Correction - TD no 20 : Conversion électromécanique de puissance
Physique
Correction - TD n˚20 - Conversion
électromécanique de puissance
1 Deux machines à courant continu
2 Induction et conversion d’énergie
1. La tige étant en mouvement dans un champ magnétique stationnaire, elle est soumise à un
phénomène d’induction de Lorentz. Il apparaît donc dans la tige une force électromotrice e
PSI - Année 2010/2011
1
Lycée Paul Eluard
Correction - TD no 20 : Conversion électromécanique de puissance
Physique
telle que
Z
e=
tige
−
−
→ →
−
→
→
−
→
→
→
→
E m · d` avec E m = −
v e ∧ B = v−
u z ∧ (−B −
u y ) = Bv −
ux
−
→
et où e est orienté dans le sens de d`. En orientant le circuit dans le sens trigonométrique,
on a
Z a
e=
vBdx = vBa
0
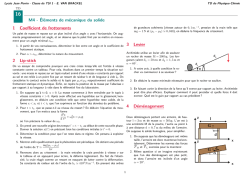
L
uy
+
B0
g
uz
ux
i
A
B
e
La loi des mailles fournit alors
di
+ Ri = e
dt
où i est orienté dans le sens de e. En remplaçant e par son expression, on obtient l’équation
électrique :
di
+ Ri − vBa = 0
(1)
L
dt
L
Remarque : Le flux du champ magnétique à travers le circuit est la somme du flux magnétique extérieur φe = −Ba(z + cste) et du flux propre φp = Li. La loi de Faraday
s’écrit
dφe dφp
d(Li)
dφ
=−
−
= Bav −
etot = −
dt
dt
dt
dt
Par ailleurs, la loi des mailles s’écrit
etot = Ri
et l’on retrouve l’équation différentielle précédente. Toutefois, le circuit étant déformable,
le coefficient d’inductance propre L dépend aussi du temps, effet que l’on néglige ici.
2. Dans le référentiel terrestre supposé galiléen, la tige est soumise :
→
? à son poids m−
g ;
−
→ −
−
→
−
→ R
→
−
→
→
→
? à la force de Laplace F = tige id` ∧ B . Avec d` = dx −
u x et B = −B −
u y , on obtient
−
→
F =
Z a
0
→
→
→
idx−
u x ∧ (−B −
u y ) = −iaB −
uz
Le principe fondamental de la dynamique appliqué à la ige dans le référentiel terrestre du
laboratoire s’écrit, en projection sur vuz :
m¨
z = mv˙ = mg − iBa
(2)
Remarque : On vérifie la loi de Lenz. Si v > 0, l’équation électrique montre que i > 0 ce
qui implique F = −iBa < 0 : la force de Laplace s’oppose à la chute de la tige.
PSI - Année 2010/2011
2
Lycée Paul Eluard
Correction - TD no 20 : Conversion électromécanique de puissance
Physique
3. Dans l’équation électrique, tous les termes ont la dimension d’une tension. En multipliant
l’équation (1) par i, on obtient un bilan de puissance électrique :
Li
soit
di
+ Ri2 − v i Ba = 0
dt
!
d 1 2
Li + Ri2 = ei = v i aB
dt 2
(3)
La puissance Pel = ei fournie par la force électromotrice est en partie stockée dans la
bobine (Em = 1/2 Li2 ) et en partie stockée par effet Joule (PR = Ri2 ).
Dans l’équation mécanique, tous les termes ont la dimension d’une force. En multipliant
l’équation (2) par v, on obtient un bilan de puissance mécanique :
m¨
z v = mgv − iBav
soit
d 1
mv 2 − mgz
dt 2
!
= F v = −v i aB
(4)
La puissance PL des efforts de Laplace est utilisée pour faire varier l’énergie cinétique Ec =
1/2mv 2 et l’énergie potentielle de pesanteur Em = −mgz.
En sommant les équations (3) et (4), on obtient
d 1
1
mv 2 − mgz Li2
dt 2
2
!
= −Ri2
(5)
Cette équation indique que l’énergie totale E du circuit (magnétique et mécanique) est
dissipée par effet Joule :
dE
= −Ri2
dt
avec E = Em + Ec + Ep
et
1
Em = Li2
2
1
Ec = mv 2
2
E = −mgz
p
Remarque : Le bilan énergétique ne fait intervenir ni le travail des efforts de Laplace,
ni l’énergie électrique fournie par la f.e.m. : ces deux puissances se compensent car la
conversion électromécanique possède un rendement de 100%.
4. L’équation électrique (1) fournit
1
v=
aB
di
L
+ Ri
dt
!
En reportant cette expression dans l’équation mécanique (2), on obtient
!
m
d2 i
di
L 2+R
aB
dt
dt
= mg − iaB
soit
d2 i R di (aB)2
gBa
+
+
i=
2
dt
L dt
mL
L
PSI - Année 2010/2011
3
(6)
Lycée Paul Eluard
Correction - TD no 20 : Conversion électromécanique de puissance
Physique
5. L’équation (6) se ré-écrit
d2 i R di (aB)2
+
+
dt2 L dt
mL
Posons
i0 =
mg
aB
mg
i−
aB
!
=0
et I = i − i0
L’équation (6) devient
d2 I R dI
(aB)2
2
2
+
+
ω
I
=
0
avec
ω
=
0
0
dt2 L dt
mL
L’équation caractéristique
r2 +
r
r + ω02 = 0
L
a pour discriminant
R2
− 4ω02
L2
Si la résistance est très grande, c’est-à-dire si R 2Lω0 , alors le coefficient d’amortissement est très grand et les solutions sont exponentiellement amorties. On en déduit
∆=
t→∞
I(t) −−−→ 0 soit
mg
aB
t→∞
i(t) −−−→ i0 =
La vitesse atteint donc également une valeur limite constante
1
v0 =
aB
di0
L
+ Ri0
dt
!
soit
v0 =
mgR
(aB)2
6. Si R est négligeable, c’est-à-dire si R 2Lω0 , la solution de l’équation différentielle
pour I(t) est quasiment sinusoïdale à la pulsation ω0 (il existe un amortissement sur une
durée caractéristique τ = L/R ω0 ) :
I(t) = A cos(ω0 t + varphi) soit
i(t) = i0 + A cos(ω0 t + ϕ)
où A et ϕ sont des constantes à déterminer en fonction des conditions initiales.
di
À t = 0, v = 0 et i = 0. On en déduit L (t = 0) = −Ri(t = 0) + aBv(t = 0) = 0. On a
dt
donc
(
i(t = 0) = 0 = i0 + A cos(ϕ)
ϕ=0
=⇒
di
A = −i0
(t = 0) = 0 = −Aω0 sin(ϕ)
dt
On obtient donc
i(t) = i0 [1 − cos(ω0 t)]
avec
mg
i0 =
aB
aB
ω0 = √
mL
PSI - Année 2010/2011
4
Lycée Paul Eluard
Physique
Correction - TD no 20 : Conversion électromécanique de puissance
L’équation mécanique (2) fournit
v˙ = g −
aB
i = g − g [1 − cos(ω0 t)] = g cos(ω0 t)
m
Par intégration, avec v(t = 0) = 0, on trouve
v(t) =
et
z(t) = −
g
sin(ω0 t)
ω0
g
cos(ω0 t) + rmcste
ω02
La tige oscille autour d’une position moyenne. Elle est parcourue par un courant moyen
hi(t)i = i0 de sorte que la force de Laplace vale
hF i = −i0 Ba = −mg
compense le poids.
Ce résultat était prévisible d’après l’équation (5) puisqu’en l’absence de résistance, aucun phénomène dissipatif n’intervient. L’énergie totale est donc constante et il y a une
conversion entre l’énergie magnétique stockée dans la bobine et l’énergie mécanique de la
tige.
3 Modélisation d’une machine à courant continu
1. La machine fonctionne en mode récepteur donc si uM CC > 0, le courant iM CC est positif
lorsqu’il est orienté en convention récepteur, donc e < 0 et e = −ϕ0 ω
Equation électrique
E − Ri − ϕ0 ω − L
di
=0
dt
−
→
→
La machine étant motrice, elle exerce un couple positif sur l’arbre, de sorte que Γ = ϕ0 i−
u z.
Equation mécanique
J
dω −
→
→
→
u z = −f ω −
u z + ϕ0 i−
uz
dt
2. La machine fonctionne en mode générateur donc si uM CC > 0, le courant iM CC est positif
lorsqu’il est orienté en convention générateur, donc e > 0 et e = −ϕ0 ω avec ω < 0
(remarque : on aurait pu également changer le sens de e en gardant ω > 0). L’équation
électrique reste inchangée (sauf avec la remarque précédente) :
Equation électrique
E − Ri − ϕ0 ω − L
di
=0
dt
→
−
La machine étant génératrice, elle exerce un couple négatif sur l’arbre, de sorte que Γ =
→
−ϕ0 i−
u z.
dω →
→
→
Equation mécanique
J −
u z = −f ω −
u z − ϕ0 i−
uz
dt
PSI - Année 2010/2011
5
Lycée Paul Eluard
Correction - TD no 20 : Conversion électromécanique de puissance
Physique
3. Lorsque le rotor est bloqué, ω = 0 et donc e = 0.
Equation électrique
E − Ri − L
Equation mécanique
di
=0
dt
ω=0
4 Etude d’une machine à courant continu
1. La machine fonctionne en mode récepteur, en tant que moteur, avec ω > 0, donc e =
−ke ω < 0, avec e orienté dans le sens du courant. On en déduit :
uM CC = Ra In − e = Ra I + ke ω
Donc ωn =
Un − Ra In
= 317rad.s−1 De plus, Γem = ke In = 9.15N.m et
ke
Γu = Γem − Γp = ke In − kp ωn = ke In −
Γp1 ωn
= 8.44N.m
ω1
2. Lorsque le moteur fonctionne à vide, en régime permanent, avec une vitesse de rotation
non nulle, égale à la vitesse de rotation nominale ωn , on peut écrire, d’après le théorème
du moment cinétique appliqué à l’arbre de la machine :
J
dωn
= 0 = Γem − Γp = Γu
dt
Le moteur fonctionne à vide signifie donc que le couple utile est nul, et on en déduit donc
kp
que Γem = Γu , soit kp ωn = ke I, donc Ivide = ωn = 1.16A .
ke
3. La machine fonctionne maintenant en génératrice à vitesse nominale ωn . Le moment résultant des forces résistantes est la somme du couple électromagnétique résistant et du moΓrt kp ωn
ment des forces de frottement : Γrt = Γem +Γp = ke Ig +kp ωn , donc Ig =
−
= 11.95A .
ke
ke
La puissance électrique P cédée au réseau continu est donnée par :
Pcédée = −Preçue = −eI = ke ωn Ig = 2.3kW
La génératrice produit donc une puissance relativement importante.
4.
a) L’application du théorème du moment cinétique à l’arbre de la machine s’écrit, en
négligeant le couple des forces de frottement :
J
dω
= −ke Ia − Γr
dt
soit
dω ke Ia + Γr
−
=0
dt
J
!
La résolution conduit, sachant ω(0) = ωn à : ω(t) = ωn −
ke Ia + Γr
t . La vitesse
J
de rotation est donc une fonction linéaire décroissante du temps, qui s’annule pour
ωn J
t = t1 =
ke I a + Γ r
PSI - Année 2010/2011
6
Lycée Paul Eluard
Correction - TD no 20 : Conversion électromécanique de puissance
Physique
b) L’énergie W récupérée pendant cette phase est donnée par :
W =
Z t1
0
eIa dt =
Z t1
0
1
Jωn2 Γr
ke ω(t)Ia dt = ... = Jωn2 −
2
2(ke Ia + Γr )
Or l’énergie cinétique Ec de l’ensemble rotor-charge au début de cette phase de frei1
nage est égale à Jωn2 . On vérifie donc que l’énergie restituée est bien inférieure à
2
l’énergie initiale, et que l’énergie dissipée fait bien intervenir le couple résistant Γr .
5 Machine à courant continu
PSI - Année 2010/2011
7
Lycée Paul Eluard
Physique
PSI - Année 2010/2011
Correction - TD no 20 : Conversion électromécanique de puissance
8
Lycée Paul Eluard
Physique
PSI - Année 2010/2011
Correction - TD no 20 : Conversion électromécanique de puissance
9
Lycée Paul Eluard
Physique
Correction - TD no 20 : Conversion électromécanique de puissance
6 Champ créé par une spire sur son axe
Invariances : la distribution de courants est invariante par
rotation autour de (Oz).
Les coordonnées cylindriques sont donc adaptées.
1. De plus, d’après le principe de Curie, les projections du
champ créé sont invariantes par cette rotation donc ne dépendent pas de θ : Bi (r, θ, z) = Bi (r, z). Enfin, r = 0 pour
M ∈ (Oz) donc Bi (r, θ, z) = B(z).
Symétries : soit M un point appartenant à l’axe (Oz). Tous les plans contenant M et (Oz)
sont plans d’anti-symétrie de la distribution de courants donc le champ magnétostatique
−
→
→.
en M appartient à l’intersection de ces plans : B (M ) est selon −
u
z
−
→
→.
Synthèse : B (M ) = Bz (z) −
u
z
(−−→
→
→
−
→ −−→ P M = −R −
ur + z −
u
−
→
z
µ0 r I dl∧P M
La loi de Biot et Savart s’écrit : B (M ) = 4π
−
→
P M3
−
→
dl = R dθ uθ (coordonnées cylindriques)
PSI - Année 2010/2011
10
Lycée Paul Eluard
Correction - TD no 20 : Conversion électromécanique de puissance
Physique
−
→
µ0 I
d’où B (M ) =
4π
w2π
0
R2 dθ
(R2 + z 2 )
w2π
−
→ + ...
: circuit parcouru en même sens que I
u
|{z}
3/2 z
−
→
=0
0
−
→
µ0 I
R2
−
→.
soit B (M ) =
u
z
2 (R2 + z 2 )3/2
−
→
µ0 I
→
On a bien B (M ) =
sin3 (α) −
u
z
2R
2. B =
µ0 I
R2
2 (R2 +z 2 )3/2
R
.
car sin (α) = √
2
R + z2
d’où son graphe en fonction de z :
−
→
µ0 I R2 −
→.
3. A très grande distance de la spire, z R : B (M ) '
u
z
2 z3
Note : Pour un dipôle magnétostatique, on a :
(
0
0 M 2 cos(θ )
0M
Br0 = µ4π
= µ2πz
si θ0 = 0 (sur l’axe)
3
r03
0)
sin(θ
µ
M
0
Bθ0 = 4π
=0
si θ0 = 0 (sur l’axe)
r03
−
→
−
→
−
→
→ d’où B = B 0 −
→
−
→ −
→
→ µ0 I R2 −
et M = I S = IπR2 −
u
z
r uz = 2 z 3 uz sur l’axe (ur0 = uz ). A grande distance,
le champ créé par une spire s’identifie donc à celui d’un dipôle magnétostatique.
7 Oscillations d’un petit aimant
L’application du théorème du moment cinétique à l’aimant permet d’obtenir :
dL0
→
= − [mgL + MB] sinθ−
uz
dt
Or
dL0
−
= mL2 θ¨→
uz
dt
Donc on obtient une équation différentielle en θ :
!
θ¨ +
g MB
+
sinθ = 0
L mL2
g
MB
Si le terme +
est positif, on obtient des oscillations et si θ reste petit, on obtient des
L mL2
oscillations similaires à celles d’un pendule, de période :
T0 = s
PSI - Année 2010/2011
2π
g MB
+
L mL2
11
Lycée Paul Eluard
Correction - TD no 20 : Conversion électromécanique de puissance
Physique
g MB
+
est négatif, ce qui est le cas si B est négatif et suffisamment grand on
L mL2
obtient des oscillations autour de la position θ = π (le chagement de variable θ0 = θ + π permet
en effet d’obtenir l’équation d’un oscillateur harmonique pour θ0 . De plus, si θ0 reste petit (c’est
à dire si θ reste proche de π), on obtient des oscillations de période :
Si le terme
2π
T0 = s
−
g MB
−
L mL2
Dans ce cas, tout se passe comme si la gravité avait été inversée.
8 Moteur synchrone
→
−
1. LA valeur instantannée du couple magnétique Γ exercé par le champ sur la pièce mobile
vaut :
→
−
−
Γ = MB0 sin [(ω0 − ω)t + α] →
uz
La valeur moyenne de ce couple vaut :
−
→
−
→
hΓi = 0
si
ω 6= ω0
−
→
→
h Γ i = MBsinα−
uz
si
ω = ω0
2. Le dispositif fonctionne en moteur (c’est à dire que le champ magnétique entraîne le moment magnétique dans une rotation dans le même sens) si α ∈ [0; π].
<Γ>
MB
−π
couple
moteur
−π/2
0
π/2
π
α
couple
résistant
-MB
Dans ce cas, la puissance maximale Pmax qu’il peut fournir vaut :
→
− →
Pmax = Γ · −
ω 0 = MB0 ω0 sinα
3. Si le moteur
prend de l’avance, d’après la figure de l’énoncé, α diminue.
"
#
π
Si α ∈ 0; , le couple diminue d’après la figure précédente, donc le moteur ralentit, et il
2
perd son avance. Le fonctionnement est donc stable.
PSI - Année 2010/2011
12
Lycée Paul Eluard
Physique
Correction - TD no 20 : Conversion électromécanique de puissance
"
#
π
; π , le couple augmente, et le moteur accélère et prend donc
En revanche, pour α ∈
2
encore davantage d’avance : le fonctionnement est donc instable.
PSI - Année 2010/2011
13
Lycée Paul Eluard
© Copyright 2026 Paperzz