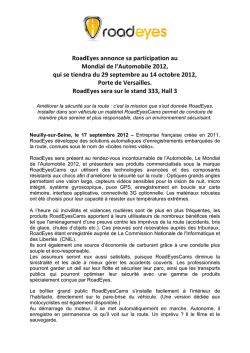
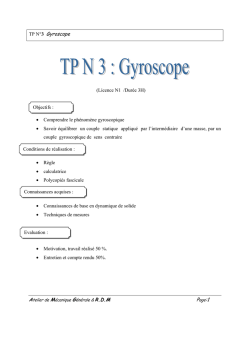
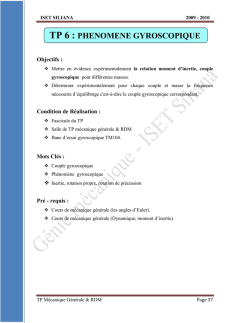
Nacelle gyroscopique avec roue de vélo (« toupie ») Physique et ordres de grandeur Roue de vélo gyroscopique La roue de vélo ci-contre peut être lancée « à la ficelle » au moyen de la poulie (noire) qui est sur son moyeu. Elle est alors une « toupie » gyroscopique qui « veut conserver la direction de son axe de rotation » dans l’espace inertiel. Ici, elle est suspendue dans un châssis qui la laisse libre de ses mouvements autour d’un axe vertical et autour d’un axe horizontal. Lancée dans cette direction, son axe de rotation horizontal fait « garde-cap » (en d’autres termes, « gyroscope directionnel »). Ce type d’utilisation (« suspendu à la Cardan ») est étudié dans un autre atelier. Mais… Dans les pages suivantes, nous allons voir comment cette roue, tenue à bout de bras par un opérateur, peut servir « d’appui gyroscopique » permettant de faire tourner l’opérateur, même hors de contact avec le sol. Une utilisation qui a une parenté avec ce qu’on appelle ailleurs un mode « gyrométrique ». Un opérateur libre de pivoter A droite : opérateur assis, suspendu « sans torsion » A gauche, opérateur debout pivotant « sans frottement » Lorsqu’il incline ou fait pivoter la roue autour d’un axe vertical, l’opérateur tourne à droite ou à gauche autour de son pivot ou de sa suspension : effet gyroscopique s’appuyant… sur les étoiles ! Ici, quand l’opérateur lève son bras droit (et baisse le gauche), il se met à tourner (indéfiniment, si tout était sans frottements ni torsions) dans le sens des aiguilles d’une montre. Il tournerait à l’envers… si la roue tournait à l’envers ! Les instruments Z Y H V L’opérateur est assis sans contact avec le sol, sur une planchette suspendue au plafond par une chaîne « sans torsion » (jusqu’à des déflexions de +/- 130°). Il tient à bout de bras une roue qu’on mettra en rotation. X Pour une vitesse circonférentielle V, et si la masse tournante M de la roue est concentrée à la périphérie (rayon R), le « moment cinétique » H est : H = MRV avec V = RΩ (Ω = vitesse de rotation) Ou autrement : H = I Ω avec : I = MR² = « moment d’inertie » (plus généralement : I = ΣMR² pour des masses réparties sur des rayons différents) Notations et équations I est le moment d’inertie (masse x rayon²) de la roue de vélo (en bleu) Ω est la vitesse de rotation (radians/s) de la roue H = I. Ω est le moment cinétique de la roue (vecteur) dH/dt est la vitesse de précession que les mains appliquent à la roueÛ Â est l’angle d’inclinaison de H sur l’horizontale C Û est l’angle de la nacelle autour de sa suspension Ω Û* est la vitesse angulaire (dérivée de Û) H (même type de notation pour Â*) C est le couple gyroscopique qui dH/dt résulte de dH/dt, car , vectoriellement: C = dH/dt  I Dit plus « verbalement »… 1- Au départ, la roue tourne autour de son axe horizontal : H (vecteur) est horizontal 2- L’opérateur applique un couple pour incliner H (il lève une main et abaisse l’autre) 3- L’opérateur reçoit en retour (réaction) un couple gyroscopique C = dH/dt … 4- …c’est-à-dire proportionnel à la vitesse d’inclinaison de H par rapport à l’horizontale 5- Ce couple est (pour le petites inclinaisons) selon l’axe Z vertical, c’est-à-dire… 6- Que le couple fait pivoter l’opérateur suspendu, dans le sens horaire ou anti-horaire (respecter le sens du trièdre direct X,Y,Z). Ceci étant, on va voir (planches suivantes) que … 7- Même si on arrête d’incliner l’axe de roue, une impulsion de couple aura été donnée, et aura mis l’opérateur en rotation. Celle-ci n’a aucune raison de s’arrêter. C’est comme si, dans l’espace, on avait donné une impulsion à un astronaute : il s’écartera indéfiniment. 8- L’effet du couple gyroscopique sur l’opérateur (mise en rotation) est inversement proportionnel à l’inertie (le moment d’inertie) de celui-ci. Unités et ordres de grandeur 1- Moments d’inertie (en kg.m² = masse x rayon²) 1.1- Roue : 2 kg à 0,3 mètre I = 0,2 kg.m² 1.2- Homme debout : 80 kg à 0,1 mètre M 1= 0,8 kg.m² 1.3- Roue à bout de bras : 2 kg à 0,5 m M2 = 0,5 kg.m² 1.4- Homme debout + roue à bout de bras M3 = 1,3 kg.m² 1.5- Homme assis : 80 kg à 0,18m M4 = 2,4kg.m² 4 « mesuré » 1.6- Homme assis + roue à bout de bras : M5 = 2,6 kg.m² 4 adopté 2- Moment cinétique de la roue Roue tournant à 10rd/s H = I. Ω = 0,2x 10 H = 2 kg.m²/s 3- Couple gyroscopique pour une précession de 0,5 rd/s C = dH/dt = H x précession = 2x 0,5 = 1 N.m (Newton x mètre) Nota : ce couple gyroscopique s’écarte de la verticale quand on incline la roue. C’est sa composante verticale qui entraîne la nacelle en rotation, voir ci-après. Modèle dynamique Â* H S cos  1/M S - moins Cv (couple vertical) Couple de rappel Û* S Û K 1- L’entrée est la vitesse de précession imposée à la roue : Â* (radians/seconde) 2- On multiplie par H pour obtenir le couple gyroscopique (Newton x mètre) 3- On multiplie par cos pour obtenir la projection sur la verticale 4- On divise par le moment d’inertie M de la nacelle + opérateur + roue de vélo 5- Ceci donne l’accélération angulaire de la nacelle autour de son axe vertical 6- On intègre par rapport au temps (S) pour obtenir la vitesse angulaire Û* 7- On intègre une seconde fois pour obtenir l’angle de déflexion Û de la nacelle 8- Une raideur K de la suspension ramène la nacelle vers son point mort. Nota : Dans la simulation, il faudra se donner des valeurs initiales des angles  (inclinaison de l’axe de roue sur l’horizontale) et Û (position angulaire de la nacelle par rapport à son « point mort ») et aussi Û*, vitesse de déflexion nacelle. Simulation numérique 1- Une simulation numérique sur tableur Excel « implémente » le schéma de la page précédente, savoir: L’injection d’une vitesse d’inclinaison de roue, à l’entrée. Et son intégration (symbole S) pour obtenir l’inclinaison atteinte (dont on prend le cosinus). La multiplication de cette vitesse d’inclinaison par H, moment cinétique de la roue, pour obtenir le couple gyroscopique… … dont on soustrait un couple de rappel possible, au cas où la suspension ne serait pas sans raideur. On obtient ainsi le couple total qui agit sur l’opérateur suspendu. Après division par le moment d’inertie M de l’opérateur suspendu, une première intégration par rapport au temps donne la vitesse angulaire, et une deuxième intégration la déflexion angulaire totalisée. Qui produit (avec une raideur K) un éventuel couple de rappel. 2- La valeur d’entrée pour l’inclinaison de roue a été programmée pour aboutir à une inclinaison jusque vers 90°, suivie par un retour en arrière de 180°. Voir un « portrait robot » des résultats, planche suivante. Allure des résultats Déflexion Précession 1 …vertical 2 Déflexion… 3 maximale 4 5 nulle Axe de roue… horizontal 6 7 vertical 8 9 très négative Dans les trois premières secondes, avec une précession imposée de presque 30°/s, l’axe de la roue se retrouve vertical. On repart alors en sens inverse, pour atteindre en 6 secondes de plus la position verticale opposée de l’axe de roue. Les déflexions pour la première phase (de l’ordre 20° à 45°) sont moindres que celles de la seconde phase (au moins le double). Sensibilité à divers paramètres Sensibilité à la vitesse de la roue Sans surprise, une vitesse de roue doublée (ou une masse en rotation doublée) va doubler, en gros, les angles de déflexion de la nacelle. Sensibilité à l’inertie portée par la nacelle (homme) Sans surprise, une inertie (moment) doublée divise en gros par deux les angles de déflexion de la nacelle. Sensibilité à la raideur de la suspension (couple de rappel) Annuler la raideur de la suspension augmente un peu les déflexions. Mais, avec les valeurs adoptées (0,5 N.m/rd, à vérifier), c’est un terme secondaire. Sensibilité à la vitesse de précession imposée à la roue Passer de 30°/s de précession au double (60°/s) tend à diminuer l’ampleur des déflexions de 25%, en gros. L’inertie suspendue est moins mobilisée par ce « régime impulsionnel ». Donc : faire précessionner la roue sans violence.
© Copyright 2026 Paperzz