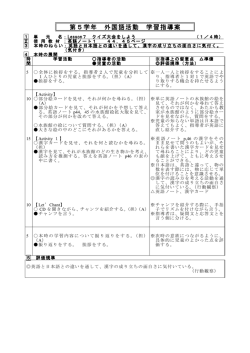
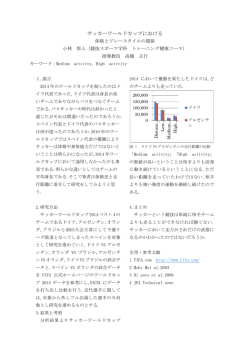
安全・親和ロボットシステム融合研究課題 大阪大学 生体ゆらぎを用いた内視鏡手術支援ロボット 内視鏡手術とは 近年,お腹に開けた小さな穴から,お腹の中を 見るための内視鏡と手術器具を挿入して外科的 処置を行う内視鏡手術が盛んに行われています. 開腹手術に比べ傷口が小さく痛みが少ないうえ, 入院期間も短い手術です. 図1:内視鏡手術におけるロボットの役割 この研究は,内視鏡手術において人間のカメラ助手が行っていた内視鏡の把持・位置決めをロボット に行わせようとするものです(図1).ロボットは,人に比べ精密な動作が得意なうえ疲れません.我々 は手術にロボットを導入することで安定した視野を正確に医師に提供し安全で効率的な医療の実現を 目指しています. 生体ゆらぎを用いた内視鏡手術支援ロボットの概要 現在,我々の開発中のロボット(図2)は, パラレルメカニズムと水圧駆動型アク チュエータで構成されており,小型軽量 で医療機器として高い安全性と清潔性を 兼ね備えています.ロボットの操作方法 としてジョイスティックインタフェースによ る操作と,自動操縦を研究しています. 特に自動操縦では,生体ゆらぎから学ん だアトラクタ選択の枠組み(「ゆらぎ方程 式」)をロボット制御に応用した内視鏡の 新しい自動位置決め方式を研究していま す. パラレルメカニズム 図2:内視鏡手術支援ロボット. 6本の棒状のアクチュエータが並行に伸び縮みする パラレルメカニズムで安全に動作.各アクチュエータ は外部から送られてくる水の圧力で動くため,清潔. 小型軽量でロボット部の重量は約580グラムです. ゆらぎで内視鏡ロボットを制御する dx = f (x ) ⋅ activity + η dt 内視鏡の視野 (ゆらぎ方程式) x : システムの状態 → 内視鏡の視野を表現する変数です f (x ) : システムのダイナミクス→ 視野を制御するためのアトラクタを持った基本構造です activity : システムの活性度 → 手術をするのに適している視野かどうかを表す指標です η : ノイズ → 適切な視野を確率的に探索するためのゆらぎ要素です システムの状態 高 activity 低 術者が心地よいと感じる視野が得られた時 (activity :高) →現状の視野を維持 術者が心地よいと感じる視野が得られない時(activity :低) →適切な視野を探索 連絡先:[email protected] 大阪大学 ハードウェア設計:内視鏡ロボット ソフトウェア設計:ゆらぎ制御 人と親和性の高い(安全・清潔な)水圧駆動型 リニアアクチュエータ(×6本)を開発 圧縮空気により「伸び」方向に常に力 水を内部に入れることで「縮み」方向に動く 人頸部の構造を模擬したパラレルメカニズム 小型・軽量、占有領域小、安全性大 dx = f (x ) ⋅ activity + η dt 状態 x を内視鏡ー鉗子先端間の距離とする 内視鏡ー鉗子先端間の距離の最大値と最小値 をポテンシャルの谷にもつ関数を設計し、ポテ ンシャルの谷へ向かうベクトルとしてf(x)を設計 activity を内視鏡に映る鉗子先端の位置の散ら ばり sd の関数として設計 f(x)の設計 activityの設計 アクチュエータ f(x) = − dU ( x ) dx α(sd) U(x) R α ( sd ) = 1 ⎛ sd ω n ⎞ R + ⎜⎜ − ⎟⎟ ⎝ ω n sd ⎠ 水 2 2 圧縮空気 4 U ( x) = ∑ ci x i i =0 x(t ) x 水圧駆動型アクチュエータ パラレルメカニズムで構成した 内視鏡ロボット 主要成果:内視鏡ロボット ωn 0 シリンダ(アクチュエータドライバ) sd: sd 内視鏡に映る鉗子の位置の散らばり ωn: 目標となる散らばり アトラクタ 主要成果:ゆらぎによる内視鏡自動位置決め 人間の熟練カメラ助手の場合 術者& カメラ助手 内視鏡―鉗子 先端間の距離 内視鏡に映る 鉗子の散らばり 術者&ロボット (ゆらぎ制御なし) 一般的なロボットのカメラ助手の場合 内視鏡―鉗子 先端間の距離 ブタの腹腔鏡下胆嚢摘出術の様子 (内視鏡ロボットはジョイスティックで操作) SD of ANGLE (deg) これまでに, ・腹腔鏡下胆嚢摘出術 3例 ・腹腔鏡下直腸前方切除術 1例 ・腹腔鏡下幽門側胃切除術 1例 計5例のブタによる生体実験を 行い,全て成功. 術者&ロボット (ゆらぎ制御あり) ゆらぎを用いた本ロボットの場合 30 30 30 内視鏡―鉗子 先端間の距離 Average DISTANCE 25 25 20 20 60 60 40 SD of ANGLE 10 10 5 0 0 20 00 150 150 160 160 170 170 180 180 190 190 200 200 210 210 220 220 230 230 240 240 Time (sec) ゆらぎを用いると,ロボットの動きが熟練のカメラ助手の 内視鏡位置決め行動と非常によく似た挙動になった ゆらぎプロジェクト 2025 最終年度 2015 ~2012 ~2010 量産・普及 術者の心地よさを推定・フィードバックするゆらぎ制御の確立 製品化 (年間売上高20億円見込, (300病床数以上の病院1200施 世界規模では100億円市場) 計10例以上の動物実験 計20例以上の動物実験 設,国内年間合計10万症例に対 し,30%以上の普及率を目指す) 2008 安全性試験・薬事申請・臨床応用開始 研究開発ロードマップ(数値目標) 80 80 内視鏡に映る40 20 鉗子の散らばり 15 15 5 100 100 -20 -20 250 250 Average DISTANCE (mm) 内視鏡に映る 鉗子の散らばり
© Copyright 2026 Paperzz