mm 22mm 6 17mm 4 3 2 1 SUC30505 11 +Vin +Vout 12 13 図 4.1: Vcc 無線LAN コンバータ LCD RC -Vin -Vout 14 ビークル 図 4.2: 回路図 GND 4.2. 13 実験準備 表 4.1: メーカー 仕様した部品 品名 備考 ユニバーサルプレート L 車体の底面と屋根 6 速ギヤボックス HE 左右車輪の動力 トラック&ホイールセット 左右車輪に使用 各 IC 電源 秋月電子 7.2V レーシングパック 1600SP 無線 LAN コンバータ GW-SC150N DC-DC コンバータ SUCS30505 AKI-H8/3052LAN 開発ボードキット クリエイティブ ウェブカムライブウルトラ タミヤ PLANEX COSEL アイコー電子 電池ボックス 表 4.2: SBH-331AS 最大消費電力 3W 最大出力電圧 3V 3 用,フタ付き 単3 ギアボックスの特性 適正電圧[V] 出力回転数[rpm] トルク[mN・m] 速度[mm/se] 3.0 4.2 132 101.2 248.8 実験準備 実験装置を図 4.3 のように設置する。 車両の位置座標と姿勢角の情報は,天井に設置した カメラによって認識され,パソコンに送られる。パソコンは,受信した情報を画像処理する。 また,各ビークルには ID が振り分けられており,マイコンから無線 LAN コンバータ,アク セスポイントを介し PC へ,各ビークル両車輪に加えるトルクの大きさを要求する。PC は, 要求してきたビークルが,何番目なのかを ID によって判断し,その ID へ位置,姿勢角を送 る。またビークルは互いの情報を交換する。マイコンは,受信した情報を制御則に従って処 理し,PWM 制御をして TA7279AP へ送り,モータを制御する。各ビークルのマイコンの IP,無線 LAN コンバータの IP を表 5.3 に示す。アクセスポイントの IP を 192.168.1.100, パソコンの IP を 192.168.1.120 と設定し,各サブネットマスクは 255.255.255.0 とする。 14 第 4 章 制御実験 4.3: IP の振り分け ビークル i i 番目ビークルのマイコン IP 無線 LAN コンバータの IP 1 192.168.1.113 192.168.1.103 2 192.168.1.112 192.168.1.102 3 192.168.1.111 192.168.1.101 表 また,各ビークルの位置と各仮想ビークル,目標値の位置は図 4.4 のようにする。目標値 h iT は qg = 400 300 0 である。 カメラ アクセスポイント 画像 処理 パソコン y 目標値 ビークル3 ビークル2 無線LANコンバーター マイコン 仮想ビークル モータドライバ ビークル1 x 0 図 4.3 4.3: 実験装置 図 4.4: ビークルの配置 実験結果 実験結果を図 4.5-4.11 に示す。横軸は,時間 (seond) としており,i 番目ビークルを Vi と している。図 4.5-4.6 は,各仮想ビークルの x 座標の値と y 座標の値を,図 4.7-4.9 はビーク ルの重心位置と,姿勢角の値,図 4.10-4.11 は右,左車輪駆動の際の PWM を行う前の値を 示す。図 4.5-4.6 において,実線は仮想ビークル 1 を,破線は仮想ビークル 2 を,鎖線は仮 想ビークル 3 を示す。また図 4.7-4.9 において,実線はビークル 1 を,破線はビークル 2 を, 鎖線はビークル 3 を示す。また図 4.10-4.11 において,太い実線はビークル 1 を,太い破線 はビークル 2 を,,太い鎖線はビークル 3 を示す。ただし, 細い線がそれぞれ本来の制御トルクである。 100 < < 100 で飽和するため, 15 実験結果 500 300 450 250 400 350 xr1 xr2 xr3 300 250 0 5 図 10 15 time[s℄ 20 25 150 50 0 30 300 450 250 400 350 x1 x2 x3 250 5 図 10 15 time[s℄ 20 5 10 図 500 200 0 yr1 yr2 yr3 4.5: xri の位置 300 25 15 time[s℄ 20 25 200 150 y1 y2 y3 50 0 30 30 4.6: yri の位置 100 4.7: xi の位置 5 10 図 2.5 2 300 15 time[s℄ 20 25 30 4.8: yi の位置 τr1 τr2 τr3 200 1.5 100 1 ri i [rad℄ 200 100 yi [pixel℄ xi [pixel℄ yri [pixel℄ xri [pixel℄ 4.3. 0.5 −100 0 −0.5 0 0 θ1 θ3 5 図 10 4.9: 15 time[s℄ θ2 20 姿勢角 i 25 −200 30 −300 0 5 10 15 time[s℄ 図 4.10: ri 20 25 30 16 第 4 章 制御実験 400 τl1 τl2 τl3 300 200 li 100 0 −100 −200 −300 0 4.4 5 10 15 time[s℄ 図 4.11: li 20 25 30 実験考察 図 4.5,4.6 から,仮想ビークルが目標値に向かっていることが分かる。図 4.10,4.11 よ り,車両が前進,後退,方向転換をしていることがわかる。しかし,図 4.9 より,姿勢角が 収束しないこと,ビークル 3 の振動が大きいことが問題として上げられる。これらの原因 は,リアプノフ関数の式 (3.18) に,ビークル同士の偏差を表す L:3 qr の項と,目標値との偏 差を表す (qr qg ) の項が含まれないためと考えられる。式 (3.18) は,車輪の角速度のみ漸 近安定が保証されているが,仮想ビークル同士の漸近安定や,目標値への漸近安定は保証 されていない。 17 第 5章 結論 5.1 本研究での成果 本研究では,運搬車両よりも大きな荷物を運ぶ作業に対して,複数のビークルが連携す ることにより,省エネルギーを達成できる搬送支援システムの実験による検証を行った。は じめにビークルのモデル化を行い,制御則を提案し,実験から車両が目標値に達すること を確認した。 5.2 今後の課題 実験から, ビークルが目標値に至るまでに,ビークル同士が接触することがあった。この ことから,今後はビークル同士の衝突回避を考慮した制御即の提案が課題となる。 18 付録 A 車両の製作 付 録A 車両の製作 車両を製作するにあたり本研究で製作した方法を詳しく説明する。 電池台 A.1 本節では,車両の各 IC の電源となる 7.2V レーシングパック 1600SP(以下電池) を乗せる 電池台の製作方法を解説する。各ねじ穴は直径 3mm としており,白丸の穴には長さ 8mm, 黒丸の穴には長さ 12mm のねじを入れる。白丸には電池がずれない様,固定する部品を取 り付ける。黒丸は,電池台が車体からずれ落ちない様,車体と固定する穴としている。電 池台設計図を図 A.1 に,電池台の模式図を図 A.2 に示す。 5 160 5 5 30 50 35 65 10 5 25 20 10 5 図 A.2 A.1: 電池台の設計図 図 A.2: 電池台 基盤の配線 2 枚の基板同士の結線方法や,マイコン,無線 LAN シンプルコンバータ,モータドライ バの電源などの詳しい配線を説明する。図 A.3 に配線図を掲載する。上の基板が各 IC の電 源がメインとなっており,下の基板は,マイコンからの信号をモータに送る信号の基板と している。 19 車輪部分の製作 A.3. JP1 -Vout -Vin +Vout RC SUCS30505 +Vin H8 GND 7.2V SW1 JP2 モーター H8 H8 モーター JP1 JP2 GND TA7279AP 図 A.3 A.3: 配線図 車輪部分の製作 本研究では,表 5.1 の,シングルギヤボックスを使用して車輪部を製作する。モータは 付属の RE-260 を使用した。モータの特性を表 A.1 に示す。ただし,ギア比 505.9 と 1300.9 のトルクはクラッチ作動時の値である。モータの特性を計算するために,必要な計算手法 を記述する。モータの回転数 N [rpm℄, ギヤ比 Z ,タイヤ直径 d[mm℄ とすると,出力回転数 = d NZ [mm/min℄= dN 60Z [mm/se℄ となる。単位換算は,1[kgf・ m℄=g[N・m℄ とし,g = 9:8062[m/s2℄ として計算する。 は N Z となり,タイヤ速度 v A.1: 6 速ギヤボックス HE ギヤ比 出力回転数 [rpm℄ 回転トルク [mN・m℄ 11.6 870 15.8 29.8 338 40.7 76.5 132 101.2 196.7 51.3 235.4 505.9 19.9 226.1 1300.9 7.8 226.1 表 速度 [mm/se℄ 1639.9 637.1 248.8 96.7 37.5 14.7 20 謝辞 謝辞 本研究を進めるにあたり, 御指導と助言をいただきました河合康典准教授に心より深く 感謝いたします。ならびに,研究に関する問題に対して,,多くの助言をしてくれた河合研 究室の同期の皆様にも深く感謝いたします。 最後に, これまでの学生生活を可能にし。暖かく見守っていただいた両親に深く感謝し ます。 21 参考文献 [1℄ 吉岡,滑川, “ マルチエージェントシステムの合意問題とそのフォーメーション制御へ [2℄ 永島,河合, “ フォーメーション制御を用いた搬送支援システムの開発, ”平成 22 年度 の応用,”計測自動制御学会論文集, vol. 44, no. 8, pp. 663‐669, 2008. 電気関係学会北陸支部連合大会 講演論文集, pp.H-15, 2010.
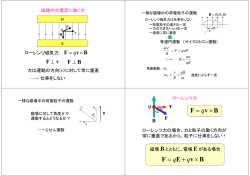
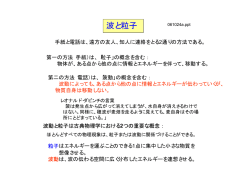
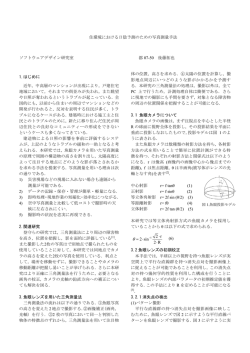
© Copyright 2026 Paperzz