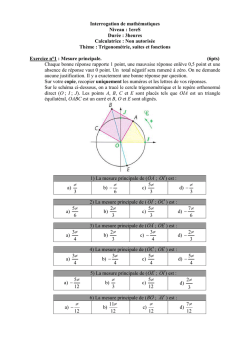
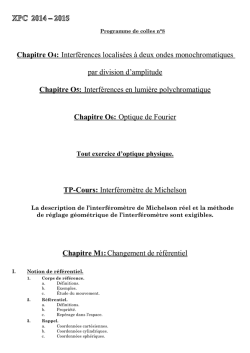
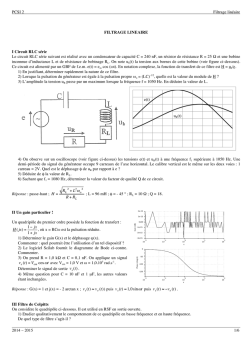
PCSI Physique TD Méca5 : THEOREME DU MOMENT CINETIQUE Applications directes du cours PCSI Physique 6. Un satellite, assimilé à son centre d’inertie, de masse m = 1 tonne , décrit une trajectoire elliptique autour de la Terre. Ce satellite n’est soumis qu’à la force d’interaction gravitationnelle F dirigée vers le centre O de la Terre. Le référentiel d’étude ℜ g est supposé galiléen. A l’instant représenté (point S ), la vitesse du satellite dans ce référentiel est v = 14650km.h −1 . Donnée : rayon de la Terre RT = 6400km . 1. a. Exprimer le moment de la force F d’intensité F = F par rapport au point O , par rapport à l’axe ( O, −ez ) et enfin par rapport à l’axe ( O, ez ) . b. Si la force F se déplace sur sa droite d’action, son moment par rapport à l’axe orienté est-il modifié ? a. Calculer le moment cinétique du satellite en O dans ℜg . b. A l’aide du théorème du moment cinétique, donner la valeur de la vitesse du satellite : a. à son apogée A (point de la trajectoire le plus éloigné de la Terre). b. à son périgée P (point de la trajectoire le plus près de la Terre). 2. « Si un point matériel M 1 exerce sur un autre point matériel M 2 une force F1→2 , alors le point matériel M 2 exerce sur le point matériel M 1 la force F2→1 = − F1→2 ». Cette équation, à elle seule, traduit-elle le principe des actions réciproques ? 3. Un point M ( m ) est en mouvement dans le plan xOy . Déterminer en coordonnées polaires son moment cinétique en O , son moment cinétique par rapport à l’axe ( O, −ez ) , son moment cinétique en par rapport à l’axe ( O, ez ) . 7. Un enfant assimilé à un point matériel G de masse m = 40kg glisse sur un toboggan décrivant une trajectoire r = 2,5m depuis la circulaire de rayon position θ = θ 0 = 15° où il possède une vitesse nulle jusqu’à la position θ = 90° où il quitte le toboggan. On néglige tous les frottements. On suppose le référentiel lié à la Terre galiléen. 4. Déterminer l’aire hachurée en fonction des vecteurs A et B . a. Etablir l’équation différentielle du mouvement de l’enfant à l’aide du théorème du moment cinétique. b. En déduire l’expression de la vitesse v de l’enfant en fonction de sa position repérée par θ . c. Calculer la vitesse maximale atteinte par l’enfant. Commenter. 5. Une masse m ponctuelle est attachée par deux fils en deux points A et B d’un axe horizontal ( ∆ ) . Elle se trouve dans un champ de pesanteur uniforme dont l’accélération est g . Chaque brin de fil, de longueur ℓ , fait un angle θ constant avec l’axe ( ∆ ) . La position de la masse m est repérée par l’angle φ que fait le plan des deux brins de fil avec le plan vertical. φ Applications directes du cours 8 : La luge.(*) Une luge assimilée à un point matériel G de masse m arrive au niveau d’un profil circulaire avec une vitesse horizontale v0 . Tant que la luge suit ce profil, elle décrit une trajectoire circulaire de rayon R = 5m et est repérée par l’angle θ . On néglige tous les frottements. On suppose le référentiel lié à la Terre galiléen. 1. 2. a. Calculer le moment cinétique par rapport à l’axe ( ∆ ) du point P ( m ) . 3. 4. c. En déduire l’équation différentielle du mouvement du pendule satisfaite par φ (t ) . 5. b. Calculer les moments par rapport à l’axe ( ∆ ) de toutes les forces appliquées à la masse m . TD Méca5. 1 2007-2008 Ecrire l’équation différentielle du mouvement à l’aide du théorème du moment cinétique. En déduire l’expression de θɺ en fonction de la position repérée par θ et v0 . Déterminer l’expression de la réaction du sol. Déterminer l’angle limite au-delà duquel la luge quitte le profil circulaire (en fonction de v0 ). Montrer qu’il existe une valeur limite de v0 au-delà de laquelle la luge ne suit pas du tout le profil circulaire. TD Méca5. 2 2007-2008 PCSI Physique PCSI Physique 9 : Pendules reliés par un ressort. 1. Oscillations d’un pendule (**) Un point matériel M ( m ) est relié à un fil inextensible de longueur L = O1M et de masse négligeable et à un ressort horizontal de raideur k et de longueur à vide l0 . Le fil est vertical lorsque le point matériel se trouve au repos en O1 ' . On envisage des petites oscillations quasi horizontales du point M , telles que O1 ' M ≪ L . La position de M est repérée par l’angle θ entre le fil et la verticale. a. Etablir l’équation du mouvement en utilisant le théorème du moment cinétique. b. En déduire la période T0 des petites oscillations. 2. Couplage entre deux pendules (***) Deux pendules simples identiques, de masse m , et de longueur L = O1M 1 = O2 M 2 , sont reliés par un ressort horizontal de raideur k et de longueur à vide l0 = O1 ' O2 ' = O1O2 . Les points M1 et M2 sont au repos dans les positions O1 ' et O2 ' lorsque les deux fils sont verticaux. On considère des petites oscillations quasi horizontales des points M 1 et M 2 , telles que O1 ' M 1 ≪ L et O2 ' M 2 ≪ L . Les positions de M 1 et M 2 sont repérées par les angles θ1 et θ 2 entre les fils et la verticale. a. Déterminer les équations différentielles couplées satisfaites par θ1 et θ 2 , à partir du théorème du moment cinétique. g k k On posera : ω0 2 = + et Ω0 2 = . L m m b. On note S = θ1 + θ 2 et D = θ1 − θ 2 . Quelles sont les équations différentielles vérifiées par S et D ? En déduire θ1 et θ 2 en faisant intervenir des constantes d’intégration. Comment déterminer ces constantes ? 10 : Au bout du fil.(**) Un cylindre d’axe de révolution Oz et de rayon R , repose sur un plan horizontal et est fixe par rapport au référentiel galiléen d’étude. On attache une extrémité d’un fil inextensible et de masse négligeable à la base du cylindre, en I0 . L’autre extrémité ( ) 1 A∧ B . 2 ( ) 6 : a. L O = m CS vez . b.i. vA = ( ) ( ) g sin φ = 0 . l sin θ SC SC v = 5915 km.h -1 . b.ii. vP = v = 3, 628.104 km.h -1 . R T + AA' R T + PP' g 7 : a. θɺɺ − cos θ = 0 . b. v 2 = 2 gR (sin θ − sin θ0 ) . 3. vmax = 21,7 km.h -1 . r v 2 2g v2 v2 g 1 ɺɺ 8 : 1. θ = sin θ . 2. θɺ 2 = 02 + (1− cos θ ) . 3. R N = m g (3cos θ − 2) − 0 e r . 4. cos θlim = 2 + 0 . 5. v02max = gR . r R R R gR 3 g k mL . 2.a. θɺɺ1 + ω 02 θ1 = Ω 02 θ2 . b. θɺɺ2 + ω 02 θ2 = Ω 02 θ1 . 9 : 1.a. θɺɺ + + θ = 0 . b. T0 = 2π L m mg + kL ɺɺ + (ω 2 + Ω2 ) D = 0 . θ = 1 A cos (ω t + ϕ ) + A cos (ω t + ϕ ) ; 2. Sɺɺ + (ω02 −Ω02 ) S = 0 ; D 0 0 1 S S S D D D 2 1 g θ2 = AS cos (ω St + ϕS ) − AD cos (ω D t + ϕ D ) avec ω S = ω 02 −Ω 02 = et ω D = ω 02 + Ω 02 . 2 L mv02 10 : 1. L 0 = L + Rθ . 5. T = . L20 − 2 Rvo t r L20 − 2 Rv0t L0 − . R R 5. Déterminer la tension T du fil en fonction de m, L 0 , R, v0 et t . 6. Expliquer pourquoi le fil cassera avant de s’enrouler complètement sur le cylindre. 4. Déduire des questions précédentes que θ (t ) = 3 ( ) 5 : a. L∆ = ml 2 sin 2 (θ )φɺ . b. M ∆ P = −mgl sin θ sin φ ; M ∆ TA = M ∆ TB = 0 .c. φɺɺ + 3. Montrer que la vitesse (en norme) du point M reste constante au cours du temps. TD Méca5. ( ) 4 : Aire = du fil est fixée à une particule M ( m ) astreinte à glisser sans frottement sur le plan horizontal. La longueur du fil non enroulée sur le cylindre à un instant t est L ( t ) . A l’instant t = 0 , on communique à M une vitesse v0 horizontale, perpendiculaire à I0 M = L 0 . On suppose que le fil reste tendu au cours du mouvement. 1. Relier L 0 ,L, R et θ . 2. Montrer que v (M) = −(L − Rθ )θɺe . 0 Réponses ou éléments de réponses : 1 : a. M O F = −bF ez , M (O ,−ez ) F = bF , M (O ,ez ) F = −bF . b. non. 3 : LO ( M )ℜ = mr 2 θɺ ez , L(O ,−ez ) ( M )ℜ = −mr 2 θɺ , L(O ,ez ) ( M )ℜ = mr 2 θɺ . 2007-2008 TD Méca5. 4 2007-2008
© Copyright 2026 Paperzz