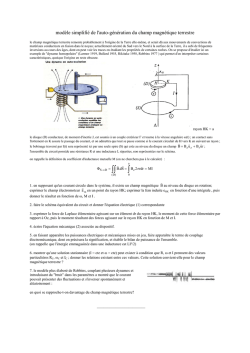
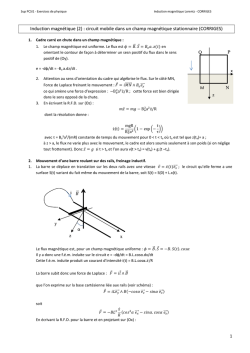
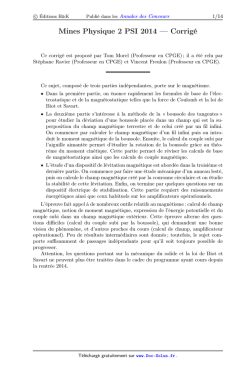
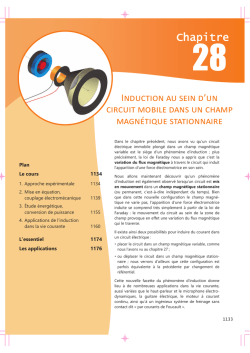
Lycée Jean Perrin - Classe de TSI 1 ICE3 - Circuit mobile dans un champ magnétique stationnaire ICE3 - Circuit mobile dans un champ magnétique stationnaire → − Nous allons étudier dans ce chapitre l’autre facette de l’induction, celle de Lorentz où qui lui a donné naissance. L’opérateur qui exerce la force F va donc devoir compenser au un circuit est mobile dans un champ magnétique stationnaire, c’est-à-dire constant dans le minimum cette force s’il veut maintenir la translation. temps. Nous en avons déjà vu des exemples lors de l’étude de la force de Lorentz, mais nous c) Equation électrique allons en profiter pour utiliser les lois de l’induction et effectuer des bilans énergétiques. Calculons d’abord le flux du champ magnétique. D’après l’orientation de la surface, le vec→ − → − → − − − teur surface est orienté selon → ez et vaut S = ax(t)→ ez . Ainsi Φ = B · S = Bax(t). On I Conversion de puissance mécanique vers électrique peut alors appliquer la loi de Faraday, comme le déplacement de la tige coupe des lignes de champ durant son déplacement : 1) Rails de Laplace dΦ dx e=− = −Ba = −Bavx (t) L’étude qui va suivre doit servir de modèle lorsqu’on aborde un système faisant intervenir dt dt à la fois le phénomène d’induction et un déplacement mécanique. On a déjà observé que l’application d’un courant dans un tel circuit permettait de mettre en mouvement la barre. Le circuit peut être modélisé électriquement en On va maintenant présenter le phénomène inverse. tenant compte de la résistance des fils et du géa) Dispositif On rappelle le dispositif employé, constitué de deux rails conducteurs parallèles, distants nérateur de tension e (attention à l’orientation d’une longueur a et reliés par un fil d’un coté, le circuit étant alors fermé électriquement de e, qui doit être dans le sens du courant). grâce à une tige mobile conductrice de masse m placée verticalement aux rails et tirée par On peut alors écrire la loi des mailles : → − 0 = Ri − e = Ri + Bavx (t) − une force constante F = F → e . x Remarque : nous avons négligé le phénomène d’auto-induction. En théorie il faudrait ajoudi ter dans le circuit électrique une bobine, et donc ajouter L dans l’équation précédente. dt Néanmoins il parait légitime ici de négliger son effet, dans la mesure où l’on a une seule spire de courant. Cependant ce ne sera pas toujours le cas (confère la deuxième partie). d) Equation mécanique L’apparition d’un courant a fait apparaître une force de Laplace, dont nous pouvons calculer sa norme. En effet, pour une tige rectiligne, la force de Laplace s’exprime → − → − − − − − par F L = i(a→ ey ) ∧ B = iaB→ ey ∧ → ez = iaB→ ex . Cette force s’oppose bien au mouvement, comme le courant est négatif. Les forces s’exerçant sur la barre sont donc : → − − L’ensemble est plongé dans un champ magnétique permanent B = B → ez . On n’oublie pas enfin d’orienter le circuit, pour fixer le sens du vecteur surface. b) Principe de fonctionnement • son poids, orienté vers le haut Avant de résoudre des équations, on peut simplement se demander quel phénomène va se • la réaction des deux barres parallèles, vers le bas produire. Le déplacement de la tige a pour conséquence l’augmentation de la surface tra• la force de Laplace versée par le champ magnétique, donc du flux magnétique Φ. Il y a donc apparition d’une force électromotrice induite, en vertu de la loi de Faraday, et donc d’un courant induit. • la force exercée par l’opérateur. La barre est alors soumise à une force de Laplace dont on peut prévoir qualitativement le sens : d’après la loi de Lenz, le courant induit crée une force qui s’oppose au mouvement L’application du principe fondamental de la 1 dynamique conduit alors à E. Van Brackel Lycée Jean Perrin - Classe de TSI 1 ICE3 - Circuit mobile dans un champ magnétique stationnaire − → − → − → − → − d→ v = P + N + F + F L soit projeté selon l’axe x : dt dvx m = iaB + F dt On aboutit donc à deux équations couplées, que l’on peut néanmoins très facilement dédvx B2 a2 Bavx et donc finalement m =− vx + F que l’on réécrit coupler. En effet i = − R dt R sous une forme canonique dvx 1 F + vx = dt τ m m Ainsi, et c’est général, pour un circuit mobile dans un champ magnétique stationnaire, la somme de la puissance de Laplace et de la fém induite est nulle : Pfem + PL = 0 2) Freinage par induction On l’a vu dans l’exemple précédent, la force magnétique qui peut apparaitre à cause du phénomène d’induction s’oppose au mouvement du conducteur qui a été la cause du phénomène d’induction. Dès qu’il y a conversion de puissance mécanique en puissance électrique, l’action mécanique de Laplace est une action de freinage, conformément à la loi de Lenz. Cela a plusieurs applications intéressantes : • Freinage par induction sur les TGV ou les camions • Récupération d’énergie lors de ce freinage, afin de convertir l’énergie cinétique du véhicule en énergie électrique (voitures hybrides) mR est un temps caractéristiques. où τ = (Ba)2 Plusieurs remarques : • la force de Laplace est ici équivalente à une force de frottements fluides, s’opposant ainsi au déplacement de la tige, conformément à notre analyse initiale. • On aboutit à une équation différentielle du premier ordre, soluble très facilement, où l’on tend vers une vitesse limite constante caractérisée, comme pour la chute libre, par l’exacte compensation entre la force de frottements et la force exercée ici par l’opérateur. A noter que lorsque le conducteur en mouvement n’est plus filiforme, la modélisation développée jusqu’à présent n’est plus valable, mais les phénomènes restent qualitativement les mêmes. Il y a apparition de courants induits à l’intérieur du conducteur, répartis dans tout le volume, et sont appelés courants de Foucault. Ces derniers provoquent, du fait du champ magnétique, des efforts de Laplace qui vont s’opposer au mouvement. On retrouve également les courants de Foucault lorsque le conducteur est fixe mais le champ magnétique instationnaire, l’exemple le plus simple étant la plaque à induction, où le courant induit provoque l’échauffement de la casserole. e) Bilan de puissance Méthode Une méthode qui s’applique toujours pour obtenir un bilan de puissance d’un système électromécanique consiste à multiplier par i l’équation électrique, et par v l’équation mécanique dvx vx = Fvx + iaBvx Appliquons cette méthode ici, on obtient ei = Ri2 = −Bavx i et m dt dEc dvx 1 où on reconnaît la dérivée de l’énergie cinétique =m vx et Ec = mvx2 . On aboudt dt 2 dEc 2 tit, en éliminant le terme de couplage Bavx i, à = Fv − Ri soit finalement dt dEc Fvx = + Ri2 dt Cette équation traduit explicitement les échanges de puissance : la puissance fournie par la force motrice exercée par l’opérateur permet d’une part de mettre la tige en mouvement (puissance cinétique) et d’autre part génère un courant qui, si le système n’est pas relié à un dipôle l’utilisant à bon escient, est simplement dissipé par effet Joule. En outre, on constate que la puissance de la fém vaut Pfem = ei = −Bavx i et que la → − − puissance des forces de Laplace vaut l’opposé : PL = F L · → v = iaBvx . II Conversion de puissance électrique vers mécanique Avant de présenter les différents types de moteurs, on va étudier un exemple qui se rapproche du rail de Laplace, et qui fait partie du quotidien de tout un chacun : le haut-parleur. 1) Principe Un haut-parleur est composé d’un aimant permanent et fixe, permettant de créer du fait de sa géométrie un champ magnétique radial d’intensité constante B. Une membrane de masse m est reliée mécaniquement à cet aimant par une suspension modélisée par un ressort de constante de raideur k. Un cylindre portant un circuit bobiné de longueur lb peut se déplacer librement dans l’entrefer de l’aimant. Lorsqu’un courant circule dans la bobine, la 2 E. Van Brackel Lycée Jean Perrin - Classe de TSI 1 ICE3 - Circuit mobile dans un champ magnétique stationnaire membrane est mise en mouvement par des forces de Laplace, et crée une onde de pression, à l’origine du son. L’application du principe fondamental de la dynamique permet d’aboutir, une fois les forces projetées selon l’axe z, à dvz m = −kz − γvz + ilb B dt A noter que, comme dans le cas précédent, si une onde de pression vient rencontrer et mettre en mouvement la membrane, une fém induite pourra être récupérée : c’est le principe du microphone ! Bien souvent les systèmes électromécaniques sont réversibles. 2) b) Equation électrique Méthode Si on connaît la résultante des forces de Laplace, ou des moments associés aux forces de Laplace, il est plus judicieux de calculer directement la fém induite en se servant du bilan de puissance établi dans la section précédente : Pfem + PL = 0 Mise en équation a) Equation mécanique Calculons dans un premier temps la force de Laplace. On négligera l’hélicité de la bobine, → − − et l’on se place dans un repère cylindrique. B s’exprime par B = −B→ e r (le champ est → − − dirigé du Sud vers le Nord !), tandis qu’un petit élément d’une spire s’écrit dl = dl→ e θ. Par conséquent la force de Laplace élémentaire vaut −→ → − → − − − − dF L = i dl ∧ B = −idlB→ eθ ∧→ e r = idlB→ ez L’expression est indépendante du courant et du champ, on intègre alors sur tout le fil, de → − − longueur l , pour obtenir F = i l B→ e . Le calcul du flux du champ magnétique n’est pas aussi évident que dans le système précédent, on va alors se servir de la méthode : → − − Pfem + PL = 0 = ei + F L · → v = ei + ilb Bvz ainsi on obtient directement la fém e = −lb Bvz b L b z Le circuit étant bobiné, il convient de prendre en compte le phénomène d’auto-induction On rend compte du couplage de la membrane avec l’air par des frottements visqueux (sans en introduisant une bobine d’inductance L. La loi des mailles dans le circuit électrique → − − frottements, pas d’air déplacé et donc pas de son) de la forme F f = −γvz → ez , tandis que équivalent permet d’écrire → − → − di le ressort exerce une force de rappel de la forme F r = −kz ez où la membrane est repérée E = Ri + L − e par rapport à sa position au repos. dt 3 E. Van Brackel Lycée Jean Perrin - Classe de TSI 1 3) ICE3 - Circuit mobile dans un champ magnétique stationnaire Bilan énergétique (Entraînez-vous à l’obtenir en écrivant au crayon ou sur une feuille à part) Ce moment, comme on l’a vu, permet la rotation du cadre mobile autour de son axe de symétrie, jusqu’à ce que le moment s’aligne dans le sens du champ magnétique, dont on rappelle qu’il s’agit d’une position d’équilibre stable. Interprétation : Pour cette spire, on peut calculer la fém induite en utilisant le bilan de puissance : Pfem + PL = ei + Γω = 0 soit e = −SBω. On constate que la fém est proportionnelle à la vitesse de rotation, à l’instar des rails de Laplace où elle était proportionnelle à la vitesse. b) Structure physique - nécessité d’un commutateur Ci-contre correspond un dessin de moteur continu usuel. La première constatation est qu’il n’y a pas qu’une seule spire, mais un III Applications aux systèmes tournants grand nombre, pour permettre de découpler Le systèmes précédents permettent un calcul aisé ainsi qu’un bilan de puissance quanti- les efforts sur une multitude de spires. Les tatif à partir d’un petit nombre de paramètres. Les principes généraux vont pouvoir être lois précédemment obtenues restent vraies appliqués sur des objets plus complexes tels que les moteurs, qui bien souvent peuvent pour l’enroulement de spires, et l’on aboutit à des relations du type : également jouer le rôle de producteur d’électricité (alternateur, dynamo,..). 1) e = −Kω Moteur à courant continu et Γ = Ki où K est une constante de proportionnalité, homogène à un flux magnétique. a) Principe de fonctionnement On va se baser sur les résultats obtenus au chapitre ICE1 : un cadre mobile (le rotor) alimenté par un courant continu, subit un → − champ magnétique B uniforme (créé par la pièce fixe, le stator), et est soumis à des forces de Laplace sur chacune de ses arêtes, dont la résultante est nulle, mais le moment de forces est non nul : → − → − − Γ =→ m∧B → − − où → m = i S est le moment magnétique associé à la spire de courant orientée. Un problème subsiste, il faut intervertir le sens du courant tous les demi-tours, sinon la spire reste à l’équilibre (2e figure ci-dessus). C’est le rôle du commutateur (aussi appelé collecteur) : le but est qu’à chaque demi-tour, le courant dans la spire soit inversé. Le commutateur frotte sur la surface de la bague tournante, le contact électrique étant assuré par des "balais". Le souci majeur vient de l’usure de ces pièces mécaniques et donc il nécessite un entretien régulier, auquel s’ajoutent des frottements. 4 E. Van Brackel Lycée Jean Perrin - Classe de TSI 1 ICE3 - Circuit mobile dans un champ magnétique stationnaire d) Bilan de puissance On peut enfin effectuer un petit bilan de puissance : c) Equations électro-mécaniques A noter qu’on appelle souvent l’ensemble des pertes par effet Joule et des pertes par frottePutile ments les pertes collectives. On définit enfin le rendement comme η = . A noter Pfournie que ce rendement est en général faible : environ 30% dans le meilleur des cas ! Pour l’équation électrique, si on ne prend pas en compte les effets inductifs éventuels (on est en courant continu !), on a simplement un générateur de tension u reliant une résistance (celle du bobinage) et la fem, soit u = Ri − e = Ri + Kω D’un point de vue mécanique, on est en présence d’un système tournant autour d’un axe fixe (∆), on applique donc le théorème du moment cinétique scalaire, sachant que l’on peut relier le moteur à une charge mécanique, ce qui induit un couple résistant Γr : dω J = Ki − Γr dt où J est le moment d’inertie du système par rapport à l’axe. En régime stationnaire, le couple développé par le moteur doit compenser exactement résistant. Or, le couple U K Γ = KI = K − ω soit R R KU K2 Γ= − ω R R Graphiquement on peut donc obtenir le point de fonctionnement, lieu d’intersection entre le couple résistant et le couple développé. On remarque que, pour un couple résistant donné, la vitesse de rotation est proportionnelle au courant, comme le couple moteur est proportionnel au courant ! C’est un résultat utile pour le pilotage des moteurs ! Un moteur est en général conçu pour fonctionner avec une charge bien définie et une vitesse de rotation bien définie, ce que l’on appelle le point de fonctionnement nominal, où le rendement de conversion électromécanique est maximal. C’est en général une caractéristique indiquée sur les moteurs. e) Applications On trouve ces moteurs dans de nombreux systèmes du quotidien : • ils actionnent tous les systèmes tournants de petite taille (dans l’ordinateur, la voiture, dans les robots,..). • ils sont utilisés dans les appareils électroménagers (robots, mixer), ce sont des moteurs à courant continu "détournés" car alimentés par un courant alternatif à la fois pour le rotor comme le stator (une bobine crée un champ magnétique), ce qui remplace l’utilisation d’un collecteur (=moteur universel). • il ne faut pas oublier que ce type de convertisseur électromécanique est réversible : si on tourne mécaniquement l’axe du moteur, on crée du courant, c’est une dynamo (ou génératrice) ! 2) Moteur synchrone a) Principe Les connaissances acquises dans les chapitres précédents permettent maintenant d’aborder le moteur synchrone. L’idée est d’employer un champ magnétique tournant (stator), que l’on peut réaliser avec 2 ou 3 bobines (ou davantage !), et de placer dans ce champ magnétique tournant un aimant permanent, de moment magnétique non nul (rotor). Qualitativement, le moment magnétique cherche à s’aligner avec le champ magnétique, et va donc tenter de le suivre en tournant à son tour. Cependant, la vitesse de rotation du moment magnétique est nécessairement la même que celle du champ, d’où son nom (synchrone). 5 E. Van Brackel Lycée Jean Perrin - Classe de TSI 1 ICE3 - Circuit mobile dans un champ magnétique stationnaire Du fait du chmap magnétique variable, des courants sont induits dans la spire, ce qui implique des forces de Laplace. Qualitativement, on peut s’attendre par la loi de Lenz à ce que le cadre mobile tourne en essayant de suivre le champ magnétique afin de faire en sorte que le flux reste constant. En effet, supposons que le champ tourne à la pulsation Ω, et le moment magnétique à ω0 . Le moment résultant sur l’aimant vaut → − − Γ=→ m ∧ B = mB sin (Ω − ω0 )t + φ0 ) où → − − φ0 est l’angle entre B et → mD à Et=0. Si → − on moyenne dans le temps, Γ = 0 si Ω 6= ω0 . Par conséquent le couple développé est nul, et globalement l’aimant ne va pas se déplacer.. Une propriété remarquable est que la fréquence de rotation du moteur est néces→ − sairement inférieure à Ω, vitesse de rotation de B , sinon dans le repère du champ tournant, il n’y aurait pas de phénomène d’induction, et donc pas de couple. Il y a donc synchronisme entre les deux vitesses de rotation pour que le système puisse b) Point de fonctionnement véritablement tourner et fournir un couple non nul. Dans cette configuration, il pourra y On peut tracer l’allure du couple développé par le moteur asynchrone en fonction de la avoir un équilibre stable : si on se place dans le référentiel tournant à la vitesse de rotation fréquence de rotation, afin de connaître le point de fonctionnement : Ω, moment et champ seront fixes l’un par rapport à l’autre. A noter que, lorsqu’un couple résistant est appliqué, et que le moteur tourne à vitesse constante, on doit avoir égalité entre les deux couples : Γ = Γr = mB sin(φ0 ) soit Γr . On constate que le moment magnétique est toujours en retard sur le champ, sin(φ0 ) = mB et que ce retard croît à mesure que le couple résistant augmente. b) Applications Détaillons les divers avantages et inconvénients qui sont liés à son utilisation : • contrôle précis de la vitesse de rotation, quelque soit le couple (pourvu qu’il ne soit pas trop grand) : utilisation adéquate dans des usines de production où l’on souhaite une rigueur dans les vitesses • permet de développer de fortes puissances : il équipe par exemple la ligne TGV Atlantique... • son fonctionnement est réversible : on peut s’en servir comme alternateur (dans toutes les centrales, qu’elles soient hydrauliques, nucléaires, thermiques !) pour produire un courant alternatif Dans ce graphique, R correspond à la résistance du bobinage, L à son inductance, S sa • très bon rendement, supérieur à 95% ! section, et B0 l’intensité du champ tournant. Plusieurs remarques : Un inconvénient majeur, cependant, réside dans leur démarrage : en effet, on peut faire une expérience simple et placer une aiguille fixe dans un champ tournant, on se rendra compte que l’aiguille ne se mettra en mouvement que si on lui donne une vitesse initiale... Par conséquent, certains moteurs synchrones sont lancés par des moteurs différents, ou d’autres techniques plus sophistiquées. 3) • Pour les fréquences comprises entre 0 et Ω le fonctionnement de la machine est moteur, car Γ > 0 et ω > 0. • A pulsation nulle, le couple développé est non nul, ce qui permet de faire démarrer le moteur sans soucis (contrairement au moteur synchrone) : on peut même l’augmenter en augmentant la résistance dans l’induit, pour la diminuer une fois que le moteur prend de la vitesse. • Il y a deux points de fonctionnement possibles si le couple résistant vérifie (B0 S)2 , mais seul celui de droite est stable. En effet, si le moteur tourne Γr < 4L un peu plus vite, son couple moteur diminue, et il ralentit. Inversement, si le moteur Moteur asynchrone a) Principe L’idée du moteur asynchrone consiste à remplacer le rotor précédent par un circuit mobile, sans source, par exemple une spire rectangulaire comme pour le moteur à courant continu. 6 E. Van Brackel Lycée Jean Perrin - Classe de TSI 1 ICE3 - Circuit mobile dans un champ magnétique stationnaire ralentit, le couple augmente, et donc il va accélérer. La situation est contraire pour le point de fonctionnement de gauche (vérifiez !) • Le point de fonctionnement déterminé précédemment indique que la vitesse de rotation dépend de la charge appliquée, contrairement au moteur synchrone. NéanR dépasse rarement 2 − 3 rad.s−1 , donc une variation maximoins, la valeur de L male de ∼ 50 tours.min−1 (à comparer à la fréquence de rotation du moteur de N ' 3000 tours.min−1 ). c) Applications Du fait d’excellents rendements (très proches de 1), ces moteurs sont utilisés dans de nombreuses machines tournantes nécessitant un couple important, pas de vitesse de rotation précise. Ils sont robustes, bon marché (pas d’aimant !), sans entretien. Au quotidien, on en trouve dans les VMC, le chauffage central, les pompes de vidange de machine à laver. Ils équipent de nombreux TGV dont la ligne Eurostar. Enfin, ils sont réversibles, à la seule condition qu’on alimente le rotor avec un courant continu pour qu’il y ait un champ magnétique créé au niveau du rotor, qui induise une fém dans le stator ( car faire tourner une spire dans un bobinage n’a jamais créé de courant...). 7 E. Van Brackel
© Copyright 2026 Paperzz