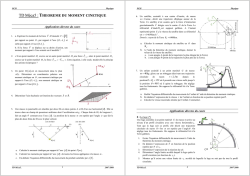
révisions 1ère année// MÉCANIQUE Dynamique du point matériel 1. Chute avec frottements On lâche d’une hauteur H sans vitesse initiale une sphère de masse m. La sphère est r r 1 soumise à une force de frottement fluide F = − ρSC x vv , où v est la norme du 2 vecteur vitesse de la sphère. On note g l’intensité du champ de pesanteur, supposé uniforme. a) Établir l’équation différentielle du mouvement régissant la cote z(t) du centre d’inertie de la sphère (initialement z = 0 ; lors du choc avec le sol, on a z = H ). b) Calculer la vitesse limite v lim que pourrait atteindre la sphère au bout d’une durée suffisamment longue, en fonction de m, g, ρ, S et C x . c) Résoudre l’équation différentielle du mouvement : — calculer v(t) en fonction de v lim et de g ; — calculer z(t) en fonction de v lim et de g. d) On lance simultanément de la même hauteur H = 2 m une boule de pétanque de masse m1 = 0,700 kg , de rayon r1 = 3,8 cm et une balle de tennis de masse m 2 = 0,058 kg , de rayon r2 = 3,35 cm . Pour ces deux sphères, on a C x = 0,44 . La masse volumique de l’air vaut ρ = 1,300 kg ⋅ m -3 et g = 9,81 m ⋅ s -2 . Calculer les vitesses limites v lim 1 et v lim 2 en m ⋅ s -1 , sachant que si r est le rayon d’une sphère, son maître-couple vaut S = πr 2 . Calculer la valeur z 2 de la cote du centre d’inertie de la balle de tennis lorsque la boule de pétanque touche le sol ( z1 = H ). Dans quel cas la boule de pétanque et la balle de tennis atteignent-elles le sol simultanément ? gt réponse : c) v = vlim th vlim d) z 2 = 2 cm 2. Accélération d’un palet sur un plan incliné Un palet de masse m1 est posé sur un plan incliné d’un angle α par rapport à l’horizontale. Il est lié à un solide de masse m2 en translation verticale, par l’intermédiaire d’un fil parfait qui passe sur une poulie idéale. On lâche le système sans vitesse initiale, le fil étant tendu. On tient compte de frottements solides entre le palet et le plan incliné, avec un facteur de frottement µ. a) Calculer dans l’hypothèse du glissement l’accélération du palet en fonction de m1 et m2 , α, µ et de l’intensité g du champ de pesanteur. À quelle condition sur m2 le palet remonte-t-il la pente ? m1 descend-il le long de la pente ? m b) À quelle condition sur 2 le système reste-t-il en équilibre ? A.N : α = 30° , µ = 0,4 . m1 c) Étudier le cas où il n’y a pas de frottements. réponse : a) &x& = [m 2 − m1 (sin α ± µ cos α)]g m1 + m 2 équilibre si sin α − µ cos α ≤ ; remontée si sin α − µ cos α ≤ m2 ≤ sin α + µ cos α , soit 0,154m1 ≤ m2 ≤ 0,846m1 m1 m2 m2 et descente si ≤ sin α + µ cos α b) m1 m1 Énergie du point matériel / oscillateurs mécaniques 3. Équilibre d’un point matériel lié à un élastique et se déplaçant sur un demi-cercle On considère un élastique de longueur à vide l 0 et de raideur k. a) L’élastique est suspendu à un support horizontal et on accroche à son extrémité libre un point matériel de masse m. Déterminer l’élongation a de l’élastique à l’équilibre ainsi que l’équation différentielle du mouvement. Résoudre cette équation différentielle et montrer que l’on a réalisé un oscillateur harmonique (pendule élastique) de pulsation ω 0 à déterminer. Le point matériel se déplace maintenant le long d’un demi-cercle de rayon a (valeur définie plus haut). Il est accroché à l’élastique de la question précédente. L’autre extrémité A de l’élastique est fixe et se trouve à une distance l 0 du bord B du demi cercle. La droite (OA) est horizontale. b) Déterminer l’équation différentielle régissant l’angle θ par application du P.F.D. c) Déterminer l’équation différentielle régissant l’angle θ par application du théorème de l’énergie cinétique. Comparer les deux méthodes. d) Déterminer la position d’équilibre θ eq e) On pose θ = θ eq + ε , avec ε << 1 . Déterminer l’équation différentielle régissant ε(t). La résoudre et montrer que l’on a des oscillations de pulsation ω (à calculer en fonction de ω 0 ). Conclure sur la stabilité de l’équilibre. réponse : a) ∆l = θ eq = mg k , l’équation différentielle du mouvement est && z + z = 0 ⇒ ω0 = k m k && + k (sin θ − cosθ ) = 0 d) . b) θ m m 1 π e) &&ε + 2ω 02 ε = 0 ⇒ ω ′0 = ω 0 4 : équilibre stable 4 4. Mouvements d’un pendule simple Un point matériel est relié à O par l’intermédiaire d’un fil inextensible de longueur l. On lui communique une vitesse v 0 alors qu’il se trouve dans la position θ = 0 . Quel est le mouvement du point matériel (discuter en fonction de la valeur de v 0 ). réponse : Pour v0 > 5gl le pendule effectue indéfiniment des révolutions autour de O. Pour 2 gl < v0 < 5gl , le fil n’est plus tendu pour un angle θ d tel que cosθ d = 2 v0 2 − : le point 3 3gl matériel amorce alors un mouvement parabolique. Pour v0 < 2 gl , le pendule oscille autour de sa position d’équilibre θ = 0 5. Mouvement vers un équilibre instable Un point matériel de masse m se déplace sans frottement le long d’un axe horizontal Ox. La somme des forces qui lui sont appliquées dérive de l’énergie potentielle cicontre : On note A0 , A1 , A2 , Aeq les points de l’axe Ox d’abscisses x0 , x1 , x2 , xeq . a) L’énergie mécanique du point matériel est E m = E 0 < E p max . Montrer que le mouvement est périodique. Calculer à l’aide d’une intégrale de la variable x le temps que met le point matériel pour aller de A1 à A2 . Montrer que c’est le même que pour parcourir le chemin inverse, et que ce temps est fini. b) L’énergie mécanique du point matériel est E m = E0 = E p max et à t = 0 , on a x = x0 . Montrer qu’il faut au point matériel un temps infini pour rejoindre Aeq . x2 réponse : a) τ = ∫ x1 m 2 dx E0 − Ep ( x) 6. Oscillateur anharmonique On étudie le mouvement d’un point matériel de masse m se déplaçant sur un axe Ox et uniquement soumis à des forces 1 x2 conservatives, dérivant de l’énergie potentielle : E p = kx 2 1 − 2 où a est une longueur positive. 2 2a a) Tracer E p ( x) et étudier qualitativement le mouvement pour une énergie mécanique Em donnée, à partir de ce diagramme. Construire parallèlement le portrait de phase du système. b) On suppose x << a et on cherche en quoi le terme − x = x m cos(ω0 t + ϕ) de l’oscillateur harmonique, avec ω0 = x2 2a 2 dans l’énergie potentielle modifie la solution sinusoïdale k . m La solution restant périodique, on pose x = xm [cos(ωt + ϕ) + ε(t )] , ε(t) étant donc un terme du même ordre que Montrer qu’il faut chercher ε sous la forme ε(t ) = λ cos(ωt + ϕ) + µ cos(3ωt + 3ϕ) . Calculer ε(t ) . xm 2 a2 << 1 . 3x 2 Montrer que ω ≈ ω0 1 − m2 . 8a c) Montrer que l’on peut appliquer ce résultat au cas d’un pendule pesant lorsque l’angle maximal θ max atteint justifie un θ 2 développement limité de sin θ à l’ordre 3 : démontrer la formule de Borda pour la période: T ≈ T0 1 + max . 16 réponse : a) voir ci-contre b) &x& + ω0 2 x − ω0 2 x3 a2 =0 x 2 x ≈ xm cos(ωt + ϕ) − m 2 cos(3ωt + 3ϕ) 32a Mouvement d’une particule chargée dans un champ électromagnétique stationnaire 7. Effet Hall Le germanium pur Ge est un bon isolant électrique. Lorsqu’on introduit des impuretés en très faible concentration, par exemple de l’antimoine Sb, la conductivité électrique du germanium augmente fortement : on obtient un « semi-conducteur dopé », noté Ge/Sb, dont les propriétés électriques dépendent à la fois du nombre d’atomes Sb introduits par unité de volume, noté n, et de la température absolue T. On propose le modèle suivant de conduction dans le germanium dopé : dans Ge pur, tous les électrons (de charge −e , de masse m ) sont engagés dans des liaisons chimiques et ne peuvent participer à la conduction électrique. Dans Ge/Sb, à température ambiante, chaque atome Sb libère un électron dans le réseau cristallin. Sous l’action d’un champ électrique uniforme et r r constant E , les charges libres sont animées d’une vitesse v . On modélise l’action des atomes ou ions du réseau sur ces charges r r r v par une force de frottement du type f = −m (modèle de Drude), où v est la vitesse de l’électron par rapport au référentiel τ r r r r r du laboratoire, supposé galiléen, associé au repère Oxyz de base ( e x , e y , e z ). On a E = Ee x et on néglige l’action de la pesanteur. r r a) Montrer que l’électron atteint une vitesse limite v ∞ et exprimer, en régime permanent, le vecteur densité de courant J . m Montrer que la résistivité électrique ρ de Ge/Sb est : ρ = 2 . ne τ A.N : ρ = 1,22 ⋅ 10−2 Ω ⋅ m pour un échantillon de « concentration » atomique n = 1,6 ⋅ 10 21 m -3 , charge élémentaire : e = 1,6 ⋅ 10 −19 C , masse d’un électron m = 9,1 ⋅ 10 −31 kg , masse molaire atomique de Ge : M = 72,6 g ⋅ mol -1 , masse volumique de Ge : µ = 5,32 ⋅ 10 3 kg ⋅ m -3 . Constante d’Avogadro : N A = 6,02 ⋅ 10 23 mol -1 . Calculer le nombre d’atomes Ge par m 3 d’échantillon et en déduire le nombre d’atomes Sb par atome de germanium. Calculer τ et commenter. b) L’échantillon Ge/Sb est découpé sous forme d’un ruban de longueur L = 20 mm parallèle à l’axe Ox, de section rectangulaire de largeur l = 1 mm parallèle à Oy, et d’épaisseur d = 0,2 mm parallèle à Oz. Un générateur de courant continu ( i = i 0 ), disposé en série suivant la ligne de r r plus grande longueur, crée un champ électrique uniforme E 0 = E 0 e x . On place l’échantillon dans un champ magnétique constant et dont les variations spatiales se font sur des distances nettement plus grandes que la taille du r r ruban, si bien qu’on peut le considérer uniforme : B = Bez . Montrer que la force magnétique entraîne l’apparition d’une distribution de r charges sur les bords du matériau, créant un champ électrique E H (appelé champ de Hall), considéré comme uniforme, colinéaire à l’axe Oy, et dont on précisera le sens. En régime permanent, le vecteur densité de courant est colinéaire à l’axe Ox. Écrire l’équation différentielle du mouvement d’un électron libre, en déduire le champ E H en fonction de E 0 , τ, e, m et B. Montrer que E 0 et i 0 sont liés par la relation ρi 0 , en déduire E H en fonction des données du problème, puis la différence de potentiel U H que l’on peut mesurer ld entre les deux bords de l’échantillon de part et d’autre de sa largeur. A.N : Calculer U H pour une intensité i 0 = 10 mA , dans un champ B = 0,1 T . Donner une application du phénomène étudié. E0 = réponse : b) E0 = ρi0 i B i B , EH = − 0 , U H = 0 = 19,5 mV ld neld ned 8. Piège de Penning Un électron (masse m, charge −e ), dont le mouvement est décrit dans un système de coordonnées cartésiennes, se trouve dans un champ de potentiel électrostatique : V ( x, y, z ) = λ( x 2 + y 2 − 2 z 2 ) , avec λ > 0 . a) Calculer la force s’exerçant sur l’électron et déterminer les équations différentielles régissant x(t), y(t) et z(t). Quelles sont les positions d’équilibre ? Étudier leur stabilité. Retrouver ces résultats par un raisonnement énergétique. r r b) On superpose un champ magnétique B = Be z uniforme et constant. Quelles sont les nouvelles positions d’équilibre ? Reprendre les équations différentielles du mouvement : montrer que l’on obtient : ω 2 (1) &x& + ωc y& − z x = 0 2 ωz 2 ( 2) & & & , et expliciter ωc et ω z en fonction de e, B, m et λ. y − ω x − y=0 c 2 &z& + ω z 2 z = 0 c) Les deux premières équations différentielles de ce système sont couplées. On pose alors X = x + iy . Montrer en effectuant (1) + i (2) que l’on obtient une équation différentielle à coefficients complexes de la variable complexe X . En déduire que l’électron reste au voisinage du point O origine du système de coordonnées cartésiennes, si et seulement si ωc > 2 ω z . En déduire une condition sur le champ magnétique B. L’étude de l’énergie potentielle E p ( x, y, z ) permettait-elle de prévoir une telle stabilité ? d) Résoudre l’équation différentielle précédente dans le cas où x(0) = x0 , x& (0) = 0 y (0) = 0, y& (0) = 0 . z (0) = z , z& (0) = 0 0 On pose α = ω ω ωz 1 < , ω1 = c 1 − 1 − 2α 2 et ω 2 = c 1 + 1 − 2α 2 . ωc 2 2 2 ωc > 2 ω z , avec pour conditions initiales Exprimer x(t), y(t) et z(t) en fonction de x0 , z 0 , ω1 , ω2 et ω z . e) Pour se représenter le mouvement de l’électron, on le décompose en trois mouvements simples sinusoïdaux, ne faisant intervenir qu’une des trois pulsations ω1 , ω2 et ω z (ces mouvements, appelés modes propres peuvent être obtenus avec certaines conditions initiales). Quels sont ces modes propres ? En déduire le mouvement de l’électron avec les conditions initiales du d) et dans le cas α << 1 . réponse : b) ωc = eB eλ , ωz = 2 m m x0 x = ω − ω (ω2 cos ω1t − ω1 cos ω 2 t ) 2 1 x0 d) y = (ω2 sin ω1t − ω1 sin ω 2 t ) e) ω2 − ω1 z = z 0 cos ω z t 9. Mouvement d’électrons dans un condensateur cylindrique Des électrons (masse m, charge −e ) sont émis dans le vide, sans vitesse initiale, en un point A de l’armature centrale d’un condensateur cylindrique soumis à un tension constante U (l’armature centrale, de rayon a, est à la masse, l’armature externe, de rayon b, est portée au potentiel U). a) On néglige les effets de bord. Expliquer ce que cela signifie et donner une condition sur la géométrie du système pour que cette approximation soit valable. r r r En déduire que le champ électrique s’écrit E = E (r )er . Les électrons sont également soumis à un champ magnétique B uniforme et constant, porté par l’axe du condensateur. Déterminer qualitativement la trajectoire d’un électron. b) On repère la position d’un électron grâce aux coordonnées cylindriques (r,θ,z). Montrer que θ& est relié à r par : 1 mr 2θ& = eB(r 2 − a 2 ) . 2 c) On veut éviter que le condensateur soit parcouru par un courant : aucun électron ne doit atteindre l’armature externe. En appliquant le théorème de l’énergie cinétique à l’électron dans le cas limite où il parvient à atteindre l’armature externe, montrer qu’il existe une tension critique U c à ne pas dépasser. On exprimera U c en fonction de e, m, a, b, et B. r r U Γr d) Montrer que le champ électrique entre les armatures est donné par l’expression E = − er = − er . Les électrons r b r ln a r sont émis avec une vitesse v0 orthoradiale, par une fine fente F parallèle à l’axe du cylindre, positionnée en ( θ = 0, r = r0 ). Un collecteur C (fine fente parallèle à l’axe du cylindre), est placé en ( θ = ψ, r = r0 ). Montrer qu’en jouant sur la valeur de Γ (c’est-à-dire de U), on ne recueille dans le collecteur que les électrons possédant une vitesse v0 déterminée leur permettant d’avoir un mouvement circulaire uniforme. Comment choisir v0 pour que l’on collecte les électrons dont la vitesse se trouve dans l’intervalle [v0 − ∆v0 , v0 + ∆v0 ] , avec ∆v0 << 1 ? Quelle est alors la valeur de Γ ? e) On se place dans les conditions précédentes. Montrer qu’en plaçant convenablement le collecteur (déterminer la valeur r particulière que doit prendre l’angle ψ), on récupère également les électrons dont la vitesse v0 fait un petit angle α avec la direction orthoradiale en F. On pourra poser r = r0 (1 + ε) , avec ε << 1 du même ordre que α. Montrer que l’on peut utiliser cette expérience pour déterminer précisément la charge massique réponse : c) U c = ( eB 2 b 2 − a 2 8m b2 ) 2 d) v0 = e de l’électron. m eB 2 r0 2 eBr0 e π 2 , alors Γ = e) ψ = = 127,3° , = 2 m 2m 4m 4U b B 2 r0 2 ln a Interactions newtoniennes 10. Étude d’un satellite Un satellite terrestre de masse m = 1000 kg passe à une distance minimale rmin = 6800 km du centre de la Terre O et sa période orbitale est T = 6000 s .On donne le rayon de la Terre RT = 6400 km et le champ de gravitation au sol g 0 = 9,80 m.s -2 a) Calculer le demi-grand axe a de sa trajectoire. b) Calculer la distance rmax entre le centre de la Terre et l’apogée de la trajectoire du satellite. c) Quelle est la valeur v A de la vitesse du satellite à l’apogée A de sa trajectoire ? d) Pour rendre circulaire cette trajectoire, on effectue avec les moteurs une poussée constante et tangente à la trajectoire à l’apogée A, pendant une durée suffisamment courte τ = 5,00 s pour pouvoir négliger le déplacement du satellite. Quelle doit être la valeur v′A de la vitesse après la poussée pour que la trajectoire du satellite soit un cercle de rayon rmax ? e) En déduire la valeur de la force de poussée F en fonction de m, τ, v A et v′A . On négligera durant cette phase la force gravitationnelle exercée par la Terre sur le satellite devant F. f) Pour le satellite précédent de trajectoire circulaire, un carré situé sur la Terre et dont chaque coté est de longueur L est vu sous un angle de 5°, l’image transmise à la Terre étant composée de 16.106 pixels. Quelle est la résolution ∆L du système optique embarqué (distance minimale séparant deux points sur la Terre pour qu’ils ne soient pas confondus dans le même pixel). Quelle est la résolution pour un satellite militaire contenant le même système optique mais gravitant à une altitude h = 180 km ? réponse : a) a = 7150 km c) v A = 7135 m ⋅ s -1 e) F = 36200 N f) ∆L = 34,0 m 11. Satellite géostationnaire a) Caractériser sa trajectoire : plan ? rayon (donné avec 5 chiffres significatifs) ? sens de parcours ? b) Quelles sont les zones couvertes par un tel satellite ? Combine faut-il au minimum de satellites géostationnaires pour qu’il y ait communication entre deux points quelconques des zones couvertes ? réponse : b) latitudes couvertes : −81,3° < λ < 81,3° ; il faut au moins 3 satellites. Solide en rotation autour d’un axe fixe 12. Glissement d’une gomme sur une règle Une règle homogène de masse M a pour longueur AB = 2l . Une gomme de masse m est posée sur l’extrémité A de la règle. Les frottements entre la gomme et la règle sont caractérisés par un facteur µ. La règle est mobile sans frottement autour d’un axe horizontal passant par son milieu O et perpendiculaire à AB. Sa position est caractérisée par l’angle θ qu’elle fait avec l’horizontale. L’ensemble est lâché sans vitesse initiale à partir de la position horizontale. La règle s’incline et la gomme se détache pour un angle θ lim . Calculer θ lim en fonction de M, m et µ. Comparer avec la valeur qu’on obtiendrait en inclinant lentement la règle. µM réponse : θ lim = arctan M + 9m 13. Oscillations d’un système de deux masses liées par un fil Un solide S1 de masse M peut se déplacer sans frottement sur un axe horizontal Ox. Il est lié à un ressort horizontal de raideur k, et par l’intermédiaire d’un fil inextensible de masse négligeable, à un solide S 2 de masse m se déplaçant verticalement. Le fil passe sans glisser dans la gorge d’une poulie de rayon a et de moment d’inertie J par rapport à son axe ∆ fixe et horizontal, pouvant tourner sans frottement avec la vitesse angulaire ω autour de cet axe. On repère la position de S1 grâce à son abscisse x et celle de S 2 grâce à sa cote z. Déterminer de deux façons différentes l’équation différentielle en x du mouvement. Quelle est la nature de ce mouvement ? J réponse : M + m + 2 &x& + kx = 0 mouvement sinusoïdal a
© Copyright 2026 Paperzz