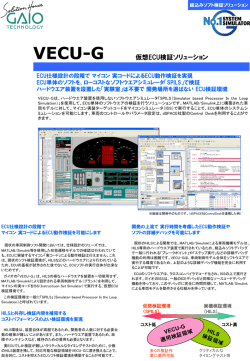
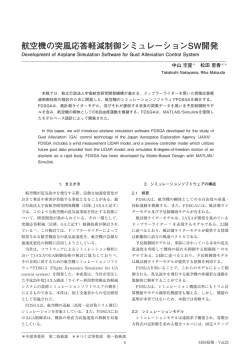
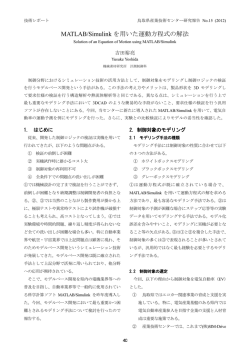
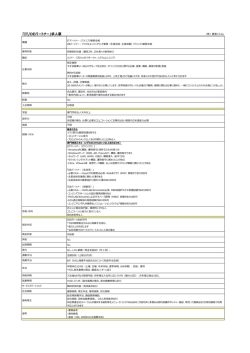
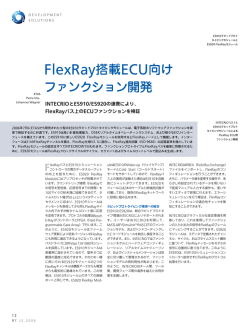
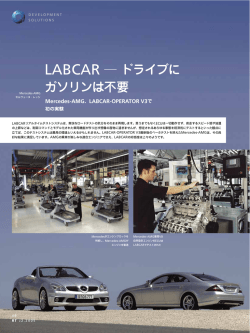
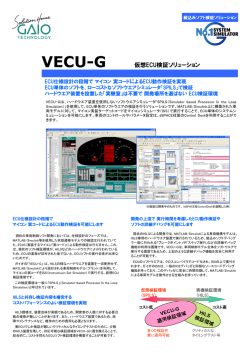
特集 車両運動をリアルに再現するシミュレータ 「CarSim」と連携 ガイオマイコンシミュレータ&MATLAB/Simulinkを使用したSIL-S環境 ∼複雑化する自動車ECUソフト開発を効率化する 先端シミュレーション技術について∼ 本特集では、 米国 Mechanical Simulation 社の正規代理店であり、車両運動シミュレーション利用技術のコンサルティングを手 がけるバーチャルメカニクス社 ( 所在地 :名古屋市)代表取締役の永瀬氏のご協力 ・監修を頂き、複雑化する自動車 ECU の組 込みソフトの検証手法として主流になりつつある、 ECU ソフト開発のシミュレーション環境について解説します。 車両運動シミュレーション ソフトウエア 「CarSim」 CarSim は、米国 Mechanical Simulation 社が開発した、車両運動シミュレーション パッケージソフトウエアです。乗用車や小 け)も同様のシミュレーションを行うことがで や評価担当者の様に車両運動モデルを きます。 自分の担当製品の設計・評価の為にすぐ に利用したいエンドユーザ向きではありま せんでした。 簡単に利用できる実用的な 車両運動シミュレーション 型商用車の、さまざまな運転条件 ( アクセ ル、ブレーキ、ハンドル、シフト操作)と 車両運動シミュレーションモデル(理論モ 環境条件( 摩擦係数や高さ変化のある道 デル)の研究は、 既に数十年前から行な 路コース、横風等)での動的な挙動を、パ われてきましたが、 利用者が自ら微分方 ソコン上の簡単操作で、 シミュレーション 程式を解くプログラムを書いて計算結果を 解析 ・評価することができます。 得る方法がずっと続いていました。 その また、 MATLAB/Simulink とのインタ 後、ADAMS等の汎用機構解析ソフトや、 フェースを取ることで、 さまざまな車両制 MATLAB/Simulink等のモデリングツール 御システムの制御ロジックを、実車評価の を使った利用者独自の内製モデルも使わ 前に、 パソコン上で容易に検討 / 検証す れてきましたが、 それらは自分のニーズ ることができます。 に合ったモデルを自由に構築できるメリット 姉妹ソフトの TruckSim(中 ・大型トラック がある反面、使い勝手や計算速度、メン やバス向け)や、 BikeSim(自動二輪車向 テナンス性等で問題があり、制御設計者 一方、 近年自動車の進化の過程で、 ABS を初めとする電子制御システムが数 多く開発され、 それらが益々高度化 ・複 雑化して来ました。これらを効率良く開発 するために、コストや時間が掛かる実車テ ストの代替として使用できる、信頼性が高 く、かつ使い勝手のよい実用的な車両運 動シミュレーションソフトの出現が待ち望ま れていました。 そのようなニーズを満たすべく、 米国の ミシガン大学出身のベンチャー企業である Mechanical Simulation 社が開発 ・整備し てきた、 エンドユーザ向けの車両運動シ ミュレーションパッケージソフトがCarSimで す。 図 1.CarSim のグラフィックデータベース入力画面 : GUI 上で車両に関するパラメータを入力するだけで車両特性の定義が可能 2 GAIO CLUB 2006 Vol.1 図3. CarSim 単体での凹凸の設定された三次元道路コース走行のシミュレーション例 図2. CarSim 単体でのレーンチェンジ走行試験のシミュレーション結果表示例 MATLAB/Simulink の制御モデル と結合したシミュレーション CarSim は、 MATLAB/Simulink 上で動 作する 「 S-Function」車両モデルとの入 出力インタフェースを標準装備していま で、特性の異なる車両の追従走行と言っ レーションを30 秒より遥かに短い時間で た、ITS 分野での制御研究開発にも利用 終わらせることができます。 (3 G H z の することが出来ます。 PentiumPC で実時間の10 倍以上高速。) このように Windows の PC 上で Simulink これにより、RT-LAB、A&D、CRAMAS、 モデルと結合して動かすのが、 最も一般 dSPACE、LabVIEW-RT などのリアルタイ 的なCarSim の利用方法です。 ムシステム上で、CarSim 車両モデルと実 機の ECU やアクチュエータを実時間で結 す。ブレーキ系、操舵系、パワートレー ン系やその制御システムなどは、 CarSim の外部でユーザーが作成したSimulinkブ ロックを、 CarSim 車両モデルと結合する んだ H I L - S ( H a r d w a r e I n t h e L o o p 実機の ECU やアクチュエータを 使った HIL-S 環境での利用 ことにより、 自由にモデルを置き換えたり 制御を入れたりすることが出来ます (図 CarSim は WindowsPC 上で実行されま 4、 図5) 。 すが、そのシミュレーション速度は実際の また、 Simulink 上で複数の S-Function システムの動作速度より高速です。 例え 車両モデルを独立に走らせることが可能 ば、 実時間で 30 秒の車両挙動のシミュ Simulation)環境を構築することができま す。現在、ブレーキ系、操舵系、パワー トレー ン系 等 の 制 御 システム開 発 に CarSim の HIL-S 利用が増加しています。 図4. Simulink 上での ABS 制御ブロックとCarSim を接続した例 : 図5. ABS 制御有無比較試験のアニメーション出力例 : ※中央の緑のブロックが ABS 制御部分、左上の車ブロックが S-Function で定義されたCarSim モデル ※青い車は ABS 非動作で、 急ブレーキ動作でコースを外れている GAIO CLUB 2006 Vol.1 3 マイコンシミュレータと連動した SIL-S 環境での利用 動をシミュレーションで確認しながら、ECU システム検証が可能になります。 制御ロジック (コントローラ) MATLAB/Simulink HIL-S 環境での ECU 動作検証は、 自 動車制御ソフト開発にはメジャーな手法で すが、装置が比較的大がかりで高価であ 自 動 車 制 御 対 象 (プラント) モデルベース開発におけるECU 検 証環境への期待 MATLAB/Simulink MATLAB/Simulink ることなど、 課題も残されています。 そこ で、ECUやアクチュエータなどのハードウ 現在多くの自動車開発においては、 今 ECUソフト エアを全てソフトウエアで実現するSIL-S 後の自動車 ECU 開発の手法として、 「 モ I SSで実行 ( Software In The Loop Simulation)環境 デルベース開発」が取り入れられようとし が期待されています。 ています。 フィードバック制御の要素を多 ガイオの 「 NO.1システムシミュレータ」も く含む複雑な自動車部品の開発において 自 動 車 制 御 対 象 (プラント) MATLAB/Simulink SIL-S 環境への応用が可能です。ガイオ は、 システムをブロック線図モデルで捉え のマイコンシミュレータ 「 System-G」は、 る手法が、 最も開発効率を高める方法で MATLAB/Simulink の S-Function モデル あると考えられています。 との インタフェー スを持 っ て お り、 このモデリングツールには M A T L A B / MATLAB プラントを仮想ハードウエアとし Simulinkが事実上のデファクトとなっていま て、 ECU のソフト検証を行うことができま す。 最初の車両仕様定義のフェーズで し、 MATLAB/Simulink 上に残る自動車 す。 は、制御ロジックと自動車プラント( 被制御 プラントを仮想的な被制御モデルとして ハードウエア)が1つのモデルとして定義 Simulink 上で動作させ、 これらを連動す CarSim を取り込んだ SIL-S 環境 MATLAB/Simulink 図7:車両仕様モデルから 制御ロジックを切り出す : 自動車プラントはそのまま使用し、マイコンシミュレータ ( ISS)で制御ロジックを実行 されます。 ることで、 SIL-S 環境で ECU ソフトのシス 実際のECU ソフト開発においては、図7 テム検証を行うことができます。 下図6に示すように、CarSimとの接続に に示すように、 この制御ロジック部分をC この環境では実機を一切使用しないた 関しては、MATLAB/Simulinkを介して接 言語等でコード化し、ECUのマイコンに実 め、開発ツールに対するコストダウンや、 続 (マイコンシミュレータ→ M A T L A B / 装することになります。 そこで、 この実装 開発の早い段階からの ECU システム検 Simulink → CarSim)することで、 車両挙 コードをマイコンシミュレータ( ISS)で実行 証が可能になるメリットがあります。 MATLAB/SimulinkによるABS モデル ABS 制 御ブロック(ECU ) 展開 マイコンシミュレータ(System-G) 検証対象 のECU ソフト を実行 展開 通信 対応 マイコンシミュレータ(System-G ) インタフェースブ ロック ※メモリマップトIOのS-Functionブロック ※ S-Function ブロックを通 じて MATLAB/Simulinkと プロセス間通信 CarSim車 両 運 動 シミュレーション 図6:マイコンシミュレータ+ MATLAB/Simulink + CarSim の接続の仕組み : マイコンシミュレータとCarSim が各々 MATLAB/Simulink の S-Function モデルで接続される 4 GAIO CLUB 2006 Vol.1 自動車V字開発における ツール適用箇所 車両仕様 車両仕様 定 義 定義 実車 テスト 実 車テスト CarSim MATLAB/Simulink これらの HIL-S、 SIL-S 環境の、 自動 車V字開発におけるシミュレーション適用 箇所について確認してみましょう。図8に MATLAB/Simulink上での 動作シミュレーション 制御ロジックを機 能 単 位 に マイコンシミュレータで実 行 検 証 サブシステム サブシステム ECU ECU 仕様定義 仕様定義 CarSim MATLAB/Simulink マイコンシミュレータ CarSim *ホワイトボックステスト HIL -S ソフトウェ ア ソフトウェア 合体検証 合体検証 CarSim MATLAB/Simulink HWエミュレータ カバレッジマスター 等 単体 テストツール 実 機 ECU MATLAB/Simulink ソフト ウェア ソフトウェア 詳細設計 詳細設計 示すように、モデルベース開発において 一般的な HIL -S 環境 SIL-S の 機能単体 機 能 単 体の ソフトウェ ア検 証 ソフトウェア検証 CarSim MATLAB/Simulink は、 車両仕様定義 ・ECU 仕様定義の マイコンシミュレータ フェーズで、MATLAB/Simulinkによるモ 制御ロジック全体 を SIL-S マイコンシミュレータ C言語化HW モデル で実行検証 生成 コード 生成 コード マイコンシミュレータ デルで仕様定義が行われます。 この段 設計 Design 階では、CarSim をMATLAB/Simulinkに 接続することで、 車両挙動をシミュレー 検証 Validation M P U実装 MPU実装 レガシーコード ※高 速 動 作 検 証 を 要求する場 合、 MATLAB/Simulink モデルをC 言語化して ネイティブ実行 ションで確認しながら仕様定義が行えま 図8:CarSim 連携を適用する場合の 自動車 V 字プロセスへの適用箇所 す。 次のソフトウエア詳細設計 ・コード生成 のフェーズでは、機能検証のために、マ 【 CarSim 製品情報】 イコンシミュレータ+ MATLAB/Simulink CarSim ソフトウエアパッケージの構成 +CarSimを連携させたSIL-S環境を利用 ・車両運動モデル(実行プログラム dll :単独実行用とMATLAB/Simulink 上での実行用) ・車両諸元 ・条件入力、 データベース管理、 計算実行、 結果出力の操作画面 GUI ソフト することができます。 ・シミュレーション結果のグラフ表示ソフト、アニメーション表示ソフト ただし、 このフェーズでは、システムの 車両モデルと環境モデル 全てが完成している訳ではなく、 機能の ・27 自由度 4 輪フルビークルモデル ・1 軸及び 2 軸のトレーラ牽引モデル(オプション) 一部をマイコンシミュレータで動作検証す るケースが多くなります。また、関数単体 ・非線形タイヤ、 サスペンション、 ステアリング系モデル(マップ) ・各種の駆動方式(FF、 FR、 4WD)、 AT/MT、 デフを選べるパワートレーン系モデル に着目したホワイトボックステストも、 この ・4 輪独立のブレーキ系モデル ・オープンループとドライバーモデルでのステア、スピードコントロール フェーズで行われます。 MPU に実装後の検証 ( Validation)の フェーズでは、前述のSIL-S や一般的な ・三次元道路コース生成機能(バンク、 曲線、 アップダウン、 μ変化自由) ・空力抵抗や横風の入力を可能にするAerodynamics 特性(マップ) ・広範な運転 ・環境条件、 車両パラメータの中途変更可能なイベントドリブン機能 等々、 クルマの運動性能評価に必要なモデル ・機能を完備しています。 HIL-S の環境を使用して、要求仕様であ 基本的な特長 るMATLAB/Simulink モデルをリファレン ・非線形挙動まで解析可能な中規模モデルで、高速で安定したシミュレーションが可能 ( パソコン上でもほとんどのケースでリアルタイムより早く計算が終了する) スとして、 ECU システムの動作検証が行 われます。最終の実車テストの前に、机 上でシミュレーションによるシステム動作検 証を進められるかが、開発 ・検証の効率 を高めるための要となります。 ・GUI 入力画面が完備していて、 パラメータや解析条件の変更 ・追加が容易 ・シミュレーション結果をすぐにグラフやアニメーションで確認することが可能 ・解析事例やサンプルデータが豊富に入っていてすぐにシミュレーション計算が可能 ・内製モデルの代替で1 人 1 台ずつの使用を想定した、リーズナブルな価格設定 主な用途 ・車両の操縦安定性、 制動性能、 加速性能の机上検討 ・車両制御システム開発での制御ロジックの検討 ・検証 ・研究開発用ドライビングシミュレータの車両運動モデル ・車両運動やその制御理論、 ドライバーモデル、 ITS 分野での研究と教育 利用環境 : まとめ ・Windows PC(Windows2000 / XP) CarSim についてのお問い合わせ先 : 本特集では、 車両運動シミュレーショ ンの現状と、 ガイオの SIL-S ソリューショ ンをご紹介しました。 複雑化する自動車 ECU ソフトを効率的 バーチャルメカニクス 永瀬 〒 467-0003 名古屋市瑞穂区汐路町 3-2-4 伊藤ビル 2F Tel: 052-853-7309 Fax: 052-853-7261 E-mail: [email protected] URL: http://www.virtualmechanics.co.jp/ に開発するための手法として、机上での シミュレーション技術を利用した、実車テ CarSim やMATLAB/Simulink と連携したSIL-S 検証環境を提案します ガイオ ・テクノロジー 営業部 岩井 陽二 スト前のシステム検証が注目されていま す。 ガイオでは、 マイコンシミュレータ ( ISS)を利用した組込みソフト検証環境 「 No.1 システムシ ミュレータ」を提供しています。 自動車 ECU ソフト検証に対しては、 モジュール単体テスト 今後も、ガイオ・テクノロジーは、自動 ツール 「 カバレッジマスター」を始め、モデルベース開発に適応したシステムシミュレーショ 車業界からのご要求に応える開発システ ン、 MATLAB/Simulink 連携、CarSim 連携などの SIL-S 環境を提供しています。開発を効 ムを提案して参ります。 率化する手法として、 是非ご検討下さい。 GAIO CLUB 2006 Vol.1 5
© Copyright 2026 Paperzz