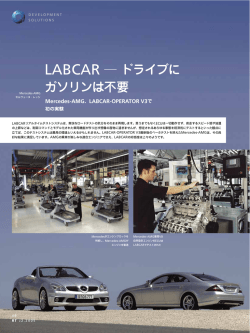
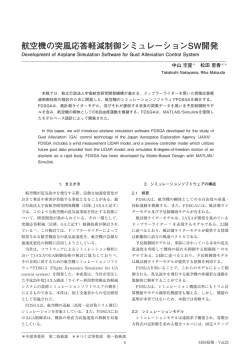
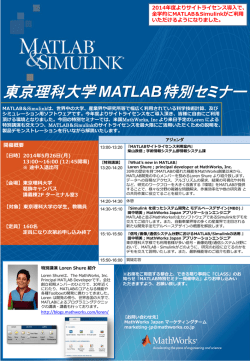
SimMechanics 3 メカニカルシステムのモデリングおよびシミュレーション SimMechanics™ はSimscape™ を拡 張 し、Simulink®の環境内で3 次元メカニカ ルシステムのモデリングを行うことができま す。 このマルチボディシミュレーションツー ルを使用すれば、方程式を導出してプログ ラミングしなくても、 システムの構造を反映 するボディ、 ジョイント、制約、 および力要素 から成るモデルを構築することができます。 3 次元アニメーションの自動生成により、 シ ステムダイナミクスを可視化できます。ま た、質量、慣性、制約および3 次元ジオメト リを備えたモデルを複数のCADシステム からインポートすることも可能です。 SimMechanics のモデルは Real-Time Workshop®を使用してCコードに変換で きるため、ハードウェアプロトタイプの代わ りにHardware-in-the-loop(HIL)テストで 組込みコントローラをテストすることができ ます。 SimMechanicsは、 アクティブサスペンショ ン、ロボット工学、手術機器、着陸装置など のさまざまなシステムの開発に利用可能で す。SimMechanicsは他のMathWorks 物 理モデリング製品と連携し、 マルチドメイン 物理システムでの複雑な相互作用のモデリ ングを可能にします。 SimMechanicsによるロボットアームのモ デル。SimMechanicsモデル(下)の色付け されたブロックは、3 次元図(右)の色付けさ れた部分に対応します。 主な機能 ■ 3 次元剛体メカニカルシステムの構築のためのモデリング環境 を提供 ■ モーション解析と力計算のためのシミュレーションモード ■ 3 次元剛体のジオメトリを使用したメカニカルシステムダイナミ クスの可視化とアニメーション ■ SimMechanics Linkユーティリティによる、Pro/ENGINEER® およびSolidWorks® CADプラットフォームへのインタフェー スとその他のCADプラットフォームへのリンク用APIの提供 ■ モデルのCコードへの変換機能(Real-Time Workshopを 使用) ■ Simulinkとの統合により、高精度の非線形プラントモデルおよ び制御システムを単一の環境で開発することが可能 メカニカルシステムのモデリング SimMechanicsでは、物理的なシステムを 組み立てるように3 次元メカニカルシステ ムのモデルを構築することができます。ボ ディ、座標系、ジョイント、および力要素を 使用して、他のSimulinkモデルに直接接 続できるメカニカルシステムを定義します。 このアプローチは、SimMechanicsの機能 を拡張すると共に、既 存のSimulinkモデ ルの再利用性を向上させます。Simulinkと SimMechanicsのブロックを組み合わせた モデルをサブシステムとして保存すると、多 くのアプリケーションで再利用することがで きます。 サブシステムの例として、次のようなものが 挙げられます。 ・Simulinkのルックアップテーブルを使用 した非線形スプリング ・補助翼や方向舵などの航空宇宙コンポー ネントに圧力分布を付加した空力抵抗モ デル ・安定化機構とコントローラというような自 動車のアクティブサスペンションサブシス テム ・飛行機や地上車のタイヤモデル SimMechanicsのセンサブロックを使用し て、力、 トルク、速度などの物理量の値を測 定し、 それらの信号を標準のSimulinkブロッ SimMechanicsによるStewart Platformのモデル。 コントロー ラのSimulinkモデルはSimMechanicsモデル(右上)に直接接 続しています。脚モデル(右下)は6 本の脚すべてで再利用されて います。 プロット (上)は、 プラットフォームの角度とアクチュエータ に必要な力を示します。 クに渡すことができます。アクチュエータブ ロックにより、Simulink 信号をいずれかの 物理量の値に割り当て、 メカニカルシステム を作動させることができます。 また、 センサブ ロックとアクチュエータブロックを使用して、 Simulinkで開発した制御アルゴリズムを SimMechanicsモデルに接続することも可 能です。 コントローラの設計には、SimMechanics で開発した非線形プラントモデルを使用す ることができます。また、Simulink Control Design™を使用して非線形モデルから線 形プラントモデルを抽出することにより、線 形制御理論を使用してコントローラを設計 することも可能です。 メカニカルモーションの シミュレーションと解析 SimMechanicsモデルをシミュレーション することにより、運動学的制約を課し、力や トルクを加え、結果として生じるモーション や力を測定することができます。また、電気 モータ、 ボールネジ、油圧シリンダ、 エンジン といったアクチュエータの開発およびテスト を行なうことも可能です。 SimMechanicsはメカニカルシステムの シミュレーションのために設 計された Simulinkのソルバテクノロジーを追加しま す。SimMechanicsは4つのモーション解 析モードをサポートします。 ・順動力学:モーションの原動力となるア クチュエータに力やトルクを加え、結果と して生じるシステム全体のモーションを 計算。 ・逆 動力学および運動学解析:ユーザが 定義したモーションを実現するためにア クチュエータから与えなければならない 力やトルクの決定。 ・トリミング:線形化やシステム解析に使 用する定常状態となる平衡点の確認。 ・線 形化:駆動力、ジョイント/ 制約条件 設定、および初期状態での摂動に対する システムの応答を推測する線形モデルの 抽出。 CADからSimMechanicsにインポートし たピストンのモデル。ピストンのCADモデ ル(右上)はXMLファイル形式で保存した 後、SimMechanicsにインポートされてい ます。3 次元図は、CADシステムから自動 的にエクスポートされるSTLファイルから 生成されます(右) 。 これらの解析モードを組み合わせて、 メカニ カルシステムのパフォーマンステスト、適切 な駆動システムの選択および最適な制御手 法の開発が可能になります。 SimMechanicsは、メカニカルモデルの3 次元図を自動的に作成し、 シミュレーション の実行中にアニメーションで表示すること が可能です。3 次元図で可視化されるジオ メトリは、モデルで定義した座標系から生成 できるほか、実際の3 次元ジオメトリをモデ ルのボディに関連付けることもできます。ま た、 システムを理解する助けとして、各パー ツの質量と慣性を表す楕円を表示すること も可能です。 シミュレーションの実行中に生成されたア ニメーションを別のファイルに保存すること により、 シミュレーションから切り離してアニ メーションを表示させることができます。標 準のMATLAB®グラフィック関数を使用し て、可視化機能を拡張することができます。 CAD システムから SimMechanicsへアセンブリを エクスポート SimMechanics Linkを使用することによ り、CADア センブリからSimMechanics モデルを自動 生 成することができます。 SimMechanics Linkは、重 要なデータと パーツの組合わせ情報を、SimMechanics にインポート可能なファイル形式でエクス ポートします。アセンブリの各パーツの質 量と慣性モーメントは、SimMechanicsの 剛体に変換されます。CADアセンブリの ジオメトリはジオメトリファイルに自動的 に変 換され、SimMechanicsの適 切なボ ディに関連付けられます。CADアセンブリ に含まれるパーツの組合わせの定義は、 SimMechanicsモデルの適切なジョイント に変換されます。 SolidWorksとPro/ENGINEERのモデルに ついては、 CADアセンブリをSimMechanics にインポート可能なXMLファイルとして保 存するプラグインをインストールすることが できます。その他のCADシステムについて は、SimMechanics Linkによって、ご使用 のCADシステムのAPIに接続するための APIが提供されます。 SimMechanics Linkは www.mathworks.com/products/ simmechanics/download_smlink.html (英 語)からダウンロードできます (SimMechanics Linkを使用するにはMATLABのライセン スが必要です) 。 www.mathworks.co.jp SimMechanicsモデルの Cコードへの変換 SimMechanics モデ ルをCコードに変 換することで、Simulinkのアクセラレータ モードを使用してシミュレーション時間を 短縮することができます。また、Real-Time Workshopを使 用してSimMechanicsモ デルをCコードに変換することも可能です。 これにより以下のことが可能となります。 ・リアルタイムでモデルを実行し、HILテス トを実行 ・モデルを他のシミュレーション環境に統合 ・SimMechanicsモデルをスタンドアロン シミュレーション用にコンパイルし、パラ メータ検討やモンテカルロシミュレーショ ンといった解析を高速化 MATLAB/Simulinkでの マルチドメイン物理モデリング 動作環境 SimMechanicsには、以下の製品が必要 です。 ・MATLAB® ・Simulink® ・Simscape™ 動作環境の詳細につきましては、 www.mathworks.co.jp をご覧ください。 関連製品 ・SimDriveline™ メ カニカルな動力伝達システムのモデリ ングとシミュレーション ・SimElectronics™ 電 子・電気機械システムのモデリングと シミュレーション ・SimHydraulics® SimMechanicsは、メカニカルシステムを 油 圧システムのモデリングとシミュレー シミュレーションするための拡張機能を ション 提 供します。そのため、物 理 信 号 接 続を 使用して物 理プラントモデルを作 成し、 ・SimPowerSystems™ Simulinkで信号フローをモデリングした制 電 力システムのモデリングとシミュレー 御モデルに直接接続することができます。 ション SimMechanicsモデルは、用途とドメイン が 特 定された、他のMathWorks 製の物 ・Simulink Parameter Estimation™ 理モデリングツールにも接続できます。こ テ ストデータを用いて、モデルのパラメー れにより、マルチドメイン物理システムでの タを推定 複雑な相互作用のモデリングを可能にしま す。 また、MATLABを使用して、モデルのパ ラメータ化、シミュレーションテストの自動 化、出力データの解析、およびシステム性能 の最適化を行うこともできます。その結果、 システム全体(マルチドメイン物理プラント とコントローラの両方)をMATLABおよび Simulink 環境でテストすることが可能とな ります。 © 2009 The MathWorks, Inc. MATLAB and Simulink are registered trademarks of The MathWorks, Inc. See www.mathworks.com/trademarks for a list of additional trademarks. Other product or brand names may be trademarks or registered trademarks of their respective holders. 91681v00 07/09
© Copyright 2026 Paperzz