Politecnico di Milano
Fondamenti di Automatica (CL Ing. Gestionale) a.a.2014-15
Prof. Silvia Strada
Prima prova intermedia 28 Novembre 2014
Nome e Cognome: . . . . . . . . . . . . . . . . . . . . . . . . . . . Matricola . . . . . . . . . . . . . . . . . . . . . . . . . . .
Firma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
•
•
•
•
•
•
Durata della prova: 1 h e 30 min.
Numero di esercizi: 4
Punteggio: il numero di punti `e indicato a fianco di ciascun esercizio
Consegna: esclusivamente il presente fascicolo, senza fogli di brutta
Utilizzare esclusivamente i fogli di brutta/carta semilogaritmica forniti dal docente
Unico ausilio permesso: una calcolatrice non programmabile - tutti gli altri dispositivi elettronici
vanno messi, spenti, sul banco - non `e ovviamente consentito consultare libri,appunti,dispense - Non
`e consentito scrivere a matita
ESERCIZIO 1
Si consideri il sistema dinamico LT I descritto dalle seguenti equazioni:
punti: 8 su 32
x˙1 (t) = −3x1 (t) + x2 (t)
x˙2 (t) = −2x2 (t) − u(t)
x˙3 (t) = −x3 (t) + u(t)
y(t) = x3 (t)
1. Si determinino i modi del sistema.
2. Si calcolino il movimento libero dello stato e dell’uscita a partire dalle condizioni iniziali
x1 (0) = x2 (0) = 0 x3 (0) = 1.
2
3. Si scrivano i comandi Matlab per definire il sistema e trovare il movimento libero dello stato e
dell’uscita a partire dalle condizioni iniziali
x1 (0) = x2 (0) = 0 x3 (0) = 1.
ESERCIZIO 2
Dato il sistema dinamico LT I descritto dalle seguenti equazioni:
punti: 7 su 32
x˙1 (t) = −2x1 (t) + x2 (t) + u(t)
x˙2 (t) = −3x2 (t) + 3u(t)
y(t) = x2 (t)
1. Si determini l’espressione analitica della risposta forzata in uscita y(t) quando l’ingresso `e
u(t) = imp(t).
3
2. Si verifichi la correttezza dell’espressione trovata al punto precedente applicando, se possibile, i teoremi del valore iniziale e finale.
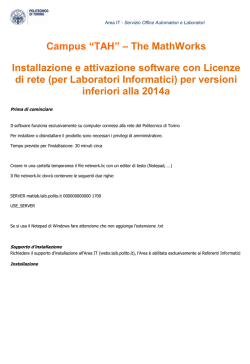
3. Dato lo schema a blocchi mostrato in figura 1,
G(s)
+
Figure 1. Schema a blocchi
dove
H(s) =
1
1
W (s) =
s+2
s+4
e G(s) `e la funzione di trasferimento da u(t) a y(t) del sistema di partenza, si calcoli la funzione di
trasferimento da v(t) a y(t).
4
ESERCIZIO 3
punti: 7 su 32
Sono date le equazioni di stato di un sistema dinamico non lineare:
{
x˙ 1 (t) = −x1 (t) + 2x2 (t) + u2 (t)
x˙ 2 (t) = −2x1 (t) − x2 (t) + x22 (t)
1. Si determinino gli stati di equilibrio del sistema in corrispondenza dell’ingresso u(t) = u = 0.
5
2. Si linearizzi il sistema nell’intorno dello stato di equilibrio non nullo.
3. Si esamini la stabilit`a del sistema linearizzato cos`ı ottenuto e, sulla base di questo risultato, si discuta
la stabilit`a dello stato di equilibrio del sistema non lineare.
6
ESERCIZIO 4
punti: 7 su 32
Si consideri il sistema dinamico a tempo discreto descritto dalla funzione di trasferimento
G(z) = 2
z−1
2z 2 + 3z − 2
1. Si discuta la stabilit`a del sistema.
2. Si ricavi l’espressione analitica della risposta forzata del sistema allo scalino unitario.
7
3. Si scrivano i comandi Matlab per il tracciamento del grafico della risposta forzata del sistema allo
scalino di cui al punto precedente.
8
DOMANDE
-0.125=risposta errata, 0=risposta non data, +0.5=risposta corretta
Ogni quesito ha una sola risposta corretta.
1. La funzione di trasferimento di un sistema dinamico `e:
10(s + 50)
G(s) = 2
(s + 60s + 500)
Se l’ingresso `e uno scalino unitario, il valore per t → ∞ di y(t) `e
A.
B.
C.
D.
50
1
100
nessuna delle risposte precedenti
2. Si consideri l’equazione differenziale y¨ + 2y˙ + y = u dove y(0)
˙
= y(0) = 0 e u(t) = sca(t). I poli della
funzione di trasferimento tra u(t) e y(t) sono
A.
B.
C.
D.
−1,
−1,
−1,
−1,
+1
−1
+1
0
3. L’ equazione caratteristica associata alla matrice della dinamica di un sistema LTI continuo
`e s3 + 4ks2 + ks + 10 = 0. L’intervallo dei valori di k per cui il sistema `e asintoticamente stabile `e
√
A. − 10 < √
k<0
10
B. 0 < k <
2
√
10
C. k <
2
√
10
D. k >
2
4. La Trasformata di Laplace del segnale w(t) = e−4t + 2et , t ≥ 0 `e
3s − 9
A. W (s) = 2
s − 5s + 4
3
B. W (s) = 2
s + 3s − 4
3s + 7
C. W (s) = 2
s + 3s − 4
3s2 + 7s
D. W (s) = 2
s + 3s − 4
5. Dato il sistema discreto LTI con funzione di trasferimento H(z) =
forzata all’istante k = 5, quando l’ingresso `e u(k) = 2sca(k), `e
A.
B.
C.
D.
y(5) = 20
y(5) = 0
y(5) = 4
y(5) = −8
6. In seguito ai comandi Matlab >> h = tf ([1 0], [1 2 1]);
A.
B.
C.
D.
10z − 8
, il valore della risposta
z3
0
∞
10
1
9
>> mu = dcgain(h), la variabile mu vale
© Copyright 2026 Paperzz