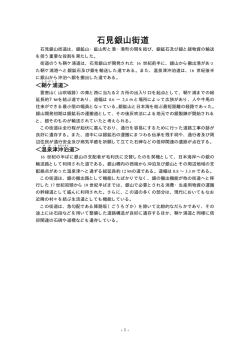
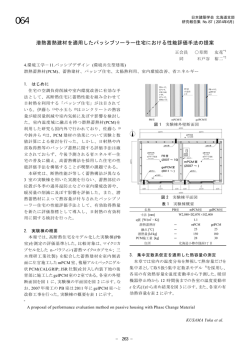
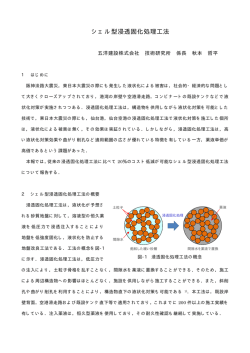
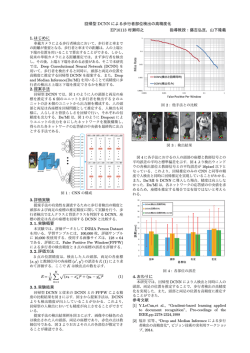
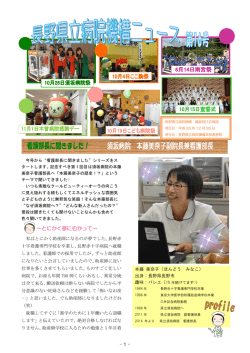
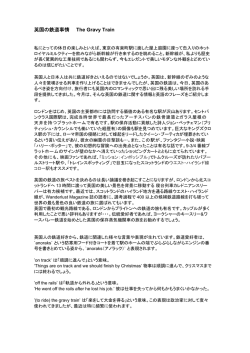
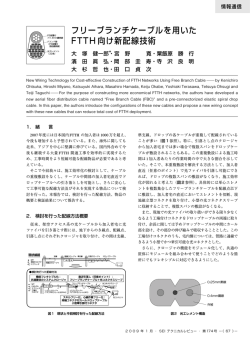
TER-14-010,PHS-14-010 軌道回路ごとの走行時分を考慮した確率的列車運行シミュレーション 渡辺裕太郎*,増間義樹,富井規雄(千葉工業大学),落合康文( 小田急電鉄) Stochastic Train Traffic Simulation considering Running Times of Block Sections Yuutorou Watanabe*, Yoshiki Masuma, Norio Tomii (Chiba Institute of Technology) Yasufumi Ochiai (Odakyu Electric Railway Co. Ltd.) Abstract We introduce a train traffic simulation algorithm that can estimate not only arrival and departure times of trains but their detailed behavior between stations. The algorithm is designed as an extension of the longest path simulation algorithm so that it can deal with running times of each track circuit. We have also introduced an idea to dynamically change the weights of arcs based on estimation of the signal aspects. Thus, we can simulate trains ’ behavior between stations reflecting the interaction between consecutive trains. We specified the weight of an arc as a probabilistic variable and by obtaining the distribution from the actual train operation records, we can realize the probabilistic train traffic simulator which works very fast. キーワード:鉄道, シミュレーション, モンテカルロシミュレーション, 頑健性, 軌道回路 (railway, simulation, Monte Carlo simulation, robustness, track circuit ) 1. はじめに 都市圏の鉄道においては,ラッシュ時に日常的に発生す る小規模の遅延が問題となっている (1) 。そのため,鉄道会 社は,それらの遅延がなるべく発生しないように,また,発 生した遅延が拡大したり,他の列車に伝播したりしないよ うにすることに留意している。 遅延がなるべく発生せず,また遅延が拡大・伝播しにくい 列車ダイヤを「頑健な列車ダイヤ」と呼ぶ。鉄道会社は,頑 健な列車ダイヤを実現するためにさまざまな試みを行なっ ている。具体的には,信号システムの変更(信号システム そのものの取替,閉そくの細分化,閉そく境界位置の変更, 信号現示系統の改善など),列車の停止位置の変更(駅で の停止位置,駅間で機外停止となる場合の停止位置など), 列車ダイヤの修正(時刻の修正,番線の変更,列車種別の 変更,車両運用計画の変更,乗務員運用計画の変更等),車 両の改善(ワイドドア車の導入等),駅等でのオペレーショ ンの変更(ホーム要員の増強,発車等の合図伝達方式の改 善など)がありうる (2) (3) 。しかし,これらの試みを採用す る際には多額の投資を必要とすることも多いため,どのよ うな試みを採用するのが効果的であるのかについて,事前 に十分な検討を行なう必要がある (4) 。 現時点では,どのような方策をとるのが遅延対策の面で 適切であるのかを評価することについてのコンピュータに よる支援は十分とは言えず,この点についての支援が求め られている。そのためには,列車ダイヤや設備に従って列 車を走行させた時の状況を模擬することによって,とりう る方策の有効性を事前に評価することのできるシミュレー タが有用である。 このシミュレータは,次のような要件を満たす必要がある。 ( 1 ) 駅間の列車の挙動を模擬できること 列車の駅間の挙動は,前方の列車の影響を受けた 信号現示など,その時の状況によって異なる。また, 状況によっては,駅の間で停止(機外停止)すること もあり,その結果,遅延が拡大することもある。シ ミュレーションにあたっては,駅の着時刻と発時刻 を算出するだけでなく,このような駅間における列 車の挙動を模擬できることが必要である。 ( 2 ) 確率的に列車運行を模擬できること 列車の動きは,常に同じではない。同一種別の列 車であっても,運転士,天候,その時の遅延の状況 等によって微妙な差異がある。列車ダイヤの平均的 な性質を知るためには,シミュレーションを繰り返 し実行し,その結果の平均(期待値)を採用すると いう手法(モンテカルロシミュレーション)が有効 である (5) (6) 。そのためには,列車運行を確率的に模 擬できる必要がある。 ( 3 ) シミュレーション速度が高速であること モンテカルロシミュレーションを行なうためには, シミュレーションを繰り返すことが必要になる。そ のため,1 回のシミュレーションが高速に実行され る方式を採用することが必要である。 ( 4 ) ダイヤ・設備を変更した時の列車運行の状況を模 擬できること 列車ダイヤの頑健性を向上させることを目的とし た前述のさまざまな施策を導入した際の列車運行の 状況を模擬できることが求められる。 列車運行のシミュレーション方式としては,次節で述べ るように,イベントドリブン方式,最長経路アルゴリズム に基づく方式,連続型シミュレーションなどの方式が提案 されている。本研究では,駅間での列車の動きを高速にシ 1/6 ミュレーションすることを可能とするために,最長経路ア ルゴリズムによる方式を軌道回路レベルに拡張する方式を 提案する。 2. 関連研究 〈2・1〉 列車運行シミュレーション 計画ダイヤと設備 (線路,車両性能,必要に応じて信号)に関する情報が与え られた時に,なんらかの外乱が発生したと想定した場合に, 列車の運行を模擬することによって,その外乱が列車運行 にどのような影響を与えるのかを予測することを,列車運 行シミュレーションと呼ぶ。 列車運行シミュレーションは,さまざまな場面において 用いられる。例えば,信号設備等の評価検討 (7) ,駅設備の 評価検討 (8) など,列車ダイヤをもとにした設備の評価に用 いられる。また,運転整理案を作成するアルゴリズムにお いて,列車運行シミュレーションによる予測結果を修正す るという形式のアルゴリズム (9) が用いられることが多い。 シミュレーションの粒度としては,駅の着・発のみをシ ミュレーション対象とするもの(macroscopic simulator と 呼ぶことにする)と,駅間の列車の挙動(列車の駅間での速 度,力行,惰行,ブレーキ等の列車の操縦方法を含む)まで をシミュレーション対象とするもの(microscopic simulator と呼ぶことにする)が存在する。また,粒度の違いを反映 して,処理速度,必要とするデータ,シミュレーション結 果の粒度等の点で,それぞれ次に述べるような得失がある。 〈2・2〉 イベントドリブン方式 列車の駅への到着事 象,駅からの発車事象をイベントとし,コンピュータ内部 に保持した仮想的なクロックを進めて行き,その時に生起 可能となったイベントを生起させることを繰り返すことに よって,列車運行シミュレーションを行なう。列車運行シ ミュレーションのみならず,一般に広く用いられている方式 である。macroscopic simulator に分類される。処理速度は, 次に述べる最長経路アルゴリズムによる方式よりは遅い。 〈2・3〉 最長経路法による方式 列車ダイヤを,ある種 の有向グラフで表現する。具体的には,ある列車のある駅 への到着・ある駅からの発車をそれぞれ一つのノードとし, ノード間の生起順序に関する制約をアークとする。アーク には,その両端のノードに関連づけられた 2 つの事象(イ ベント)が生起する間に最低限必要な時間を重みとして付 す。仮想的に設けたノード(開始ノード)から,それぞれの ノードへの最長経路の重みを算出することによって,列車 運行シミュレーションを行なうことができる (10) 。これは, 工程管理等に用いられる PERT - Program Evaluation and Review Technique の考え方の応用である。最長経路法に基 づくシミュレーション方式は,イベントの生起順序があら かじめアークによって固定されているため,生起順序をそ の都度判断する必要がない。そのため,イベントドリブン 方式にくらべて高速なシミュレーションが可能である。粒 度としては,macroscopic simulator に位置づけられる。 〈2・4〉 連続型シミュレーション 列車を(通常は)一 つの質点と考え,その質点の動きを表現した運動方程式に よって,時間の進行にともなって変化する列車の速度,位 置を求めて行く方式である (11) (12) 。列車の(ノッチごとの) 性能,ブレーキ時の減速度,信号建植位置,信号現示遷移 データ,曲線,勾配,分岐器等による速度制限箇所と制限 速度の値等の情報が必要になる。 連続型シミュレーションは,信号システムの検討に用い られることが多い (7) 。また,列車の駅間の所要時分(基準 運転時分)を求める際にも,この方式が用いられる (13) 。 連続型シミュレーションでは,駅間の列車の挙動を詳細 に模擬することが可能である。また,運転士の操縦方法を組 み込んで,運転士の操縦方法の差異を考慮したシミュレー タを構築するように発展させることも可能である (14) 。ただ し,非常に細かい単位でクロックを進めていくため,前述 のイベントドリブン方式,最長経路アルゴリズムによる方 式と比較すると処理速度は遅い。 3. 軌道回路ごとの走行時分を考慮した列車運行シミュ レータ 〈3・1〉 基本的な考え方 本研究では,冒頭で述べたシ ミュレータに対する要件を満たすために,あらたなシミュ レーション方式を提案する。そのシミュレーション方式は, 最長経路法をもとにしながらも,軌道回路ごとに列車運行を 模擬する。すなわち,最長経路法によるアルゴリズムに対し て,軌道回路の落下・こう上事象をノードとしてあらたに設 ける。シミュレーションの粒度の観点からは,macroscopic simulation よりも細かく,microscopic simulation よりも粗 い mesoscopic simulation に位置づけられる。 軌道回路の走行に対応するアークの重みは,その軌道回 路の走行時分とする。ただし,従来の最長経路法では,シ ミュレーション中にアークの重みが変化することはないが (アークの重みは,イベント間に必要な最小の時間を表す ため,基準運転時分,運転間隔等が該当する),軌道回路 ごとのシミュレーションを行なう場合には,信号現示に対 応して走行速度が異なるため,軌道回路の走行時分に相当 するアークの重みを信号現示に応じた値としなければなら ない。 そこで,本研究では,シミュレーション途中で,先行列車 の走行位置から当該列車前方の信号機の現示を推定し,軌 道回路の走行時分に対応するアークの重みを信号現示に対 応した値に動的に変更する方式を考案した。 本稿で提案するシミュレーション方式は,高速に動作する 最長経路法をベースにしているため,ノード,アークが増え たとしても,イベントドリブン方式や連続型シミュレーショ ンと比較して,非常に高速に動作するという特長がある。 さらに,従来の駅の着発のみをノードとする最長経路法 との混在が可能であるという特長もある。すなわち,詳細 なシミュレーションを実施したい区間のみを提案方式,詳 細なシミュレーションが不要な区間は従来通りの方式によ る,などが容易に実現可能である。 〈3・2〉 ノ ー ド 前述のように,駅の着発のイベント に加えて,軌道回路の落下,こう上のイベントをノードと 2/6 する。このイベントはそれぞれ落下時刻,こう上時刻の情 報を持つ。ここで,落下とは,列車の先頭がある軌道回路 に進入した事象,こう上とは,列車の最後尾がある軌道回 路を退出した事象のことを言う (図 1)。本研究では,軌道 回路の落下のイベントに対応するノードを落下ノード,軌 道回路のこう上のイベントに対応するノードをこう上ノー ドと呼ぶ。 落下,こう上ノードの例を図 2 に示す。 図 1 軌道回路の落下とこう上のシーケンス 図 2 図 1 のシーケンスに対応する落下・こう上ノード 〈3・3〉 ア ー ク 既存のアークに加えて新たに 4 種 類のアークを追加する。アークの種類を表 1 に示す。 種別 走行アーク 表 1 アークの種類 重み 注記 既存 閉そくアーク 走行時分 列車が軌道回路境界を 通過するのにかかる時 刻 時隔 停車アーク 停車時分 既存 駅時素アーク 補正値 追加 信号アーク なし 追加 (仮想アーク) 走行アーク 追加 追加 アークの意味とその重みを以下に示す。 走行アーク ある軌道回路の落下ノードから,進行方向の 次の軌道回路の落下ノードに引き,軌道回路境界間の走 行を表現する。重みは,その軌道回路の走行に要する時 間である。 通過アーク ある軌道回路の落下ノードから,1 つ手前(外 方)の軌道回路のこう上ノードに引き,列車が軌道回路 境界を通過することを表現する。重みは,列車の先頭が 軌道回路境界に差し掛かってから,列車の最後尾がその 軌道回路境界を抜けるまでに要する時間である。 閉そくアーク ある軌道回路のこう上ノードから,その軌 道回路を次に走行する列車のこの軌道回路の落下ノード に引き,閉そくを表現する。重みは,運転時隔である。 停車アーク 駅の着ノードから,駅の発ノードに引き,駅 での列車の停車を表現する。重みは,停車時分である。 駅時素アーク ホームトラックの手前の軌道回路のこう上 ノードから,駅の着ノードに,また,駅の発ノードから, ホームトラックの次の軌道回路の落下ノードに引き,列 車の駅到着,出発を表現する。重みは,あらかじめ算出 した補正値である。着時刻の計算式を式 1,発時刻の計 算式を式 2 に示す。ここで,α,β が補正値である。 ホームトラック手前の軌道回路こう上時刻+α (1) ホームトラックの次の軌道回路落下時刻−β (2) 信号アーク ある列車のある軌道回路の落下ノードとその 軌道回路を直前に走行する列車のこう上ノードの間に設 定する。信号アークは,列車がある軌道回路に進入する 時に走行速度の制限をうける信号現示を知るために用い る。信号現示は,直前を走行する列車の位置によって異 なる。本シミュレータでは,信号アークを手がかりとし て,直前を走る列車の位置からその時の信号現示がどの ようになるかを決定し,その結果に応じて,走行アークの 重み(軌道回路の走行時分に対応)を動的に変化させる。 従って,ある落下ノードに対する信号アークは,その軌 道回路の入口に設置された信号機の現示の遷移パターン の数だけ設定する必要がある。ここで,信号機の現示の 遷移パターンの数とは,後述する「信号現示データ」中 の当該信号機に対して設定されている遷移パターンの中 の現示の数のことを言う。例えば,遷移パターンが,R, Y, G である時,この信号機の現示の遷移パターンの数 は,3 となる。 信号アークは,双方向のアークである。落下ノードから こう上ノードのアークの向きを正方向とし,こう上ノー ドから落下ノードのアークの向きを逆方向とする。正方 向のアークは,PERT 計算の際,列車が見ている信号現 示を判別するためだけに用いる。そのため,このアーク は,PERT の計算を行なう際には無視される。逆方向の アークは,トポロジカル・オーダリングのときのみ用い る。これは,信号アークが引かれているノードの計算が 終わっていないと列車が見ている信号現示を判別できな いためである。これらの理由により,このアークは重み を持たない,いわば仮想的なアークである。 図 3 を用いて,ある落下ノード(図 3 の軌道回路 1 の 落下ノード)に関する信号アークの設定手順を説明する。 3/6 ( 1 ) 走行アークによって,列車の進行方向に隣接し ている軌道回路の落下ノード(図 3 の軌道回路 2 の落下ノード)を見つける。 ( 2 ) この落下ノードに向けて設定されている閉そく アークの情報を用いて,先行列車のその軌道回路 のこう上ノード(図 3 の軌道回路 2 のこう上ノー ド)を参照する。 ( 3 ) そのこう上ノードから,当該落下ノードに,信 号アークを設定する。この信号アークに,信号現 示の情報を付加する。 この処理を,信号現示の遷移パターンの数だけ繰り返す。 図 3 は,軌道回路 1 の信号現示の遷移パターンが R, Y,YG,G のときの例である。ノードの中の文字は「軌 道回路番号 落下・こう上の区別」を示す。また,アーク に付した記号は,信号の現示である。図 3 は,例えば,先 行列車(列車 1)の走行位置が軌道回路 2 である時,列 車 2 に対する軌道回路 2 における信号現示は R であるこ と,列車 1 の走行位置が軌道回路 3 である時には,それ は Y であることなどを示している。 図 3 信号アークの設定手順 本研究で導入する列車運行ネットワークの例を,図 1 の 配線を基に図 4 に示す。なお,ノードの中の文字は, 「軌道 回路番号 落下・こう上の区別」,あるいは「駅記号 着発の 区別」である。白抜き文字のノード,太線のアークが,本 研究で新たに追加したものである。 図 4 本研究で導入した列車運行ネットワークの例 〈3・4〉 シミュレーションのアルゴリズム ションのアルゴリズムの概要を図 5 に示す。 図5 シミュレー シミュレーションのアルゴリズムの概要 また,列車運行シミュレーションの処理の説明を以下に 示す。 列車運行ネットワークの作成 軌道回路通過データ,実績 ダイヤを基に列車運行ネットワークを作成する。ここで, 軌道回路通過データとは,後述するように,各列車に対 して,その列車が通過していく軌道回路名称を列車の走 行に沿って並べたデータのことを言う。 初期化 ノードの時刻を初期化する。具体的には,例えば, 早発を防止したい場合には,列車の計画発時刻を,対応 するノードにセットする。 トポロジカル・オーダリング 信号アークの逆方向を用い て,トポロジカル・オーダリングを行なう。 PERT(最長経路)計算 トポロジカル・オーダ順に各 ノードへの最長経路の計算を行う。最長経路の計算途上 で,図 6 に示すように,信号アークを手がかりとして, その時刻に先行列車がどの軌道回路を走行しているかを 決定し,当該列車に速度制限を課すことになる信号現示 をノードに付加する。その信号現示の情報を用いて走行 アーク,通過アークの重みを決定する。図 6 の上の図は, 軌道回路占有情報を表している。ここでは,列車 2 が軌 道回路 2 に進入しようとするとき,列車 1 は,軌道回路 3 を走行中であるので,列車 2 が速度制限を受ける信号 現示は Y となることを示している。 〈3・5〉 入力データ 入力データについて説明する。 ( 1 ) 軌道回路通過データ 列車がその進行に沿って通過する軌道回路の名称 ( 2 ) 計画ダイヤ 列車番号,駅番号,着時刻,発時刻,番線 ( 3 ) 実績ダイヤ 列車番号,駅番号,着時刻,発時刻,番線,列車長 ( 4 ) 信号現示データ 信号現示の遷移パターン,軌道回路名称。例えば, 進行して行く列車の位置によって,当該信号機の現 示が R,Y,YG,G と遷移するとき,この信号機の 遷移パターンは,R,Y,YG,G となる。 4/6 〈4・2〉 アークの重みの決定方法 ある軌道回路に対 する実績データから走行時分の頻度グラフを作成した例を 図 8 に示す。ここに示すように「山」が 2 つ(以上)生成 される場合がある。これは,信号現示が異なる場合の走行 時分を含んでいるためである。このような場合には,この データセットから単純に走行時分推定を行なうことは適切 ではない。そこで,本研究では,実績データに対して,その 時の信号現示の推定を行ない,その結果にもとづいて,信 号現示ごとに図 8 のデータセットを分割する。そして,分 割したデータセットごとに,確率密度の算出を行なう(図 9)。これにより,その時の信号現示に合致した走行時分の 確率密度を得ることができる。 図 6 軌道回路占有状況からの信号現示の推定 ( 5 ) 駅番線軌道回路 駅番号,軌道回路名称,番線。駅の番線ごとのホー ムトラックを特定する為に用いる。 ( 6 ) 時素一覧 駅番号,着発ごとの補正値 ( 7 ) 列車種別 列車番号とその列車種別 〈3・6〉 出 力 以下のデータが出力される。 ( 1 ) 軌道回路通過データ 入力された軌道回路通過データ,実績ダイヤに対 して,シミュレーション結果を軌道回路通過データ 野形式で出力する。シミュレーション結果として,各 軌道回路の落下・こう上の時刻が付加されている。 ( 2 ) ダイヤ(予測結果) シミュレーション結果から推定した,各列車の各 駅の着時刻と発時刻。 4. 確率的シミュレータの構築 〈4・1〉 基本的な考え方 各軌道回路ごとの長期間に わたる走行実績時分から,カーネル密度推定法を用いて, その確率密度を求める。その確率密度を用いてモンテカル ロシミュレーションを行ない,列車運行の軌道回路ごとの 確率的な挙動を推定する。確率的シミュレータの概要を図 7 に示す。 図8 走行時分の頻度と確率(分割前) 図 9 データセットを分割して得られた走行時分の頻度と 確率 図 7 確率的シミュレータの概要 5. 実行結果の例 小田急電鉄小田急線の一部区間を対象に,確率的シミュ レーションを実施した。対象とした区間は,成城学園前駅 5/6 から新宿駅の上り区間で,対象列車は,始発から 8 時台ま での普通列車,急行,準急,区間準急,特急の 5 種類の列 車合計 87 本である。 軌道回路通過データ WebTID より取得した当該対象区間・ 時間帯の,軌道回路情報,列車番号,落下時刻,こう上 時刻を用いた (4) 。 計画ダイヤ 当該対象区間・時間帯の計画ダイヤを用いた。 実績ダイヤ 当該対象区間・時間帯の実績ダイヤを用いた。 モンテカルロシミュレーション回数 モンテカルロシミュ レーションの回数は,1000 回とした。 停車時分 実績ダイヤから算出した値を用いた。 初期遅延 実績ダイヤから取得した成城学園前の着発時刻 を駅ノードに与えた。 ノードの初期化 計画ダイヤから駅の計画発時刻を駅ノー ドに与えた。これは,列車が計画時刻よりも早く駅を出 発するのを防ぐためである。 実行結果を図 10 に示す。また,図 10 に対して,列車の 先頭,最後尾の位置を推定し,それらを線で結んだダイヤ 図(軌道回路ダイヤ図 (15) )を図 11 に示す。 6. おわりに 本研究では,軌道回路単位での列車運行を確率的に模擬 できる列車運行シミュレーションを構築した。今後,シミュ レーション結果の妥当性と再現精度を確認していく。また, 本シミュレータを用いて,信号システムの改良,運転士の 操縦方法の差異等が列車運行に及ぼす影響を分析するため の手法を検討して行く予定である。さらに,踏切関連設備 の機能を適切にすることへの応用についても検討を進めて 行く所存である。 図 10 軌道回路占有情報 参考文献 ( 1 ) 富井規雄編著: 「鉄道ダイヤのつくりかた」,オーム社 (2012) ( 2 ) 山村明義, 足立茂章, 牛田貢平, 富井規雄: 「首都圏 稠密運転路線における遅延改善策の検証」,J-Rail2012第 19 回鉄道技術連合シンポジウム講演論文集,No.12-79 (2012) ( 3 ) 山村明義, 牛田貢平, 足立茂章, 富井規雄: 「首都圏稠 図 11 列車の先頭,最後尾をそれぞれ結んだダイヤ図 密運転路線における遅延改善策―東京地下鉄東西線での 実施例とその検証結果」電気学会 交通・電気鉄道研究会 資料 TER-12 (2012) ( 4 ) 落合康文, 西村潤也, 富井規雄: 「WebTID データの可 視化による小田急線地下化前・後の運行状況の比較とそ の検証」,J-Rail2013-第 20 回鉄道技術連合シンポジウム 講演論文集 (2013) ( 5 ) Y. Takeuchi, N. Tomii: Robustness Indices based on Passengers’ Utilities, WCRR2006 - World Congress on Railway Research, Montreal, Canada (2006) ( 6 ) K. Ushida, S. Makino, N. Tomii: Increasing Robustness of Dense Timetables by Visualization of Train Traffic Record Data and Monte Carlo Simulation, WCRR2011-World Congress on Railway Research, Lille, France (2011) ( 7 ) 平尾裕司, 長谷川豊, 稲毛弘苗, 平栗滋人: 「列車制御 シミュレータ UTRAS の開発と信号方式の評価」,鉄道 総研報告, vol.9, No.1 (1995) ( 8 ) 佐藤章, 池田宏: 「列車ダイヤと運転設備の評価 - 新幹 線列車トラフィック・シミュレータ」,オペレーションズ・ リサーチ, vol.26, No.2, pp.102-107 (1981) ( 9 ) 富井規雄, 田代善昭, 田部典之, 平井力, 村木国満: 「利用者の不満を最小にする列車運転整理アルゴリズム」, 情処論, 数理モデル化と応用, vol.46, No.SIG2(TOM 11) (2005) (10) 安部恵介, 荒屋真二: 「最長経路法を用いた列車運行シ ミュレーション」,情処論, vol.27, No.1 (1986) (11) OpenTrack - http://www.opentrack.ch (12) RailSys - http://www.rmcon.de (13) 運転理論研究会: 「運転理論(再改訂版)」日本鉄道運転 協会 (2010) (14) 西山正紀, 富井規雄: 「運転士の操縦方法を加味した列 車群運行シミュレーション」,電気学会交通・電気鉄道研 究会資料 TER-13-049 (2013) (15) 増間義樹,富井規雄,落合康文: 「軌道回路占有情報の可 視化による詳細な列車運行状況の把握」,平成 26 年電気 学会全国大会 (2014) 6/6
© Copyright 2026 Paperzz